Изобретение относится к области робототехнике, в частности к захватным устройствам промышленных роботов.
Целью изобретения является повышение надежности работы.
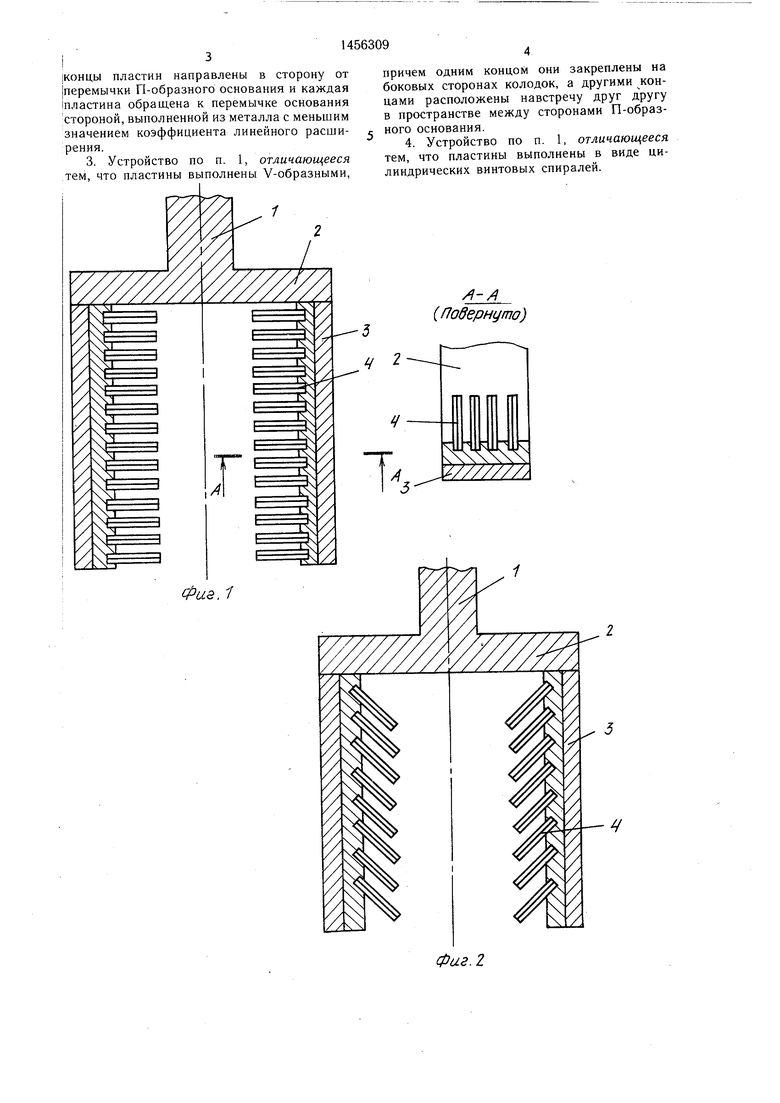
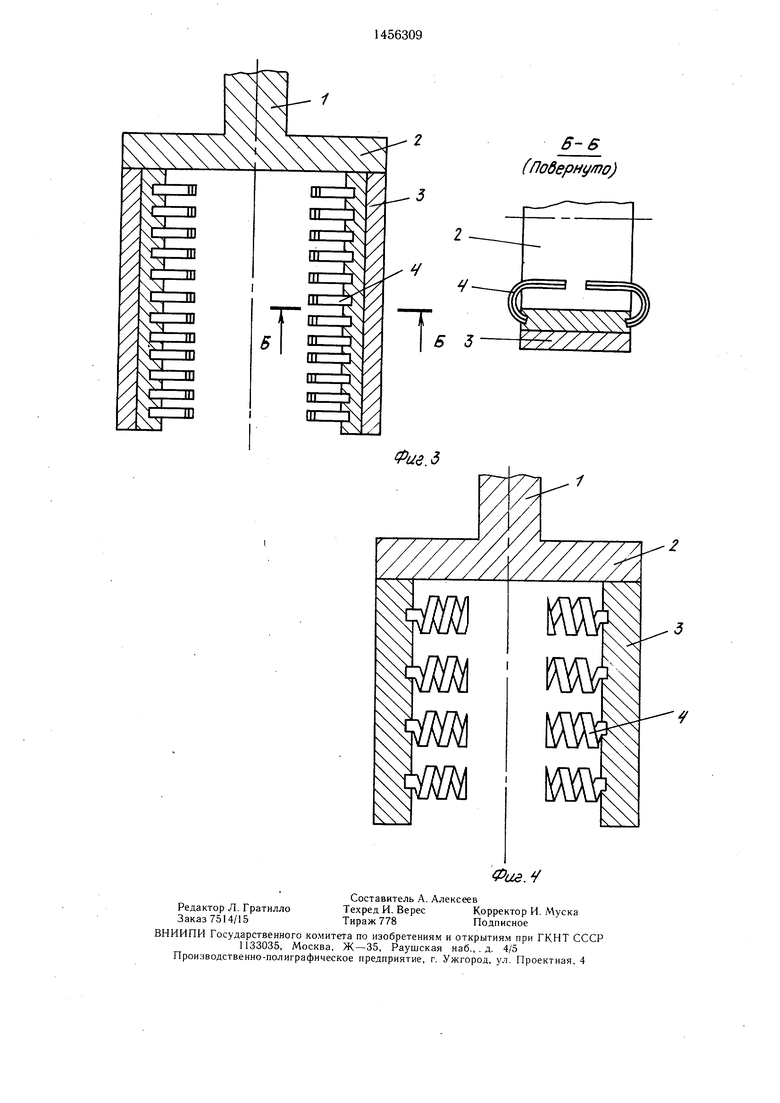
На фиг. 1 изображены захватное устройство, разрез А-А (щетина зажимных элементов выполнена из консольно закрепленных в колодках термобиметаллических пластин); на фиг. 2 - захватное устройство со шетиной из пластин, закрепленных в колодке с наклоном ее поверхности, разрез; на фиг. 3 - то же, со щетиной, выполненной из V-образных пластин, разрез Б-Б; на фиг. 4 - то же, со щетиной, выполненной из материала с памятью формы или в виде термобиметаллических пластин, выполненных в форме цилиндрических вин- товых спиралей.
Захватное устройство содержит размещенное на руке манипулятора основание 2, на котором жестко закреплены колодки 3 со щетиной из термобиметаллических пластин 4.
Захватное устройство работает следующим образом.
При нагревании пластин 4, например, электротоком или от детали, или други х источников тепла они деформируются, меняют свое положение относительно места 5 закрепления в колодках 3 и в зависимости от взаиморасположения в каждой пластине слоев с меньшим и большим температурным коэффициентом линейного расширения либо захватывают, либо освобождают де- Q таль. При охлаждении пластин происходит обратный процесс.
Формула изобретения
1.Захватное устройство, включающее 15 П-образное основание, на котором размещены захватные элементы, выполненные в виде щеток, отличающееся тем, что, с целью повышения надежности работы, тина щеток выполнена в виде термобиметаллических пластин, а колодки щеток закреплены на противоположно расположенных сторонах основания.
2.Устройство по п. 1, отличающееся тем, что пластины установлены наклонно к поверхности колодок, причем свободные
О
концы пластин направлены в сторону от перемычки П-образного основания и каждая пластина обращена к перемычке основания стороной, выполненной из металла с меньшим значением коэффициента линейного расширения.
3. Устройство по п. 1, отличающееся тем, что пластины выполнены V-образными,
причем одним концом они закреплены на боковых сторонах колодок, а другими концами расположены навстречу друг другу в пространстве между сторонами П-образного основания.
4. Устройство по п. 1, отличающееся тем, что пластины выполнены в виде цилиндрических винтовых спиралей.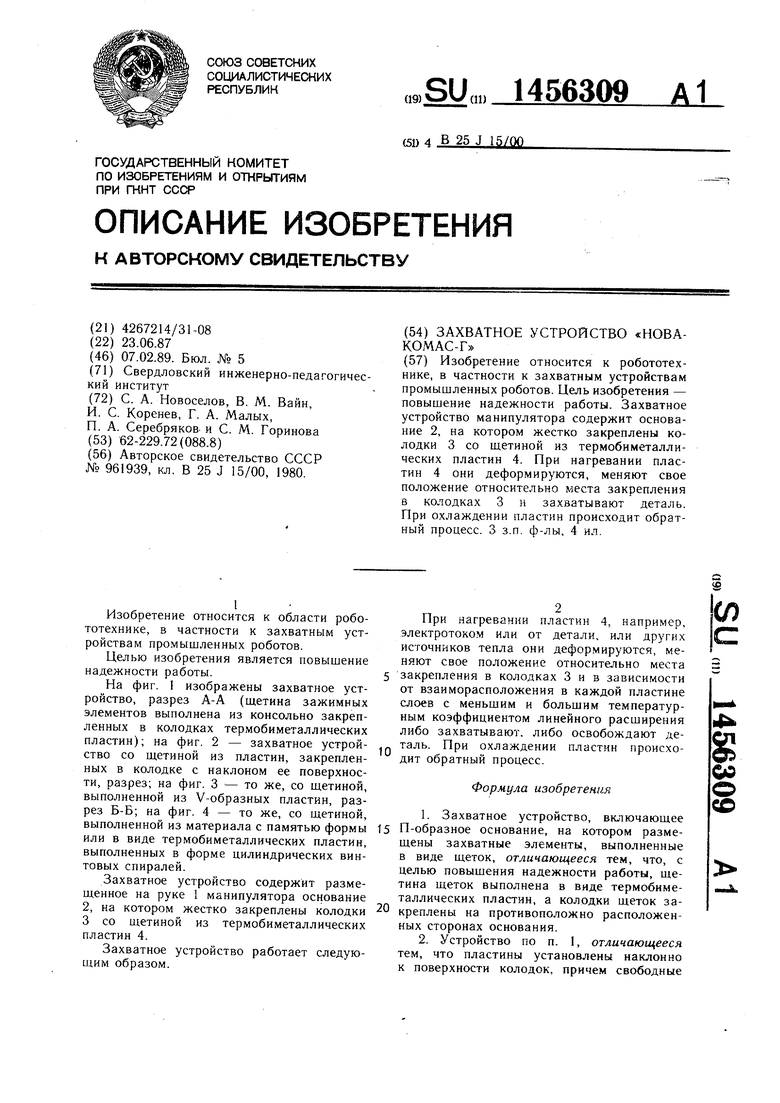
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1710339A1 |
| Линия для формования подошв на голенища обуви | 1985 |
|
SU1512472A3 |
| Машина для установки пучков щетины в отверстия колодок щеток | 1949 |
|
SU84642A1 |
| ЗУБНАЯ ЩЕТКА, ГОЛОВКА ЗУБНОЙ ЩЕТКИ И СПОСОБ ИЗГОТОВЛЕНИЯ ЗУБНОЙ ЩЕТКИ | 2003 |
|
RU2334445C2 |
| ЗУБНАЯ ЩЕТКА (ВАРИАНТЫ) И СПОСОБ ИЗГОТОВЛЕНИЯ ЗУБНОЙ ЩЕТКИ (ВАРИАНТЫ) | 2008 |
|
RU2502454C2 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ЩЕТОК | 1973 |
|
SU364306A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Приспособление для сборки цилиндрической щетки | 1989 |
|
SU1683657A1 |
| Захватное устройство | 1989 |
|
SU1743853A2 |
| Устройство для изготовления, наполнения и закрывания мешков | 1991 |
|
SU1838194A3 |
Изобретение относится к робототехнике, в частности к захватным устройствам промышленных роботов. Цель изобретения - повышение надежности работы. Захватное устройство манипулятора содержит основание 2, на котором жестко закреплены колодки 3 со ш,етиной из термобиметаллических пластин 4. При нагревании пластин 4 они деформируются, меняют свое положение относительно места закрепления в колодках 3 и захватывают деталь. При охлаждении пластин происходит обратный процесс. 3 з.п. ф-лы, 4 ил.
Фиг. 2
6-6
(Повернуто)
Б J
Фие.д
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
