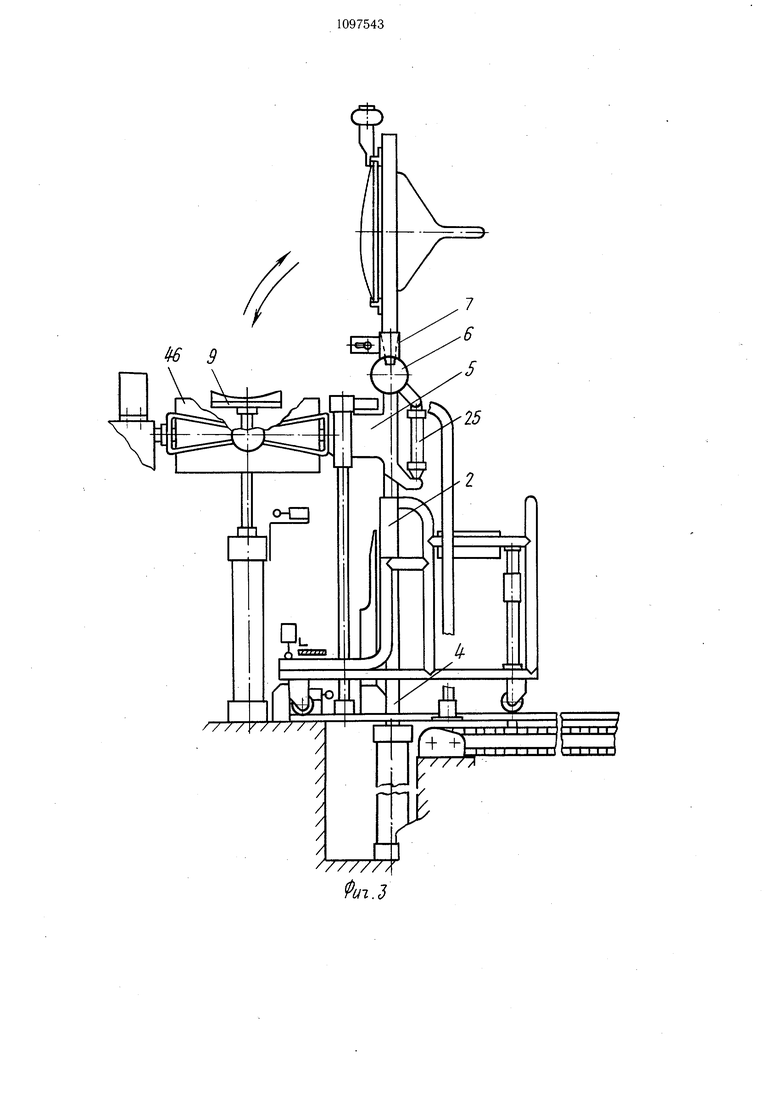
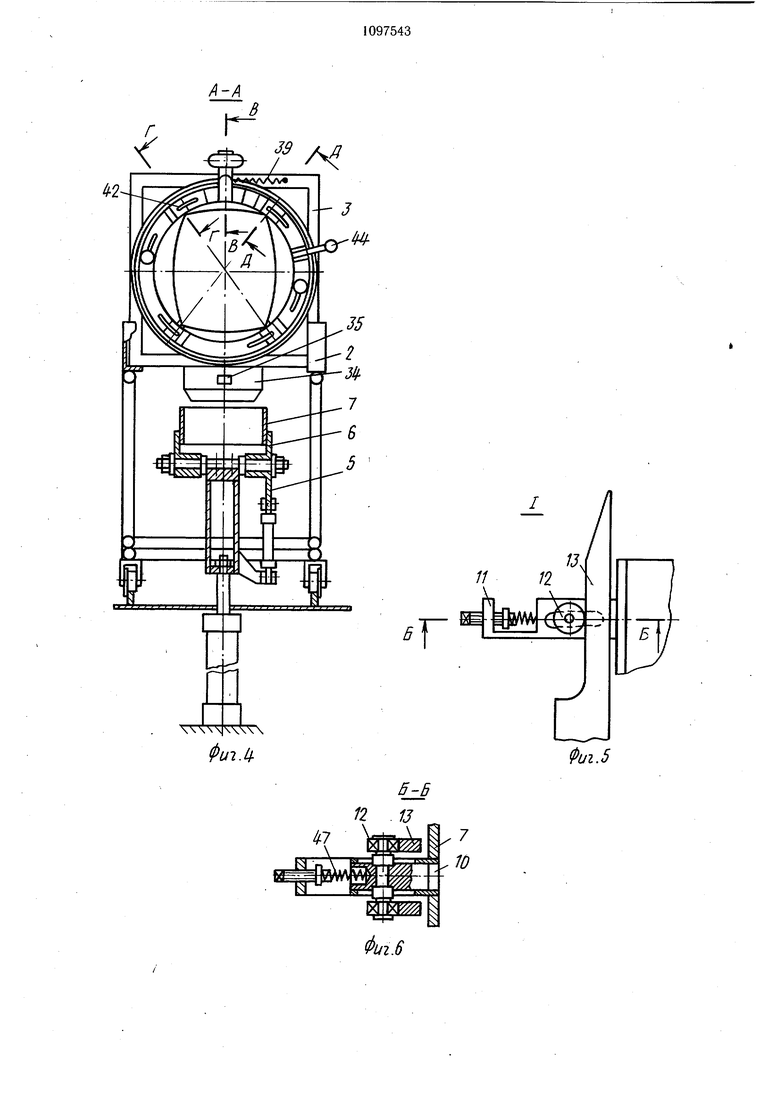
Изобретение относится к механизацим и автоматизации подъемно-транспортных работ и может быть использовано в различных отраслях промышленности для передачи изделий посредством транспортировки и перегрузки с одновременным их подъемом и кантованием, в частности для транспортировки и перегрузки кинескопов. Известно устройство для передачи изделий с одного конвейера на другой, включающее смонтированную на станине площадку выдачи и перемещающуюся между подающим и отводящим конвейерами гибким тяговым органом тележку с подъемной рамкой 1 . Однако в данном устройстве подъем рамки осуществляется одновременно с поворотом и не обеспечивается съем изделий с разной высоты подающего конвейера. Известно также устройство для передачи изделий с одного конвейера на другой, включающее смонтированную на станине площадку выдачи и перемещающуюся между подающим и отводящим конвейерами гибким тяговым органом тележку с установленной на ней подвижной от механизма подъема рамкой 2. Это устройство, обеспечивая перемещение изделия в вертикальной плоскости, не позволяет производить кантование изделия в процессе перегрузки, что ограничивает технологические возможности устройства. Кроме того, сложность конструкции тележки из-за наличия щатунов и стрелки не обеспечивает стабильности в работе, а отсутствие запорных органов приводит к трудности позиционирования изделий при перегрузке. Цель изобретения - расщирение технологических возможностей устройства. Цель достигается тем, что в устройстве для передачи изделий с одного конвейера на другой, включающем смонтированную на станине площадку выдачи и перемещающуюся между подающим и отводящим конвейерами гибким тяговым органом тележку с устаноБленной на ней подвижной от механизма подъема рамкой, тележка снабжена направляющими, в которых установлена с возможностью вертикального перемещения и съема с тележки посредством механизма подъема подвижная рамка, при этом механизм подъема выполнен в виде приводной вертикально перемещающейся каретки, снабженной поворотным приспособлением с ловителем . подвижной рамки. Ловитель подвижной рамки снабжен подпружиненным фиксатором, имеющим механизм управления, выполненный в виде соединенного с фиксатором ролика и установленного на станине копира. На фиг. 1 изображено устройство для передачи изделий с одного конвейера на другой в исходной позиции, общий вид; на фиг. 2 - то же, в позиции перегрузки в начале подъема изделия; на фиг. 3 - то же, в позиции перегрузки в конце подъема изделия; на фиг. 4 - разрез А-А на фиг. 2; на фиг. 5 - узел I на фиг. 1; на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 - разрез В-В на фиг. 4; на фиг. 8 - разрез Г-Г на фиг. 4; на фиг. 9 - разрез Д-Д на фиг. 4; на фиг. 10 - вид Е на фиг. 1; на фиг. 11 - вид Ж на фиг. 1. Устройство содержит тележку 1 с установленной в ее направляющих 2 подвижной рамкой 3, механизм подъема, выполненный в виде вертикально перемещающейся от пневмопривода 4 каретки 5, снабженной поворотным устройством 6 с ловителем 7, станину 8 и площадку выдачи 9. Ловитель 7 оснащен фиксатором 10, размещенным в корпусе 11 и имеющим механизм управления в виде ролика 12 и копира 13, смонтированного на станине 8, на котором также имеются путепроводы 14 для передвижения по ним тележки 1 между подающим конвейером 15 и отводящим конвейером 16, ограничивающий ее передвижение упор 17, жестко закрепленные с помощью растяжек 18 направляющие 19 для перемещения каретки 5 механизма подъема. Площадка выдачи 9, имеющая платформу 20, жестко закреплена на штоке пневмоцилиндра 21, установленного на станине 8. Тележка 1 щарниром 22 соединена с гибким тяговым органом 23, имеющим электропривод 24 и конечные выключатели 25-27, управляющие работой электропривода 24. В гнезде подвижной рамки 3 установлено кольцо 28 на щариках 29 с установленными на нем штырями 30 и запорное кольцо 31 с захватами 32 для крепления кинескопа 33 при установке его в рамку 3 тележки 1. К нижней части рамки 3 прикреплен нож 34 с отверстием 35, а на кольце 31 установлен кронштейн 36 с роликом 37, свободно вращающимся на оси 38. Цружина 39 удерживает запорное кольцо 31 с захватами 32 в исходном положении. Устройство для передачи изделий с одного конвейера на другой работает следующим образом. Тележка 1 занимает исходную позицию. Подвеска 39 щагового подвесного конвейера 15 с кинескопом 33 останавливается в позиции загрузки, -а конечный выключатель 27 включает привод 24 тележки 1. Последняя перемещается по путепроводу 14 и, отключая привод 24 конечным выключателем 40, останавливается в позиции загрузки. При этом щтыри 41 подвески 39 входят в отверстия 42 колец 28 и 31, а штыри 30 кольца 28 входят в отверстия ушек 43 кинескопа 33. Поворотом запорного кольца 31 от рукоятки 44 ушки 43 кинескопа 33 запираются захватами 32. Освобождение подвески 39 осуществляется запорным приспособлением 45 и последующим отходом тележки 1 в исходную позицию.
На исходной позиции тележки 1 возможен поворот кинескопа 33 вокруг своей оси на 90° с помощью диска 28, опирающегося на шарики 29, для осуществления операций по технологическому циклу.
Сигнал на включение привода 24 для перемещения тележки I в позицию перегрузки кинескопа 33 в корпус телевизионного приемника 46 выдается шаговым подвесным конвейером 15, взаимодействующим с конечным выключателем (не показан) при перемещении подвески 39 с позиции загрузки.
Тележка 1 с кинескопом 33, установленным и зафиксированным в рамке 3, перемещаясь из исходной позиции по путепроводу 14 станины 8, доходит до упора 17. Конечным выключателем 25 автоматически выключается электропривод 24, и включается пневмоцилиндр 4, шток которого поднимает каретку 5 механизма подъема.
При подъеме ловитель 7 захватывает нож 34 рамки 3, а ролики 12 фиксатора 10 перемещаются по копиру 13. При выходе рамки 3 из направляющих 2 тележки 1 ролики 12 сходят с копира 13, фиксатор 10 под действием пружины 47 входит в отверстие 35 ножа 34, запирая рамку 3. В конце хода щтока пневмоцилиндра 4 автоматически включается пневмоцилиндр 25. Поворотное устройство б механизма подъема поворачивает рамку 3 на 90°, устанавливая кинескоп 33 на пдатформу 20 площадки выдачи 9,
подъем которой автоматически осуществляется пневмоцилиндром 21. В конце перемещения рамки 3 ролик 37 под действием клина 48 поворачивает.запорное кольцо 31, а захваты 32 освобождают ушки 43, расфиксируя таким образом кинескоп 33. После расфиксации кинескопа 33 поворотное устройство б механизма подъема возвращает рамку 3 в исходное положение, а кинескоп 33 на площадке выдачи 9, перемещаясь вниз пневмоцилиндром 21, устанавливается в корпус телевизионного приемника 46, закрепленный на конвейере 16. В конце хода площадка выдачи 9 нажимает на конечный выключатель 49, который включает привод конвейера 16. Одновременно рамка 3 перемещается вниз пневмоцилиндром 4, опускаясь в направляющие 2 тележки I, ролики 12 заходят на копир 13, фиксатор 10 выходит из отверстия 35 ножа 34, отпирая рамку 3. При перемещении вниз рамка 3 доходит до упора в направляющих 2, ловитель 7 освобождает нож 34, а каретка 5 механизма подъема в конце хода нажимает на конечный выключатель 26, который дает команду электроприводу 24 на перемещение тележки 1 к подающему конвейеру 15 в исходную позицию.
Использование данного изобретения позволит механизировать грузопереработку кинескопов и других крупногабаритных изделий и улучшить условия труда.
18
/7.J
N
/
i/2.
i/г.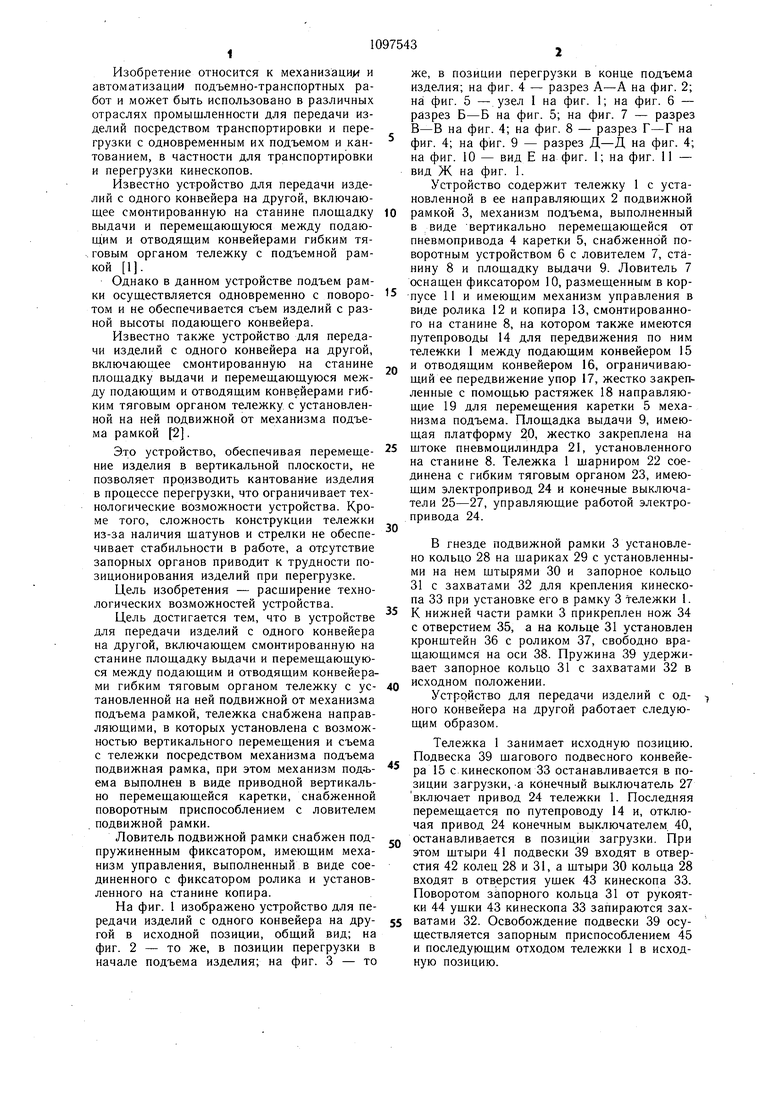

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для сборки изделий | 1985 |
|
SU1271703A1 |
| Конвейерная линия | 1976 |
|
SU646381A1 |
| Установка для сварки изделий | 1989 |
|
SU1794616A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1973 |
|
SU406787A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Приемно-передаточное устройство для линии металлообработки | 1984 |
|
SU1192946A1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Роботизированная линия для точечной сварки узлов легковых автомобилей | 1986 |
|
SU1357176A1 |
| Устройство для комплектовки камер пневматических шин элементами арматуры и гибки вентиля | 1980 |
|
SU1009802A1 |
1. УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ С ОДНОГО КОНВЕЙЕРА НА ДРУГОЙ, включающее смонтированную на станине площадку выдачи и перемещающуюся между подающим и отводящим конвейерами гибким тяговым органом тележку с установленной на ней подвижной от механизма подъема рамкой, отличающееся тем, что, с целью расширения технологических возможностей устройства, тележка снабжена направляющими, в которых установлена с возможностью вертикального перемещения и съема с тележки посредством механизма подъема подвижная рамка, при этом механизм подъема выполнен в виде приводной вертикально перемещающейся каретки, снабженной поворотным приспособлением с ловителем подвижной рамки. 2. Устройство по п. 1, отличающееся тем, что ловитель подвижной рамки снабжен подпружиненным фиксатором, имеющим механизм управления, выполненный в виде соединенного с фиксатором ролика и установленного на станине копира. (Л :о - ел N со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для МЕЖОПЕРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ ШТУЧНЬЕХ ГРУЗОВ | 0 |
|
SU180994A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Станок для двухстороннего колибрования древесностружечных плит по толщине | 1977 |
|
SU701797A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
