Изобретение относится к транспортным средствам, перемещающимся на колесах, с возвратно-поступательным движением в вертикальной плоскости элемента для подъема и опускания громоздких и тяжелых грузов с целью их погрузки или разгрузки.
Известен электропогрузчик с передней загрузкой (http://www.zik.ru/products/epl03kas_ru.htm), включающий несущую раму, рулевую и ведущую колесные пары, рулевое устройство, кинематически связанное с рулевой колесной парой, привод передвижения, кинематически связанный с приводной колесной парой, и грузозахватное устройство, расположенное перед ведущей колесной парой с внешней стороны.
Недостатком данного устройства является низкая маневренность, обусловленная большими радиусами поворота, характерными для схемы с рулевой и ведущей колесными парами, что приводит к уменьшению полезной площади складского помещения за счет большой ширины проездов и плавных поворотов, кроме того, невозможно транспортировать длинномерные грузы.
Наиболее близким к предлагаемому устройству является электропогрузчик с боковой загрузкой (http://www.kiit.ru/bokovye-dizelnye-pogruzchiki.html#axzz2EWdI2uxd), снабженный грузозахватным устройством, расположенным между рулевой и приводной колесными парами.
Данный электропогрузчик способен выполнять погрузочно-транспортные операции с длинномерными грузами, которые при транспортировке устанавливаются на несущую раму. Однако низкая маневренность присуща ему так же, как и электропогрузчику с передней загрузкой из-за больших радиусов поворота.
Целью изобретения является повышение маневренности электропогрузчика.
Указанная цель достигается тем, что обе колесные пары выполнены рулевыми и связанными между собой механизмом синхронного зеркально-симметричного поворота, что дает возможность уменьшения радиуса поворота.
Сущность изобретения заключается в том, что обе колесные пары выполнены рулевыми и сопряженными с рулевым устройством посредством механизма синхронного зеркально-симметричного поворота колесных пар, содержащего передачу винт-гайка, две реечные передачи, функционально связанные с рулевыми трапециями, а привод передвижения содержит четыре мотор-редуктора, выходное звено каждого из которых соединено с соответствующим колесом.
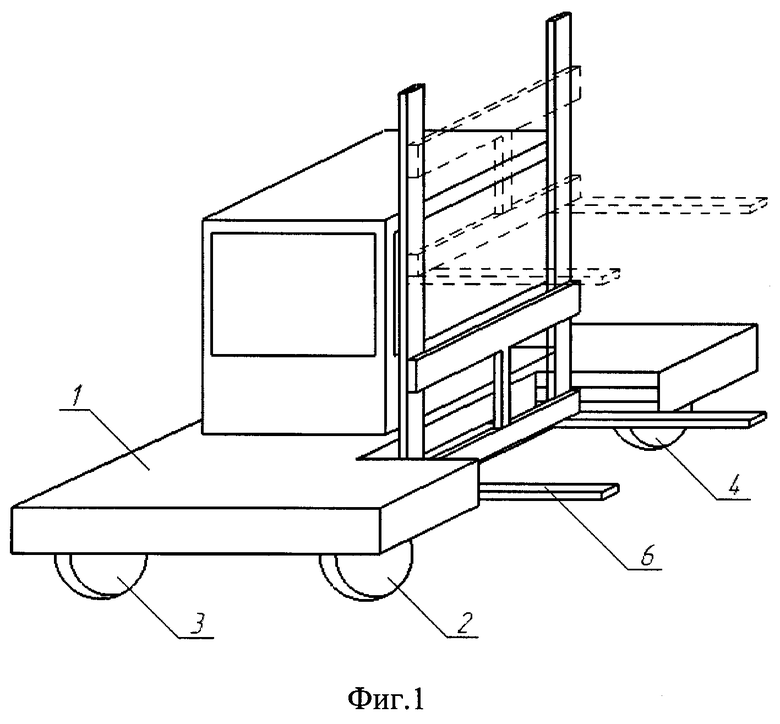
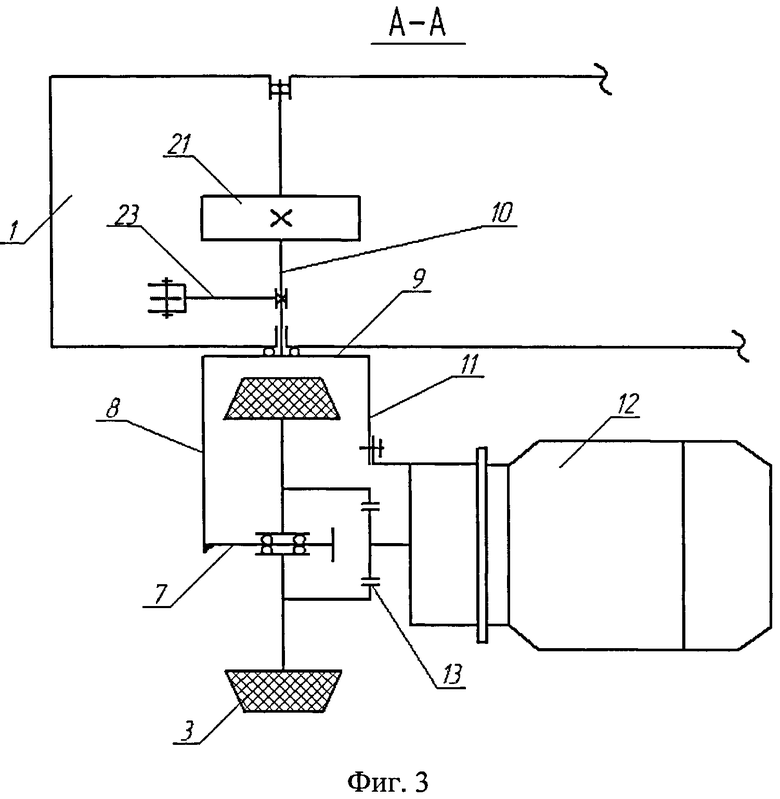
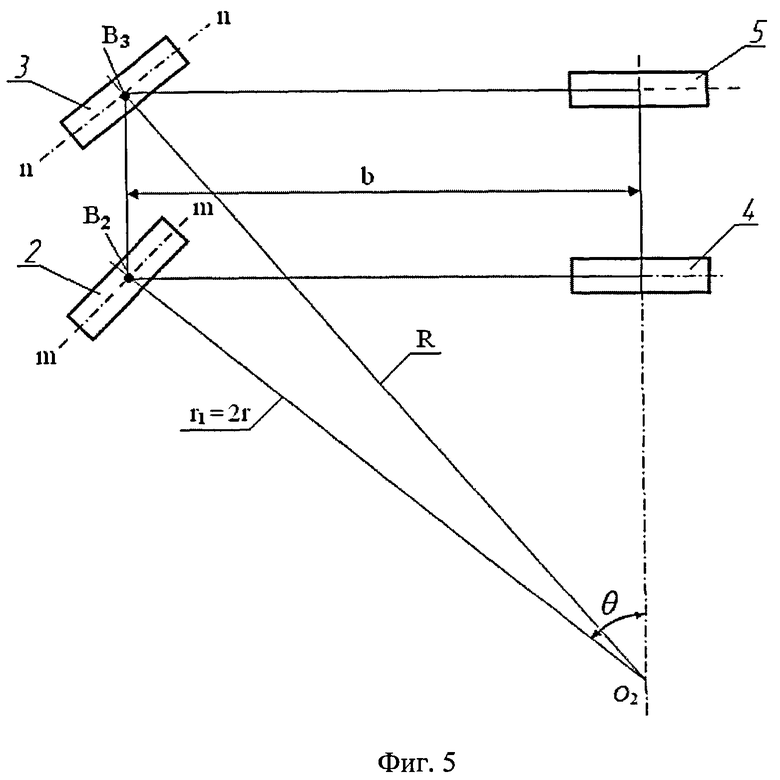
На фиг.1 представлен общий вид заявляемого электропогрузчика, на фиг.2 - кинематическая схема ходовой части во время прямолинейного передвижения, на фиг.3 - схема установки колес на несущей раме, на фиг.4 - кинематическая схема ходовой части при повороте электропогрузчика, у которого обе колесные пары являются рулевыми, на фиг.5 - кинематическая схема ходовой части при повороте электропогрузчика с рулевой передней колесной парой.
Электропогрузчик (фиг.1) содержит несущую раму 1, колеса 2, 3, 4, 5, кинематически объединенные в колесные пары 2-3 и 4-5, грузозахватное устройство (вилы) 6. Каждое колесо (фиг.3) смонтировано с возможностью вращения на оси 7, зафиксированной на щеке 8 вилки 9. Вал 10 вилки 9 установлен в опорах вращения на несущей раме 1. На щеке 11 вилки 9 закреплен входящий в привод передвижения мотор-редуктор 12, выходной вал которого зубчатым соединением 13 связан с колесом 3. Привод передвижения содержит также систему управления частотой вращения двигателей мотор-редукторов (не показана). Рулевое устройство 14 (фиг.2), размещенное на несущей раме 1, включает червячную передачу 15, причем в ступице 16 червячного колеса выполнена внутренняя ходовая резьба, с витками которой контактируют витки резьбового участка стержня 17, смонтированного в направляющих 18 несущей рамы 1 с возможностью поступательного перемещения. Таким образом, червячное колесо со стержнем 17 образуют передачу винт-гайка. Концы стержня 17 снабжены зубчатыми рейками 19 и 20, ориентированными так, что зубья рейки 20 повернуты относительно зубьев рейки 19 на угол 180 градусов. Рейка 19 введена в зацепление с шестерней 21, закрепленной на валу вилки колеса 3, а рейка 20 - с шестерней 22, закрепленной на валу вилки колеса 5. Составляющие пару колеса кинематически связаны между собой посредством рычагов 23, закрепленных на валах вилок, и тяг 24, шарнирно соединенных с рычагами. Два рычага и сопряженная с ними тяга составляют рулевую трапецию. Передача винт-гайка, реечные передачи 19-21, 20-22 и рулевые трапеции в совокупности представляют собой механизм синхронного зеркально-симметричного поворота колесных пар.
Предлагаемое устройство работает следующим образом.
В период прямолинейного перемещения электропогрузчика ступица 16 червячного колеса расположена посередине резьбового участка стержня 17, червячная передача 15 рулевого устройства 14 заторможена, оси 7 всех колес взаимно параллельны, тяги 24 рулевых трапеций параллельны между собой (фиг.2). Системой управления частотой вращения (не показана) установлены одинаковые угловые скорости вращения колес, чем и обеспечивается движение электропогрузчика по прямой.
Движение электропогрузчика по криволинейной траектории осуществляется с помощью механизма синхронного зеркально-симметричного поворота колесных пар. Рулевое устройство вращает червяк и связанное с ним передачей 15 червячное колесо. Положение червячного колеса относительно несущей рамы 1 неизменно, поэтому его вращение приводит к поступательному перемещению (например, на фиг.2 показано перемещение вправо) стержня 17 как винта передачи винт-гайка, вследствие чего рейка 19 поворачивает шестерню 21, а рейка 20, соответственно, шестерню 22. Направления поворота шестерен противоположны (на фиг.2 шестерня 21 повернута против часовой стрелки, а шестерня 22 - по часовой стрелке), а углы поворота α3 и α5 при равенстве диаметров шестерен равны между собой, то есть:
α3=α5=α.
Так как шестерни закреплены на валах 10 вилок 9, то вместе с ними на те же углы поворачиваются и колеса: с шестерней 21 - колесо 3, с шестерней 22 - колесо 5. Связь колес в парах 2-3 и 4 - 5 рулевыми трапециями приводит к одновременному с колесом 3 повороту колеса 2, с колесом 5 - колеса 4, причем углы их поворота
β2=β4=β.
Таким образом, обеспечивается симметрия колесных пар относительно оси A1-A2.
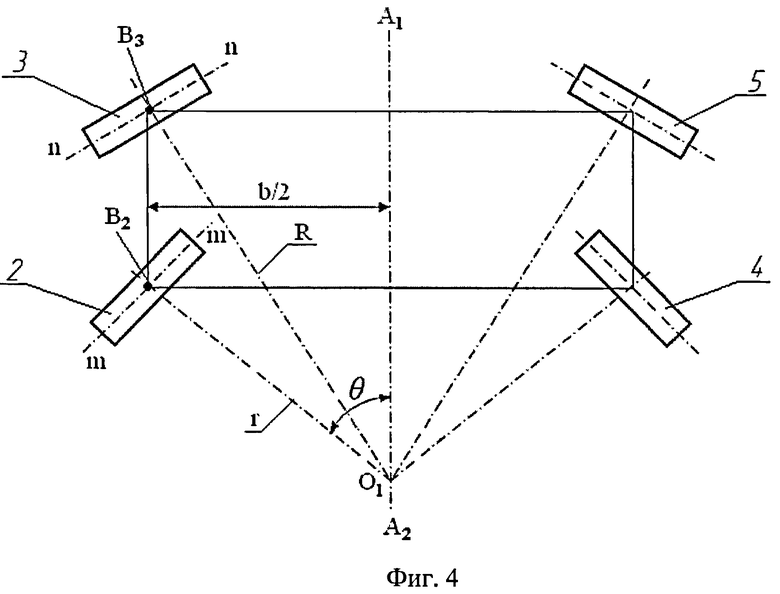
Пусть n-n и m-m (фиг.4) - прямые пересечения вертикальных плоскостей симметрии обода колеса 3 и обода колеса 2 с горизонтальной плоскостью (с плоскостью пола складского помещения), точки B3, B2 (фиг.4) - условные точки контакта колес с указанной плоскостью. Оптимальным с точки зрения отсутствия поперечной пробуксовки колес следует считать движение, при котором прямые n-n и m-m являются касательными к траекториям перемещения соответствующих колес, а перпендикуляры к ним, проходящие через точки B3 и B2, имеют общую точку пересечения (точку O1 на фиг.4) с осью симметрии A1-A2.
Выполнение названных условий обеспечивается соответствующим подбором геометрических параметров рулевых трапеций (длин рычагов и тяг, углов установки рычагов на валах 10).
В показанном на фиг.4 положении колеса 3 и 5 перемещаются по дуге окружности с радиусом R, а колеса 2 и 4 - по дуге окружности с радиусом r, причем центры обеих окружностей - точка О1.
Максимальным для транспортных средств углом поворота рулевых колес считается угол 45°(http://www.autoplazma.ru/?p=l 17). В случае выполнения равенства θ=45°, радиус r равен

где b - величина колесной базы (фиг.4).
Положения колес при повороте электропогрузчика с рулевой и ведущей колесными парами (например, http://www.kiit.ru/bokovye-dizelnye-pogruzchiki.html#axzz2EWdI2uxd) показаны на фиг.5. В данном случае радиус r1 равен
или в два раза больше, чем у предлагаемого электропогрузчика.
Таким образом, предлагаемое устройство позволяет с помощью разработанного механизма синхронного зеркально-симметричного поворота колесных пар повысить маневренность электропогрузчика за счет уменьшения радиуса поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМЫХ КОЛЕС | 1999 |
|
RU2168437C2 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| КОЛЕСНО-ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2331542C1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2004 |
|
RU2271955C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| Транспортное средство | 1989 |
|
SU1708685A1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Самоходное транспортное средство | 1984 |
|
SU1154137A1 |
| УСТРОЙСТВО РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ МОТОР-КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА. | 2020 |
|
RU2753938C1 |
Изобретение относится к транспортным средствам, перемещающимся на колесах, с возвратно-поступательным движением в вертикальной плоскости элемента для подъема и опускания громоздких и тяжелых грузов с целью их погрузки или разгрузки. Обе колесные пары электропогрузчика выполнены рулевыми и связаны между собой механизмом синхронного зеркально-симметричного поворота, что дает возможность уменьшения радиуса поворота. Колесные пары сопряжены с рулевым устройством посредством механизма синхронного зеркально-симметричного поворота колесных пар, содержащего передачу винт-гайка, две реечные передачи, функционально связанные с рулевыми трапециями. Привод передвижения содержит четыре мотор-редуктора, выходное звено каждого из которых соединено с соответствующим колесом. Изобретение позволяет с помощью механизма синхронного зеркально-симметричного поворота колесных пар повысить маневренность электропогрузчика за счет уменьшения радиуса поворота. 5 ил.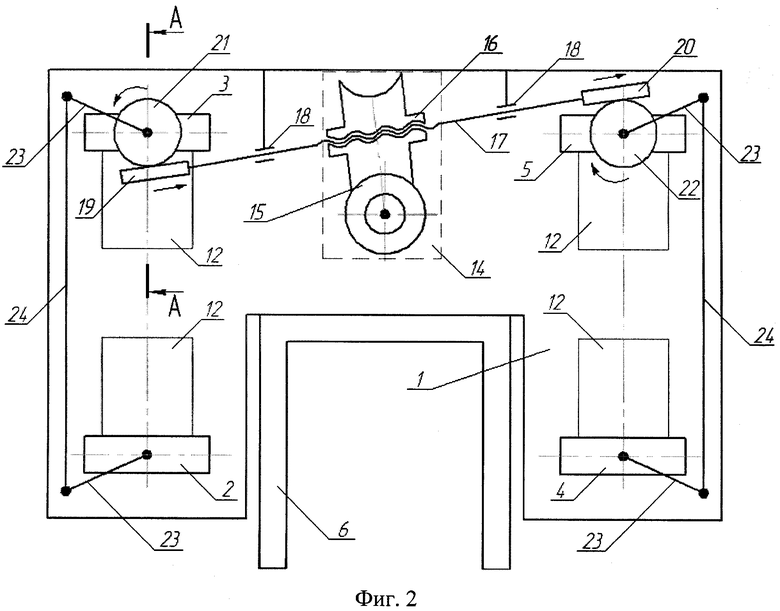
Электропогрузчик с боковой загрузкой, включающий раму, грузозахватное устройство, рулевое устройство, привод передвижения, рулевую колесную пару, приводную колесную пару, отличающийся тем, что обе колесные пары выполнены рулевыми и сопряженными с рулевым устройством посредством механизма синхронного зеркально-симметричного поворота колесных пар, содержащего передачу винт-гайка, две реечные передачи, функционально связанные с рулевыми трапециями, а привод передвижения содержит четыре мотор-редуктора, выходное звено каждого из которых соединено с соответствующим колесом.
| JPS53114134 A, 05.10.1978 | |||
| JPS5340930 A, 13.04.1978 | |||
| US 2003168286 A1, 11 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2004 |
|
RU2277488C1 |
| ЭЛЕКТРОПОГРУЗЧИК с БОКОВЫМ выдвижным ГРУЗОПОДЪЕМНИКОМ | 0 |
|
SU190267A1 |

