Изобретение относится к машиностроению, в частности к рабочим органам манипуляторов, и может быть использовано для загрузочно-разгрузочных работ. Известно захватное устройство, содержавдее корпус с отверстиями в противоположных стенках, вставленные в них подпружиненные упругие пальцы и привод, выполненный в виде силового цилиндра, шток которого связан с многолучевой плоской пружиной, причем нижние концы пальцев установлены в лучах пружины с возможностью радиального перемещения. Известное устройство позволяет надежно захватывать детали произвольной формы, если их боковые поверхности образуют замкнутыйконтур. При опускании его на деталь часть упругих пальцев, оказавшихся непосредственно над деталью, при взаимодействии с ней поднимается вверх относительно корпуса и не будет участвовать в зажиме детали, а те пальцы, которые окажутся рядом с боковыми поверхностями детали по всему ее периметру, при срабатывании привода вступают в контакт с боковой поверхностью усилия зажима 1. Однако при зажиме гофрированных деталей, например насадок пластинчатых теплообменников химических теплообменных аппаратов, известное захватное устройство не обеспечит надежного захвата детали за гофры, расположенные параллельными ряЦель изобретения - повышение надежности захвата гофрированных деталей. Поставленная цель достигается тем, что в захватном устройстве, содержаш,ем корпус с отверстиями в противоположных стенках, вставленные в них подпружиненные упругие пальцы и привод, отверстия в каждой стенке корпуса диаметром, равным диаметру пальца, малые, чередуются в шахматном порядке с отверстиями диаметром, превышающим диаметр пальца, большими, а привод выполнен в виде ползуна с малыми отверстиями, размещенного между стенками корпуса, причем каждый палец вставлен в большое и малое отверстия корпуса и в малое отверстие ползуна. На фиг. 1 показано захватное устройство, общий вид; на фиг. 2 - вид А на фиг. 1. Захватное устройство содержит корпус 1 (фиг. 1), выполненный в виде изогнутой металлической обоймы о проушиной 2 для крепления на одиом из рычагов манипулятора. На верхней и нижней стенках корпуса в шахматном порядке выполнены овальные большие 3 и малые 4 отверстия, в которые вставлены упругие пальцы 5. Каждый палец 5 сверху имеет, сферическую головку 6, которая под действием пружины 7, упирающейся в бурт 8, упирается в края овального больщого 3 или малого 4 отверстия, фиксируя палец в крайнем нижнем положении. В корпус 1 вставлен ползун 9 в виде плоской текстолитовой пластины, в которой по количеству пальцев выполнены малые отверстия 10 с коническими фасками с обеих сторон. На выступающей из корпуса 1 стороне ползуна 9 установлена проушина 11,, связанная с подвижным рычагом манипулятора. На фиг. 1 также показана захватываемая деталь 12. Устройство работает следующим образом. В исходном положении ползун 9расположен так, что оси всех отверстий в корпусе и ползуне совпадают, пальцы 5 занимают строго вертикальное положение. Под действием пружин 7 все пальцы до предела выдвинуты в сторону захватываемой детали 12. При опускании захватного устройства на деталь 12 часть пальцев упирается в выступающие участки гофр, и, поджимая пружины 7, в дальнейшем движении захватного устройства и в захвате детали не участвуют. Остальные пальцы опускаются между гофрами, располагаясь во впадинах детали 12. После этого на подвижный рычаг манипулятора, связанный с проушиной 11, подают команду на зажим детали. При этом проушина 11 и ползун 9 перемещаются вдоль стенок корпуса 1, увлекая, в ту же сторону упругие пальцы 5, вставленные в отверстия 10 ползуна 9. Поскольку каждый палец 4 с одной стороны корпуса 1 взаимодействует с малым отверстием 4 в его стенке, а с другой - с бол.ьшим 3, то поступательное перемещение при пода - ползуна 9 вызывает наклон пальцев 5, причем вследствие расположения малых 2 и больших 3 отверстий в стенках корпуса 1 в шахматном порядке каждые два соседних пальца 5 наклоняются в противоположные стороны. Это приводит к тому, что половина всех пальцев, оказавшихся во впадинах гофрированных деталей, нажимает на вертикальные стенки гофр в одну сторону, а остальные пальцы в другую, осуществляя захват гофрированных деталей по всем гофрам и по всей длине каждой гофры. Единственным условием надежного захвата являются взаимно перпендикулярные направления поступательного перемещения ползуна 9 и гофр детали 12. Поскольку шаг между гофрами может не совпадать с расстояниями между соседними рядами отверстий, то величина поступательного перемешения концов пальцев при их наклоне во впадинах гофр будет различной. Это различие компенсируется упругостью самих пальцев, благодаря чему практически все пальцы, оказавшиеся в впадинах гофр, прижимаются к их боковым сторонам. По сравнению с известным захватным устройством, в котором все упругие пальцы под действием привода наклоняются к центру устройства, предлагаемое обеспечивает
взаимодействие большего количества пальцев со всеми гофрами детали с обеих сторон каждой гофры, что повышает надежность захвата гофрированных деталей.
Прнменение изобретения позволяет повысить надежность захвата гофрированных деталей, а также производительность и качество продукции.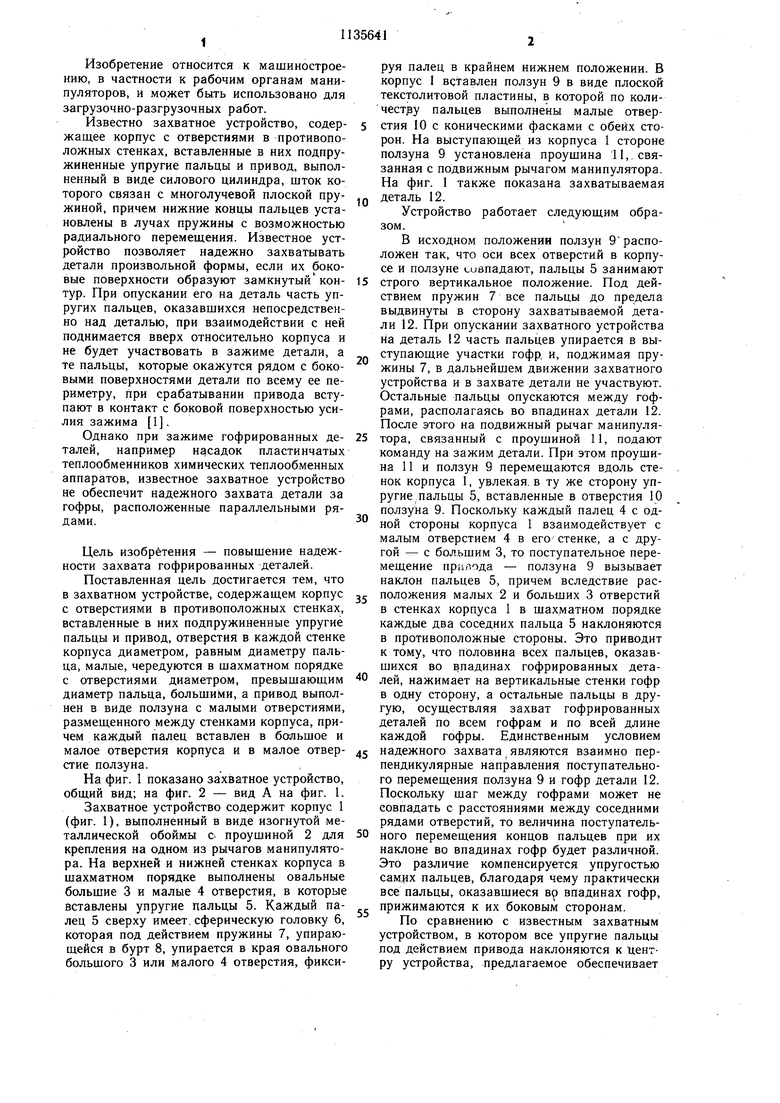
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Элеваторное бункерное загрузочное устройство | 1980 |
|
SU874307A1 |
| Шарнир гусеничной цепи | 1980 |
|
SU908644A2 |
| БАМПЕРНОЕ ЗАЩИТНОЕ УСТРОЙСТВО АВТОМОБИЛЯ | 2011 |
|
RU2478052C2 |
| ПЕРЕДНЯЯ ОПОРА РОТОРА ВЕНТИЛЯТОРА ДВУХКОНТУРНОГО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2014 |
|
RU2602470C2 |
| Захватное устройство | 1986 |
|
SU1313703A1 |
| Захват манипулятора | 1986 |
|
SU1364470A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Захватное устройство | 1985 |
|
SU1305029A1 |
| Захватное устройство | 1988 |
|
SU1625683A1 |
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус с отверстиями в противоположных стенках, вставленные в них подпружинные упругие пальцы и привод, отличающееся тем, что, с целью повышения надежности захвата гофрированных деталей отверстия в каждой стенке корпуса диаметром, равным диаметру пальца, малые, чередуются в шахматном порядке с отверстиями диаметром, превышаюш,им диаметр пальца, большими, а привод выполнен в виде ползуна с малыми отверстиями, размещенного между стенками корпуса, причем каждый палец вставлен в большое и малое отверстия корпуса и в малое отверстие ползуна. Л со ел О)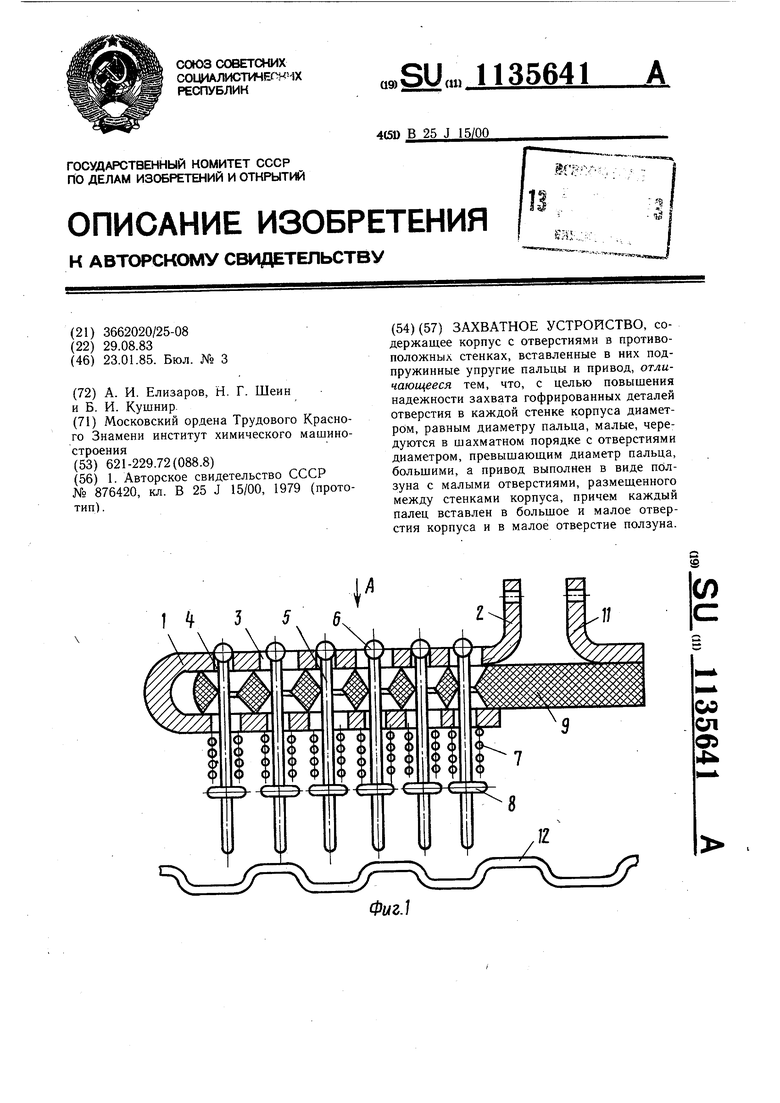
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватное устройство | 1979 |
|
SU876420A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
