// //A////////// ////// ////
2 J
Г f9 20
СА) VJ VI Ч)
18
Изобретение относится к машиностроению, в частности к транспортным устройствам автоматических линий.
Цель изобретения - расширение технологических возможностей, повышение точности позиционирования заготовок и упрощение конструкций.
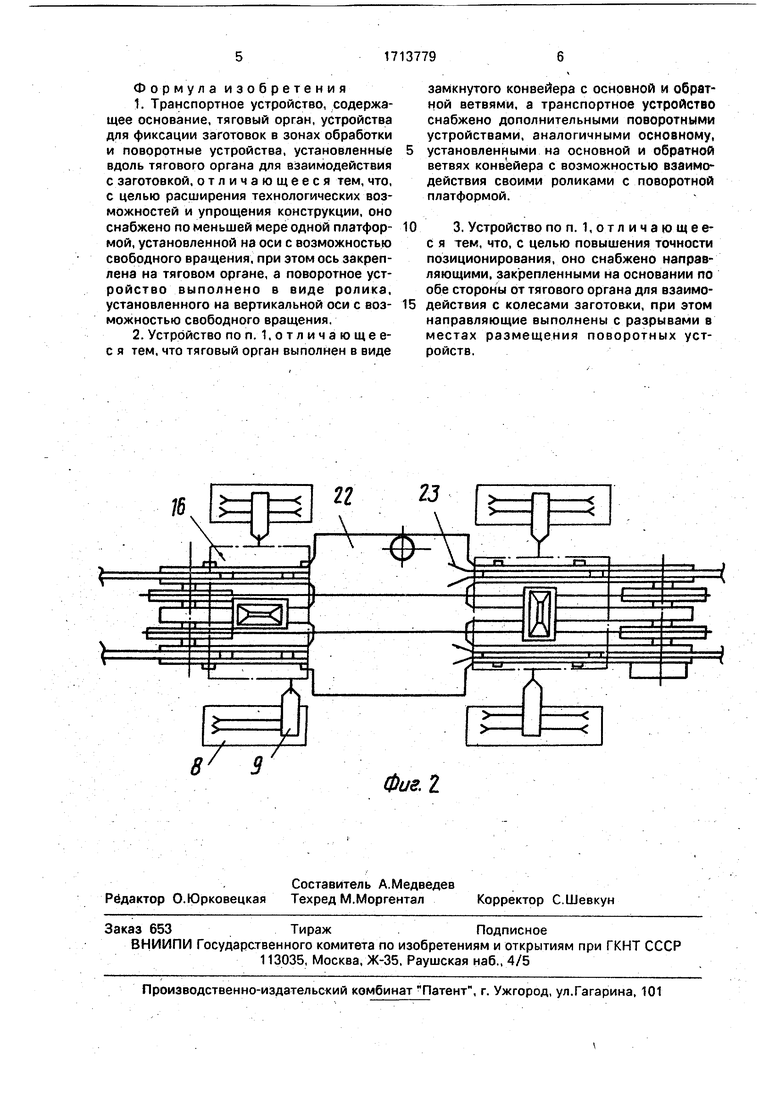
На фиг,1 показано устройство, общий вид; на фиг.2 - то же, вид сверху.
Транспортное устройство содержит основание 1, установленное на неподвижную опору (пол) 2. Тяговый орган выполнен в виде конвейера, ведущие- 3 и ведомые 4 звездочки которого соединены цепью 5. К звеньям цепи 5 жестко прикреплены оси 6 платформ 7, которые имеют возможность свободного вращения на осях 6. По обеим сторонам транспортного устройства установлены металлообрабатывающие станки 8 с рабочими головками 9, непосредственно обрабатывающими заготовку 10. Станки 8 попарно образуют зону обработки. В промежутке между зонами обработки на основании 1 закреплена ось 11 с вращающимся на ней роликом 12 таким образом, чтобы создавать препятствие движению заготовки 10 с одной стороны, когда она движется широкой частью вперед, и не препятствовать движению, когда она движется узкой частью вперед. Заготовка 10 снабжена колесами 13. Платформа 7 снабжена ловителем 14, соответствующим по форме некруглому отверстию, выполненному в нижней части заготовки 10, а колеса 13 движутся по направляющим 15, имек}щим впадиньГ16 в строго заданном положении в зонах обработки. Во впадинах 16 направляющих 15 установлены конечные выключатели 17, злектрически соединенные параллельно, а группы конечных выключателей 17 разных зон обработки злектрически соединены последовательно. На обратной ветви 18 цепи 5 на основании 1 закреплена ось 19 ролика 20, взаимодействующего с платформами 7 аналогично взаимодействию роликов 12 с заготовками 10. На основании 1 закреплены упоры 21, предназначенные для базировки заготовки 10 на горизонтальной плоскости. В зоне разворота заготовки 10 на основании 1 в направляющих 15 имеются разрывы, которые образуют площадку 22, направляющие 15 на входе в них колес 13 имеют ловители 23. Транспортное устройство работает следующим образом.
Включается привод ведущих звездочек 3 и цепь 5 вместе с платформами 7 приходит в движение в направлении стрелок. Когда одна платформа 7 на ведомой звездочке 4 займет горизонтальное положение, на нее
устанавливают заготовку 10 широкой стороной по ходу движения, при этом ловитель 14 входит в некруглое отверстие заготовки 10 и она подается в зону обработки.
, Одновременно заготовка 10 устанавливается колесами 13 на направляющие 15. При входе заготовки 10 в зону обработки сначала одно переднее колесо 13, попав по
0 впадину 16, нажимает на конечный выключатель 17. Однако движение не прекращается, так как параллельно подсоединен следующий конечный выключатель. При дальнейшем движении и переднее, и заднее
5 колеса 13 попадают во впадины 16, одновременно нажимают на два конечных выключателя 17, и конвейер останавливается. Одновременно заготовка 10 ложится на упоры 21, служащие установочной базой. Зажатие заготовки 10 производится известными средствами (кэ показано). Далее конвейер вновь приводится в движение. На выходе из зоны обработки колеса 13 сходят с направляющих 15 на площадку 22.
Одним краем заготовка 10 взаимодействует с роликом 12 и поворачивается вместе с платформой 7 вокруг оси 6. Угол поворота обусловлен расстоянием от края ролика 12
0 до оси 6 поворота. Это расстояние, равное половине ширины заготовки 10, обеспечивает угол поворота 90°. После поворота передние колеса 13 ловителями 23 направляются на направляющие 15 и подаются в
5 следующую зону обработки. Соединение конечных выключателей таково, что позволяет производить движение и последовательные остановки во всех зонах обработки даже одной заготовки 10 при отсутствии других.
0 После окончания обработки заготовка 10 по направляющим 15 удаляется за пределы конвейера, ловитель 14 с платформой 7 по ведущим звездочкам опускается, и заготовка 10 останавливается. Платформа 7, находясь на обратной ветви 18 и проходя мимо ролика 20, взаимодействует с ним и поворачивается аналогично повороту заготовки 10 роликом 12. При дальнейшем движении платформа 7 возвращается в начальное положение на ведомых звездочках 4.
На транспортном устройстве возможен многократный поворот заготовки на 90 (ме показано). Для этого начетных промежутках между зонами обработки устанавливаются
5 дополнительные поворотные ролики с возможностью взаимодействия с платформой 7. При нахождении промежутков между зонами обработки ролики поочередно взаимодействуют то с заготовкой, то с платформой и каждый раз поворачивают их на 90°.
Формула изобретения
1.Транспортное устройство, содержащее основание, тяговый орган, устройства для фиксации заготовок в зонах обработки и поворотные устройства, установленные вдоль тягового органа для взаимодействия с заготовкой, отличающееся тем, что, с целью расширения технологических возможностей и упрощения конструкции, оно снабжено по меньшей мере одной платформой, установленной на оси с возможностью свободного вращения, при этом ось закреплена на тяговом органе, а поворотное устройство выполнено в виде ролика, установленного на вертикальной оси с возможностью свободного вращения.
2.Устройство по п. 1,отличающеес я тем, что тяговый орган выполнен в виде
замкнутого конвейера с основной и обратной ветвями, а транспортное устройство снабжено дополнительными поворотными устройствами, аналогичными основному, установленными на основной и обратной ветвях конвейера с возможностью взаимо действия своими роликами с поворотной платформой.
3. Устройство по п. 1,отличающееС я тем, что, с целью повышения точности позиционирования, оно снабжено направляющими, закрепленными на основании по обе стороны от тягового органа для взаимодействия с колесами заготовки, при этом направляющие выполнены с разрывами в местах размещения поворотных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1985 |
|
SU1273302A1 |
| Устройство для загрузки контейнеров изделиями | 1989 |
|
SU1705190A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Тележечный конвейер | 1985 |
|
SU1316934A1 |
| Роторно-конвейерная машина | 1990 |
|
SU1756237A1 |
| Ловитель кареток подвесного конвейерапРи ОбРыВЕ ТягОВОгО ОРгАНА | 1979 |
|
SU835903A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1983 |
|
SU1097543A1 |
| Устройство для подачи заготовок в зону обработки | 1990 |
|
SU1757770A1 |
| Устройство для аварийного выключения привода конвейера | 1985 |
|
SU1305096A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
Изобретение относится к машиностроению, в частности к транспортным устройствам автоматических линий. Цель изобретения - расширение технологических возможностей, упрощение конструкции и повышение точности позиционирования заготовок., Указанная цель достигается тем, что заготовку 10 размещают на поворотной платформе 7, которая установлена на оси 6. закрепленной на тяговом органе. В местах разрыва направляющих 15 на площадке заготовка 10 взаимодействует своим краем с роликом 12 и разворачивается. На обратной ветви 18 транспортного устройства установлен ролик 20. который взаимодействует непосредственно с платформой 7 и разворачивает ее в исходное положение. 2 з.п. ф-лы. 2 ил.
Фи8. 1
| Авторское свидетельство СССР №4360939 | |||
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
