Изобретение относится к области машиностроения, а более конкретно к устройствам для прецизионного перемещения изделий в нанотехнологии.
Известно устройство перемещения для нанотехнологии, содержащее стол, направляющую и привод, выполненный в виде пьезоэлектрических преобразователей, установленных под углом и жестко прикрепленных одним концом к столу [авт. свид. СССР 529509, кл. Н 01 L 21/66, 1976].
Недостатком аналога являются малые кинематические возможности, т.к. прецизионное перемещение осуществляется только в плоскости по трем координатам в малом диапазоне линейных величин.
Наиболее близким по технической сущности и достигаемому результату является устройство перемещения для нанотехнологии, содержащее стол и направляющую, шесть пьезоэлектрических преобразователей, связанных со столом и направляющей по структуре l-координат [авт. свид. СССР 1713065, кл. Н 02 N 2/00, H 01 L 41/09].
Недостатком прототипа являются также малые кинематические возможности, так как прецизионные перемещения осуществляются в пространстве по шести координатам в малом диапазоне линейных и угловых величин. К тому же наличие жесткой связи между преобразователями оказывает существенное влияние на их взаимные перемещения и в конечном итоге снижает точность прецизионного перемещения в нанотехнологии.
В основу изобретения положена следующая техническая задача: расширить кинематические возможности устройства.
Поставленная задача решается тем, что в устройстве перемещения, содержащем стол и направляющую, шесть пьезоэлектрических преобразователей, связанных со столом и направляющей по структуре l-координат, пьезоэлектрические преобразователи связаны со столом и направляющей посредством двенадцати упругих торсионов соответственно, в устройство дополнительно введено шесть приводов и неподвижное основание, причем приводы связаны с направляющей и основанием посредством двенадцати шарниров соответственно также по структуре l-координат, причем шарниры и торсионы расположены на разных торцах направляющей.
Введение в устройство перемещения упругих торсионов, связывающих пьезоэлектрические преобразователи со столом и направляющей, основания и шести приводов, связывающих направляющую и основание посредством двенадцати шарниров, по шести шарниров на направляющей и основании соответственно, также по структуре l-координат обеспечивает высокую точность перемещения в широком диапазоне линейных и угловых перемещений, что и обеспечивает достижение поставленной задачи - расширение кинематических возможностей устройства.
Сущность изобретения поясняется чертежом, где показано устройство перемещения.
Устройство перемещения содержит стол 1 и направляющую 2, шесть пьезоэлектрических преобразователей 3-8, связанных со столом 1 и направляющей 2 по структуре l-координат. Пьезоэлектрические преобразователи 3-8 связаны со столом 1 и направляющей 2 посредством двенадцати упругих торсионов 9-20. В устройство дополнительно введено шесть приводов 21-26 и основание 27, причем приводы 21-26 связаны с направляющей 2 и неподвижным основанием 27 посредством двенадцати шарниров 28-39 соответственно также по структуре l-координат, причем шарниры 34-39 и торсионы 15-20 расположены на разных торцах направляющей 2. Приводы 21-26 могут быть выполнены как электромеханическими, так и гидро- или пневмомеханическими.
Устройство перемещения работает следующим образом: при включении приводов 21-26 последние изменяют длину (увеличивают или уменьшают) каждой из l-координат, происходит перемещение направляющей 2 относительно неподвижного основания 27.
При подаче напряжения на пьезоэлектрические преобразователи 3-8 последние деформируются, происходит прецизионное перемещение стола 1 по шести координатам Декарта-Эйлера относительно направляющей 2.
Затем цикл повторяется. Таким образом с помощью приводов 21-26 происходит грубая настройка стола 1 на заданную пространственную позицию с погрешностью ±3 мкм, а с помощью пьезоэлектрических преобразователей 3-8 его точная, прецизионная настройка с погрешностью ±5 нм.
Применение в нанотехнологии предлагаемого технического решения устройства перемещения расширяет его кинематические возможности, т.е. позволяет точно перемещать изделия на большие расстояния порядка 150-300 мм, с погрешностью позиционирования ±0,5 нм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прецизионного перемещения изделий | 1989 |
|
SU1713065A1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2011 |
|
RU2461839C1 |
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| Манипулятор | 1986 |
|
SU1313686A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ ОСЦИЛЛИРУЮЩИМ ЭЛЕКТРОДОМ-ИНСТРУМЕНТОМ | 2018 |
|
RU2679501C1 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2004 |
|
RU2281515C1 |
Изобретение относится к области машиностроения, в частности к устройствам для прецизионного перемещения изделий в нанотехнологии. Устройство перемещения содержит стол и направляющую, шесть пьезоэлектрических преобразователей, связанных со столом и направляющей по структуре l-координат. Пьезоэлектрические преобразователи связаны со столом и направляющей посредством двенадцати упругих торсионов соответственно. В устройство дополнительно введено шесть приводов и неподвижное основание. Приводы связаны с направляющей и основанием посредством двенадцати шарниров соответственно также по структуре l-координат. Шарниры и торсионы расположены на разных торцах направляющей. Изобретение обеспечивает высокую точность перемещения в широком диапазоне линейных и угловых перемещений и расширение кинематических возможностей устройства. 1 ил.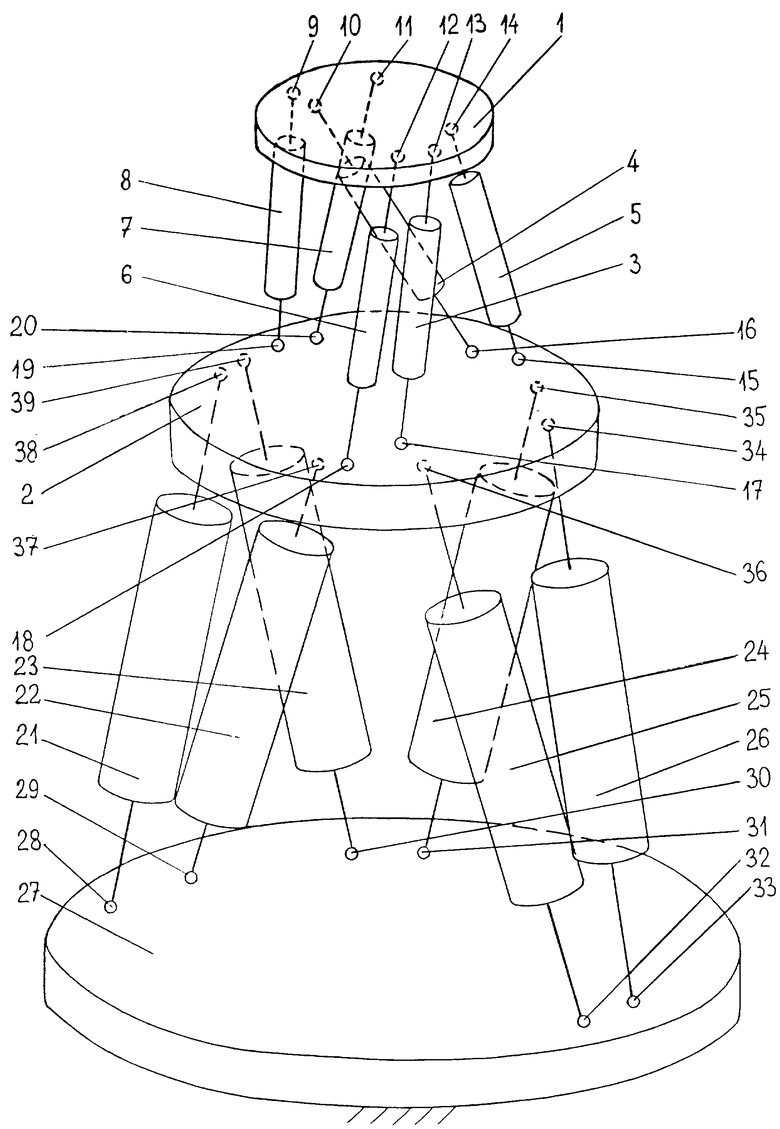
Устройство перемещения, содержащее стол и направляющую, шесть пьезоэлектрических преобразователей, связанных со столом и направляющей по структуре l-координат, отличающееся тем, что пьезоэлектрические преобразователи связаны со столом и направляющей посредством двенадцати упругих торсионов соответственно, в устройство дополнительно введено шесть приводов и неподвижное основание, причем приводы связаны с направляющей и основанием посредством двенадцати шарниров соответственно также по структуре l-координат, причем шарниры и торсионы расположены на разных торцах направляющей.
| Устройство для прецизионного перемещения изделий | 1989 |
|
SU1713065A1 |
| Устройство для прецизионного перемещения изделий | 1975 |
|
SU529509A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2065245C1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 1992 |
|
RU2083052C1 |
| Шланговое соединение | 0 |
|
SU88A1 |

