Изобретение относится к элементам подъемно-транспортных и роботизированных систем, предназначенных для подачи мягких этикеток из неметаллических материалов, и может найти применение на швейных, трикотажных, обувных и других предприятиях легкой промышленности.
Целью изобретения является упрощение конструкции и повышение надежности захвата деталей, преимущественно из мягкого материала
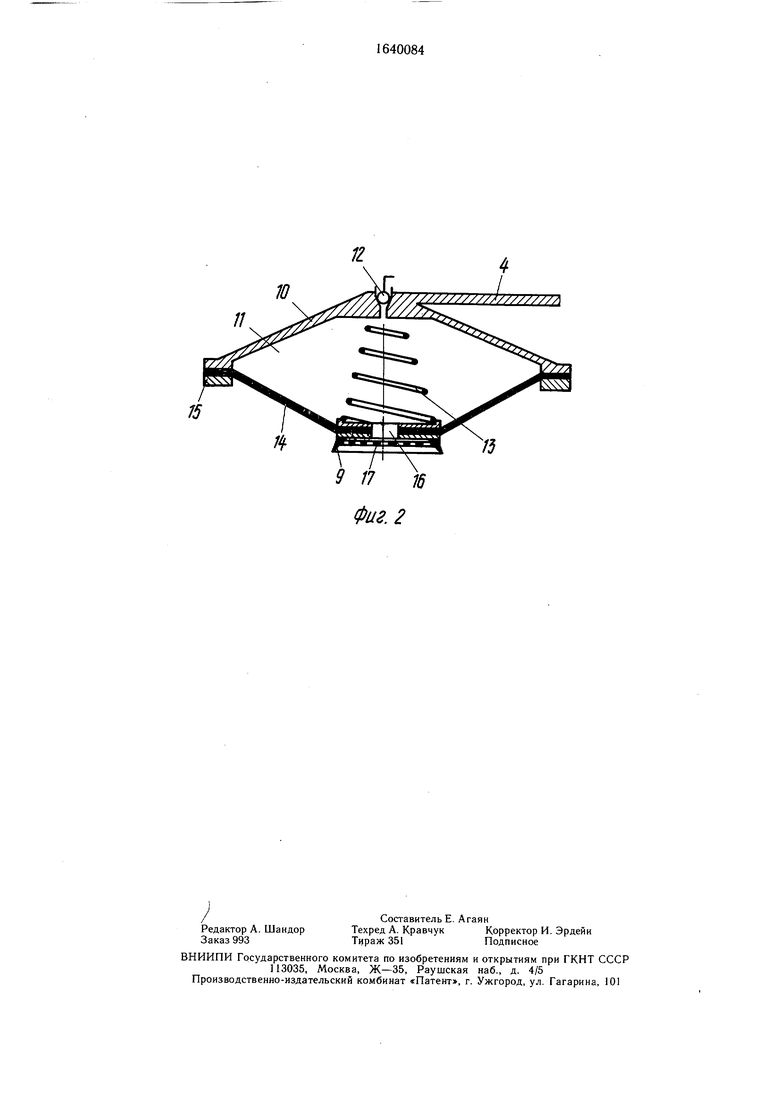
На фиг. 1 приведена принципиальная схема предлагаемого устройства; на фиг. 2 - захват
Устройство для подачи ярлыков из мягкого материала к швейным изделиям содержит магазин 1 ярлыков 2, вакуумный захват 3 и манипулятор 4 (фиг. 1). Устройство расположено около транспортера 5 для подачи швейного изделия 6 к швейной машине 7 и направляющего ремешкового транспортера 8. Вакуумный захват 3 выполнен в виде присоски 9 с индивидуальным насосом, размещенным в 10 захвата 3, который, в свою очередь, содержит вакуумную камеру 11 с управляемым обратным клапаном 12. пружин 13 и эластическую мембран 14, которая по наружному кольцевому контуру 15 сообщается с камерой 11, а в центре имеет присоску 9 со сквозным отверстием 16, причем присоска 9 снабжена опорной сеткой 17, вмонтированной во внутреннем пространстве присоски 9 на некотором удалении от ее края. На транспортере 5 закреплен рычаг 18 для управления работой захвата 3.
Устройство для подачи ярлыков к швейным изделиям работает следующим образом.
Манипулятор 4, совершив возвратно-поступательное вертикальное движение, вакуумным захватом 3 приближается к магазину 1 для ярлыков 2 и захватывает верхний из них. Затем поворотным движением тот же манипулятор 4 переносит ярлык 2 в сторону транспортера 5 и -накладывает его
0 4
оо
4-
на поверхности швейного изделия под направляющий ремешковый транспортер 8, который подводит их под иглу швейной машины 7.
Вакуумный захват работает следующим образом (фиг. 2).5
При опускании корпуса 10 камера 11 приближается к магазину 1 (фиг. 1), а присоска 9 опирается об верхний ярлык 2. Корпус 10, продолжая опускаться, сжимает пружину 13. Мембрана 14 через обратный кла- пан 12 выжимает воздух из камеры 11. Затем манипулятор 4 поднимает захват 3 вверх. Пружина 13 отжимает мембрану 14, разрежая воздух в камере 11. Образовавшийся вакуум удерживает ярлык 2 на поверхности присоски 9. Прогиб ярлыка 2 от дей- 15 захвата, ствия присасывающего усилия исключает сетка 17, которая не дает возможности ярлыку 2 прогнуться в полость присоски 9 и ввойти в непосредственный контакт с отверстием 16. Затем манипулятор 4 повоПоложительный эффект достигается за счет того, что захват содержит вакуумную камеру с управляемым обратным клапаном (это простота управляющей части устройства, так как захват путем его контакта с рычагом транспортера сам разгерметизируется и сбрасывает ярлык), что не требует на небольших предприятиях иметь центральную вакуумную систему.
Кроме того, опорная сетка, вмонтированная во внутреннем пространстве присоски на некотором удалении от ее края, исключает прогиб ярлыка (особенно легкой и тонкой бумаги) и обеспечивает прочность
Формула изобретения
Вакуумный захват для листовых деталей содержащий полый корпус с мембраной,
рГчивГетсяв сторону транспортера 5. Обрат- ™ образующие вакуумную камеру, ссвдднея- ный клапан 12 заходит в контакт с рыча-ную с атмосферой посредством обратного
гом 18 который, открывая клапан 12, унич-клапана, и присоску, закрепленную своим остожает вакуум в камере 11. Ярлычок 2нованием на мембране и соединенную с ваотделяется от присоски 9 и прилегает к по-куумной камерой отверстием в «сновайии,
верхности швейного изделия 6. Пружина 13 25 отличающийся тем, что, с целью Упроще
. о,,.,г. .r wiTUru 1Л ПОП КИП А НИ Я НЯ Л РЖ НОСТ И
растягивает мембрану 14 приводя захват 3 в исходное положение. Затем путем обратного поворота манипулятора 4 возвращает захват 3 к магазину 1, после чего цикл работы устройства повторяется. Синхронизация
ния конструкции и повышения надежности захвата деталей преимущественно из мягкого материала, обратный клапан смонтирован в вакуумной камере на корпусе захвата, а мембрана подпружинена относительно Kopj
ТЫ УСТРОИСТВа ПОВтиинетсм. иплиилпоаи,пл™%...- ..-r-.rJ
работы манипулятора 4 и транспортера 5 30 пуса, при этом присоска имеет опорный
/гг / .-.nouuuru апАмрит vrTPHO ВЛеННЫИ С
осуществлена посредством датчиков (не показаны).
перфорированный элемент, установленный с зазором от основания присоски.
захвата,
Положительный эффект достигается за счет того, что захват содержит вакуумную камеру с управляемым обратным клапаном (это простота управляющей части устройства, так как захват путем его контакта с рычагом транспортера сам разгерметизируется и сбрасывает ярлык), что не требует на небольших предприятиях иметь центральную вакуумную систему.
захвата,
Кроме того, опорная сетка, вмонтированная во внутреннем пространстве присоски на некотором удалении от ее края, исключает прогиб ярлыка (особенно легкой и тонкой бумаги) и обеспечивает прочность
Формула изобретения
отличающийся тем, что, с целью Упроще
,,.,г. .r wiTUru 1Л ПОП КИП А НИ Я НЯ Л РЖ НОСТ И
ния конструкции и повышения надежности захвата деталей преимущественно из мягкого материала, обратный клапан смонтирован в вакуумной камере на корпусе захвата, а мембрана подпружинена относительно Kopj
™%...- ..-r-.rJ
пуса, при этом присоска имеет опорный
пуса, при этом присоска имеет опорный
.-.nouuuru апАмрит vrTPHO ВЛеННЫИ С
перфорированный элемент, установленный с зазором от основания присоски.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки пакета магнитопровода | 1991 |
|
SU1801229A3 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Вакуумное захватное устройство | 1989 |
|
SU1815217A1 |
| Схват робота | 1987 |
|
SU1502299A1 |
| Устройство для печатания на листовом материале | 1989 |
|
SU1722880A1 |
| Захват манипулятора | 1987 |
|
SU1491703A1 |
| Устройство для отделения плоских заготовок от стопы | 1971 |
|
SU486839A1 |
| Вакуумный захватный орган | 1980 |
|
SU925820A1 |
Изобретение относится к роботизированным системам управления на предприятиях легкой промышленности и позволяет упростить конструкцию устройства и повысить надежность захвата деталей преимущественно из мягких материалов. Устройство содержит магазин для ярлыков, вакуумный захват и манипулятор. Вакуумный захват выполнен в виде присоски с индивидуальным насосом, размещенным в корпусе захвата, который содержит вакуумную камеру с управляемым обратным клапаном, пружину и эластичную мембрану, которая по наружному кольцевому контуру сообщается с камерой, а в центре имеет присоску со сквозным отверстием. Присоска снабжена опорной сеткой, вмонтированной во внутреннем пространстве присоски на некотором удалении от ее краев. 2 ил.
6
Фиг.1
ю
//
| Вакуумное захватное устройство | 1979 |
|
SU906887A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
