тор, блок умножения, сумматор, выход которого подключен к первому входу регулятора, второй вход которого подключен к первому входу блока умножения, к вычитающему входу второго блока сравнения и к выходу объекта управления, который является выходом системы, выход регулятора подключен к вычитающему входу первого блока сравнения, выход которого подключен к входу объекта управления, а суммирующий вход - к выходу источника управляющего воздействия и к входу эталонной модели, выход которой подключен к суммирующему входу второго блока сравнения, выход которого подключен к второму входу блока умножения, дополнительно введен генератор опорных сигналов, п каналов настройки, каждый из которых содержит интегратор, первый и второй умножители, выход каждого канала настройки подключен к соответствующему входу сумматора, первые входы каналов настройки подключены к выходу блока умножения, а вторые входы - к соответствующим выходам генератора опорных, сигналов, причем первый вход первого умножителя каждого канала настройки является первым входом канала настройки, второй вход первого умножителя является вторым входом канала настройки и подключен к первому входу второго умножителя, выход которого является выходом канала настройки, а второй вход подключен к выходу интегратора, выход которого подключен к выходу первого умножителя.
На фиг.1 приведена структурная схема системы; на фиг.2-4 - циклограммы работы известной и предлагаемой систем.
: На схеме обозначены источник 1 управ- ляющего воздействия, первый блок 2 срав- нения, объек1г 3 управления, эталонная модель 4, регулятор 5, второй блок 6 сравнения, блок 7 умножения, каналы 8 настройки, первый 9 и второй 10 умножители, интеграторы 11, генератор 12 опорных сигналов и сумматор 13,
В качестве объекта 3 управления рассматривается существенно нестационарный объект управления первого порядка с передаточной функцией вида Г .
р + МТ)
гдер
dt
a(t) - ограниченная функция времени.
В простейшем случае регулятор 5 может быть реализован на основе блока умножения 2.
Генератор 12 опорных сигналов в общем случае формирует на своих выходах
периодические линейно независимые сигналы, период которых равен Т. На выходах генератора 12 опорных сигналов формируются сигналы вида
U 12 См Г,
т.е. U12 - Со: U« Cit; Ui2 - С2Г и т.д., где n 1,N; N - число каналов настройки. В момент времени t m T, m 1,M, все выходные сигналы сбрасываются в ноль.
Кроме указанных опорных сигналов могут быть применены другие периодические линейно независимые сигналы, например вида cisln tort; dicos(Mi t; C2SlnoJ21; d2cos (ai и т.д.
Эталонная модель 4 представляет собой устойчивое Стационарное звено первого порядка с передаточной функцией вида
1
р+аэ
где аэ - известная константа.
Система работает следующим образом. Сигнал g с выхода источника 1 управляющего воздействия подается на вход эталонной модели 4 и на первый вход первого
блока 2 сравнения. В последнем сигнал g сравнивается с выходным сигналом регулятора 5. С выхода первого блока 2 сравнения сигнал поступает на вход объекта 3 управления/ Выходные сигналы объекта 3 управления и эталонной модели 4 поступают на входы второго блока 6 сравнения, в котором выходной сигнал эталонной модели 4 вычитается из выходного сигнала объекта 3 управления. Выходной сигнал второго блока 6
сравнения поступает на второй вход блока 7 умножения, на первый вход которого поступает выходной сигнал объекта 3 управления.
С выхода блока 7 умножения сигнал поступает на первые входы всех устройств 8 настройки, на вторые входы которых поступают выходные сигналы генератора 12 опорных сигналов. В каждом n-м канале 8 настройки выходной сигнал блока 7 умножения умножается на соответствующий выходной сигнал генератора 12 опорных сигналов (т.е. на опорный сигнал) U«n в первом умножителе 9, выходной сигнал которого интегрируется в интеграторе 11. Выходной
сигнал интегратора 11 умножается на опорный сигнал Uian во втором умножителе 10, выходной сигнал которого является выходным сигналом п-го канала 8 настройки. Входные сигналы всех каналов 8 настройки
суммируются в сумматоре 13. .
Выходной сигнал сумматора 13 поступает на управляющий вход регулятора 5, изменяя его коэффициент передачи. В простейшем случае, при реализации регулятора
5 на основе блока умножения 2, выходной сигнал регулятора 5 равен произведению выходного сигнала объекта 3 управления на выходной сигнал сумматора 13,
При необходимости область примене- нмя системы может быть распространена на объекты более высокого порядка. Так, например, при объекте второго порядка добавляются сравнение производных выходных сигналов объекта 3 управления и эталонной модели 4 и аналогичные каналы 8 настройки коэффициента передачи регулятора 5 по производной и т.д.
При моделировании в качестве объекта 3 управления используют устройство с пе- редаточной функцией
1... : ;
р +ао +ai t
а в качестве эталонной модели 4 - с передаточной функцией ; . 1 .. : -.;: р + аэ ; : vU
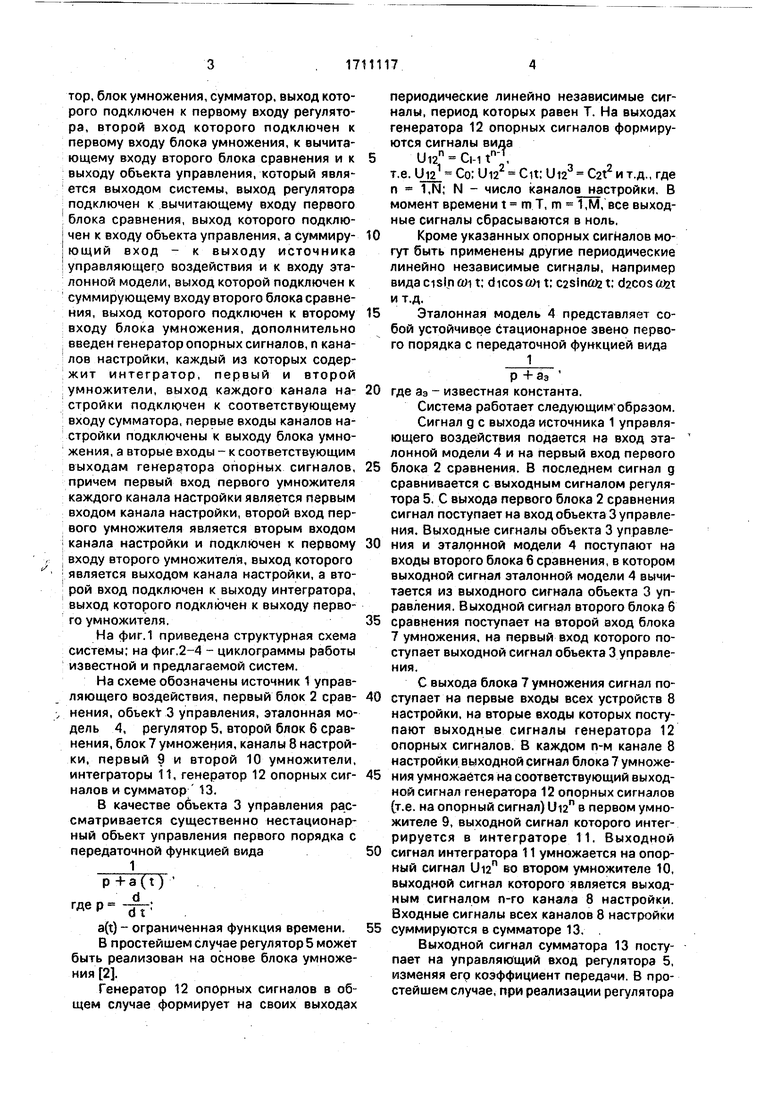
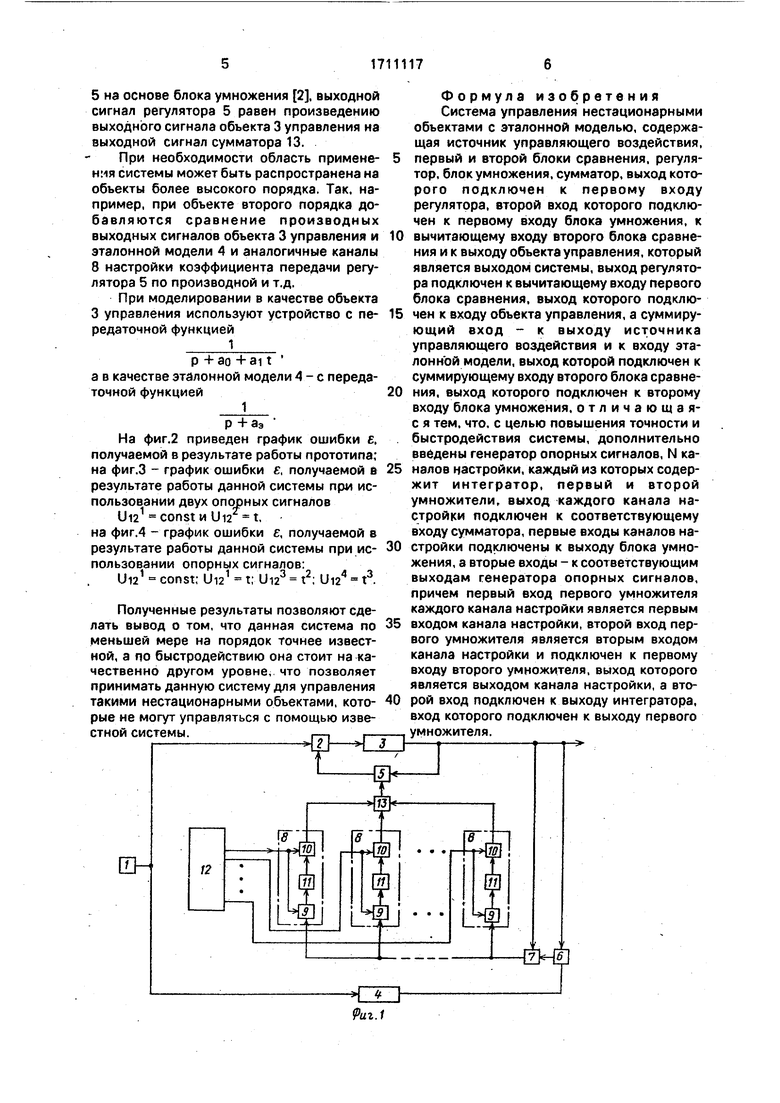
На фиг.2 приведен график ошибки в, получаемой в результате работы прототипа; на фиг.З - график ошибки Е, получаемой В результате работы данной системы при Использовании двух опорных сигналов
U121 COnStHUl2 t,
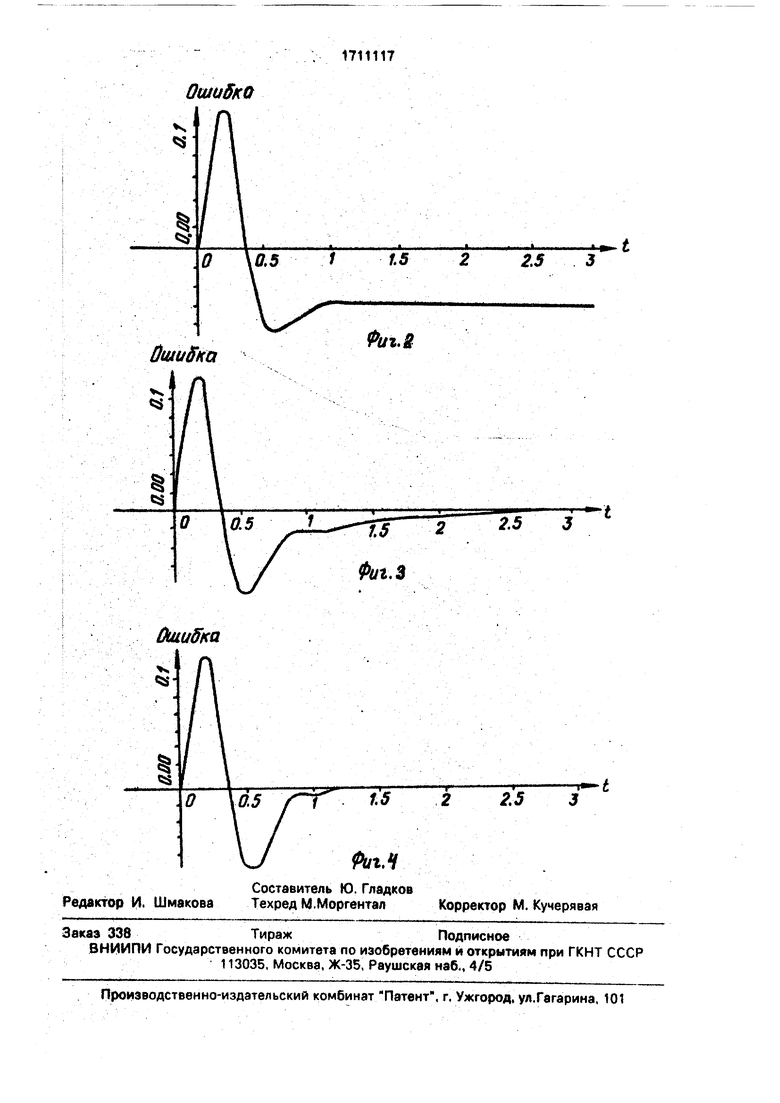
на фиг.4 - график ошибки е, получаемой в результате работы данной системы при ис- пользовании опорных сигналов:
U121 ч const; Ui21 t; Ui23 -12; Ui24 тД.
Полученные результаты позволяют сделать вывод о том, что данная система по меньшей мере на порядок точнее известной, а по быстродействию она стоит на -качественно другом уровне,, что позволяет принимать данную систему для управления такими нестационарными объектами, кото- рые не могут управляться с помощью известной системы..
-И
Формула изобретения Система управления нестационарными объектами с эталонной моделью, содержащая источник управляющего воздействия, первый и второй блоки сравнения, регулятор, блок умножения, сумматор, выход которого подключен к первому входу регулятора, второй вход которого подключен к первому входу блока умножения, к вычитающему входу второго блока сравнения и к выходу объекта управления, который является выходом системы, выход регулятора подключен к вычитающему входу первого блока сравнения, выход которого подключен к входу объекта управления, а суммирующий вход - к выходу источника управляющего воздействия и к входу эта лонной модели, выход которой подключен к суммирующему входу второго блока сравнения, выход которого подключён к второму входу блока умножения, о т л и ч а ю щ а я- с я тем. что, с целью повышения точности и быстродействия системы, дополнительно введены генератор опорных сигналов, N каналов настройки, каждый из которых содержит интегратор, первый и второй умножители, выход каждого канала настройки подключен к соответствующему входу сумматора, первые входы каналов настройки подключены к выходу блока умножения, а вторые входы - к соответствующим выходам генератора опорных сигналов, причем первый вход первого умножителя каждого канала настройки является первым входом канала настройки, второй вход первого умножителя является вторым входом канала настройки и подключен к первому входу второго умножителя, выход которого является выходом канала настройки, а второй вход подключен к выходу интегратора, вход которого подключен к выходу первого умножителя.
Ошибки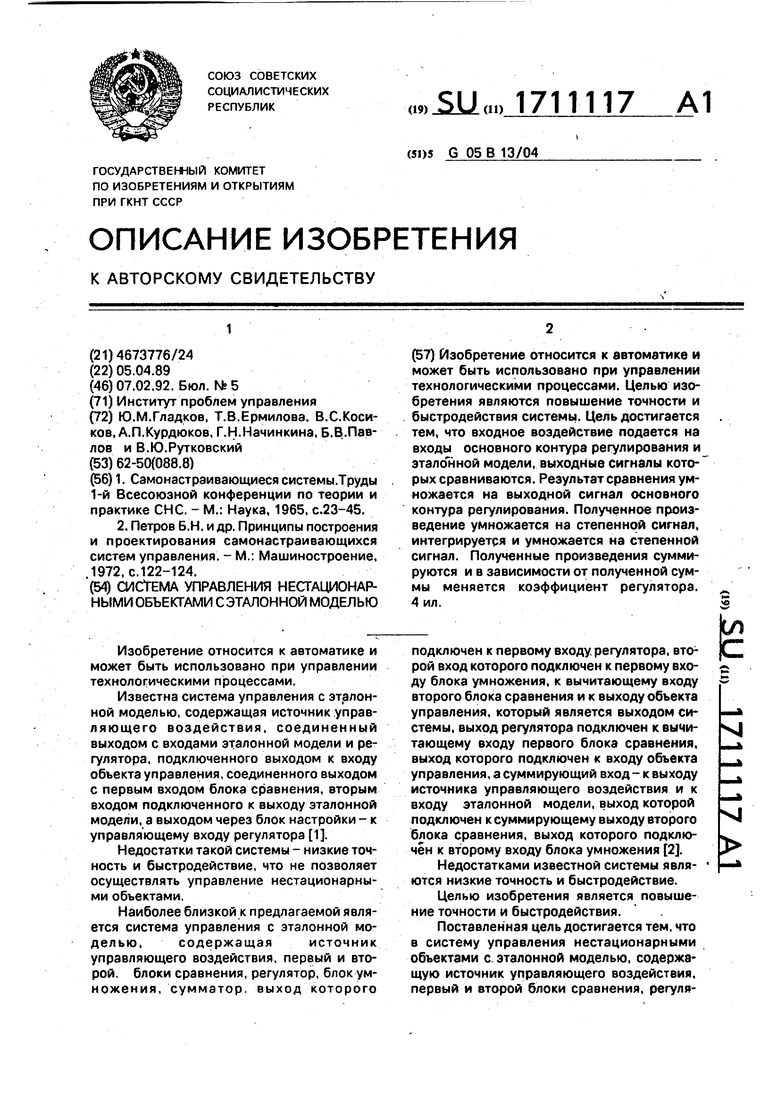
| название | год | авторы | номер документа |
|---|---|---|---|
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1990 |
|
RU2047887C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ | 2005 |
|
RU2295151C2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| АДАПТИВНАЯ СИСТЕМА СЛЕЖЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2294005C1 |
| Система управления | 1991 |
|
SU1792539A3 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |
Изобретение относится к автоматике и может быть использовано при управлении технологическими процессами. Целью изобретения являются повышение Точности и быстродействия системы., Цель достигается тем, что входное воздействие подается на входы основного контура регулирования и эталонной модели, выходйые сигналы кото- рых сравниваются. Результат сравнения умножается на выходной сигнал основного контура регулирования. Полученное произведение умножается на степенной сигнал, интегрируется и умножается на степенной сигнал. Полученные произведения суммируются и в зависимости от полученной суммы меняется коэффициент регулятора. 4 ил. подключен к первому входу регулятора, второй вход которого подключен к первому входу блока умножения, к вычитающему входу второго блока сравнения и к выходу объекта управления, который является выходом системы, выход регулятора подключен к вычитающему входу первого блока сравнения, выход которого подключен к входу объекта управления, а суммирующий вход - к выходу источника управляющего воздействия и к входу эталонной модели, выход которой подключен к суммирующему выходу второго блока сравнения, выход которого подключен к второму входу блока умножения 2. Недостатками известной системы являются низкие точность и быстродействие. Целью изобретения является повышение точности и быстродействия. -.., Поставленная цель достигается тем, что в систему управления нестационарными объектами с эталонной моделью, содержащую источник управляющего воздействия, первый и второй блоки сравнения, регуля& (Ј Ы
Ошибка
+ t
Риг.2
Фиг.З
Риг.Ч
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.: Наука, 1965, с.23-45 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Петров | |||
| и др | |||
| Принципы построения и проектирования самонастраивающихся систем управления | |||
| - М.: Машиностроение, 1972, с.122-124. | |||
