Изобретение относится к неразрушающему контролю и может быть использовано для получения изображения дефектов при акустическом контроле, основанном на явлений диффузного или зеркального отражения сигналов от дефектов.
Целью изобретения является расширение области использования путем применения при зеркальном и теневом акустических методах контроля.
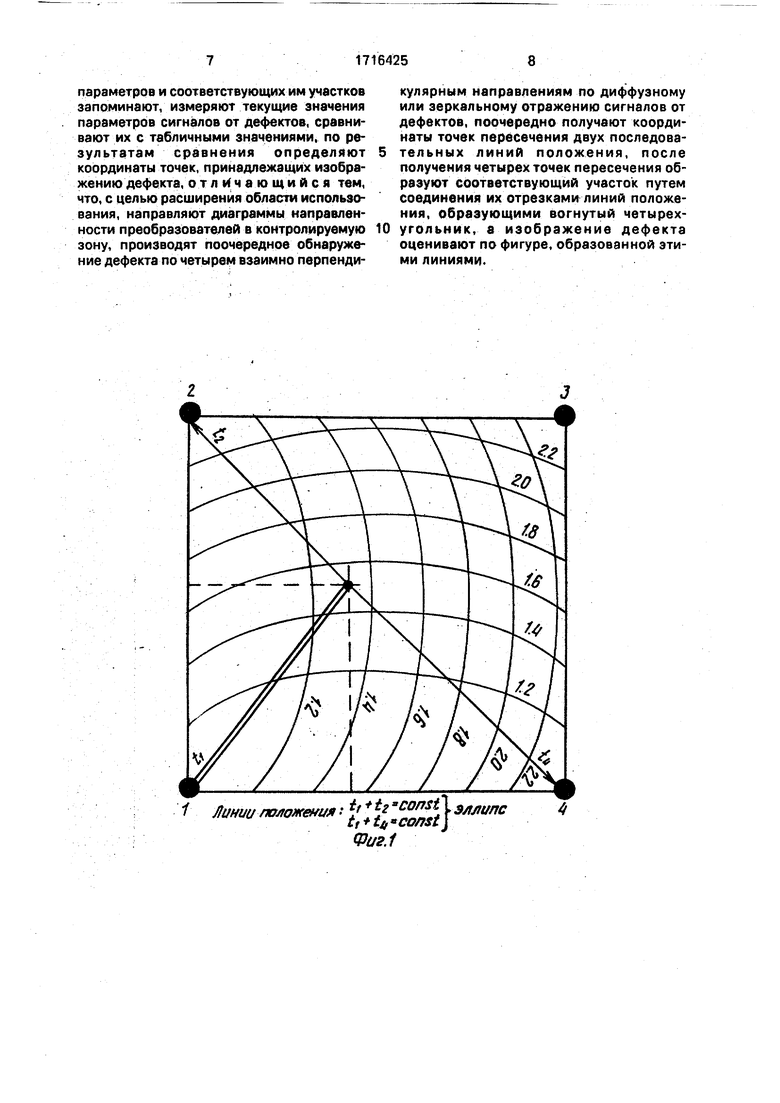
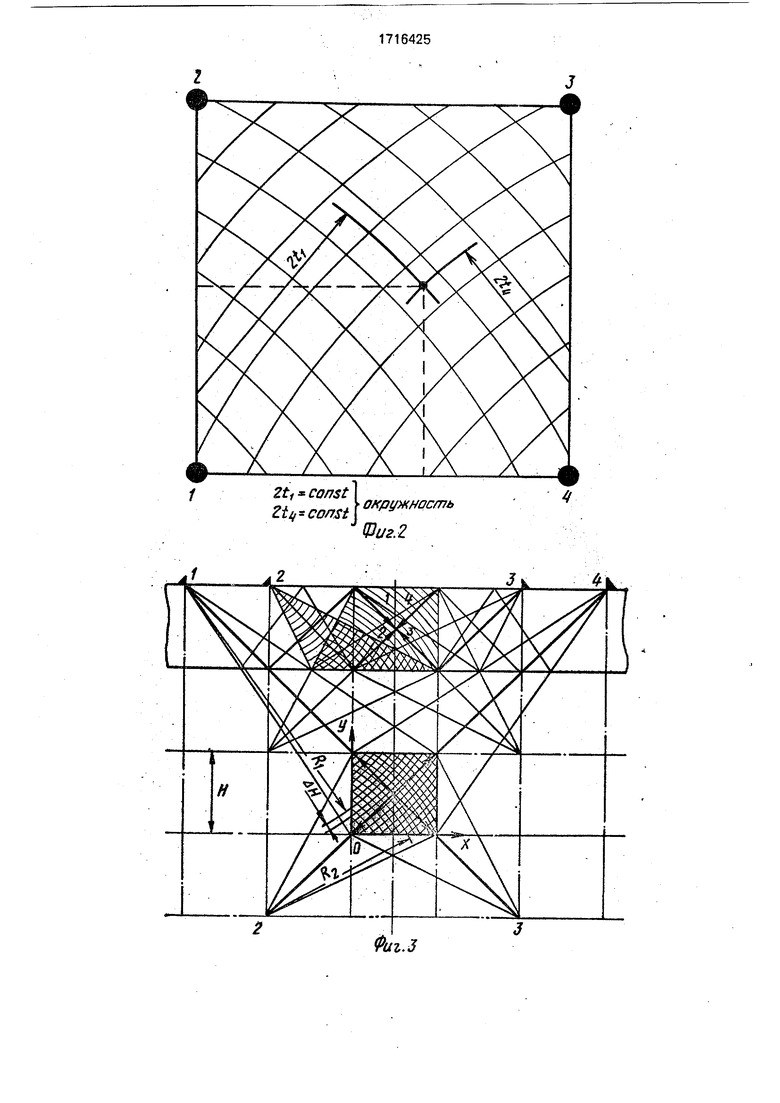
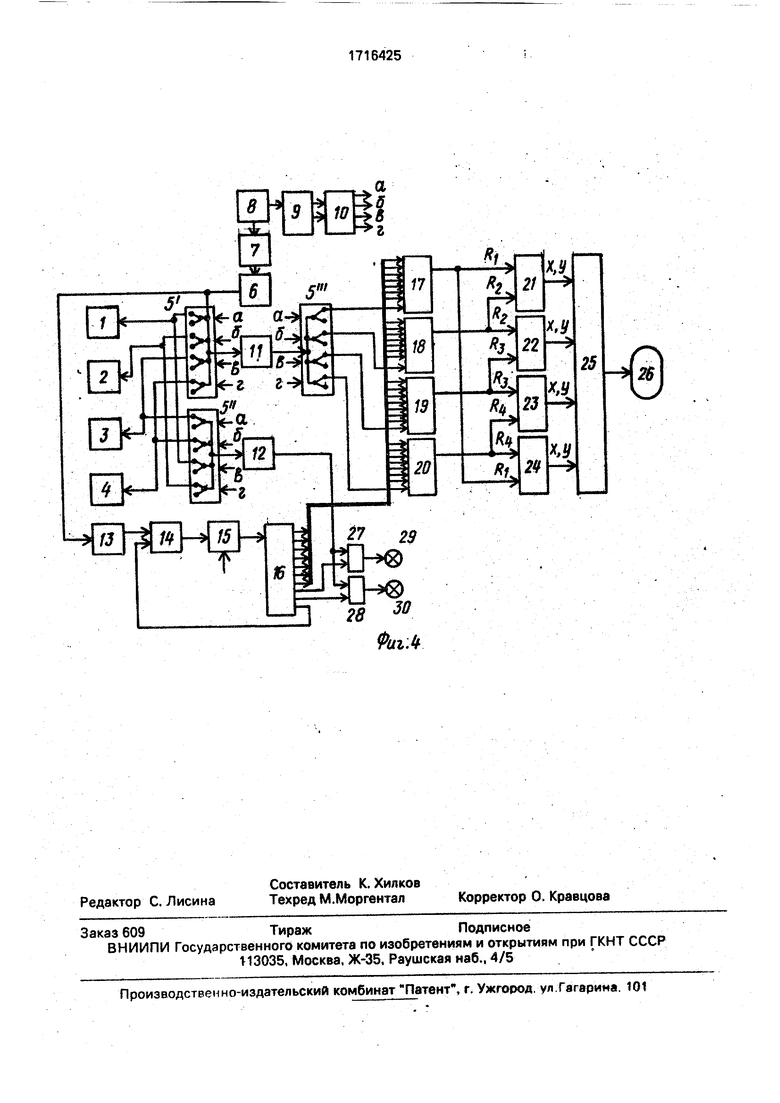
На фиг. 1 представлены линии положения дефекта при зеркальном эхо-методе контро.ля; на фиг.2 -то же, при диффузном эхо-методе контроля; на фиг.З - схема озвучивания контролируемой зоны сварного стыкового соединения при диффузном эхо-методе контроля: на фиг.4- структурная схема устройства -для реализации способа
восстановления изображения дефектов при акустическом контроле.
В устройстве, реализующем способ, четыре преобразователя 1-4 соединены через Секцию коммутатора 5 с генератором 6 зондирующих импульсов, который запускающим входом соединен через первую линию 7 задержки с первым выходом синхронизатора 8. Второй выход синхронизатора 8 соединен со счетным входом четырехразрядного счетчика 9, выходы которого соединены с входами дешифратора 10, имеющего четыре раздельные выхода; эти выходы соединены с управляющими входами трех секций коммутатора 5. Между первой и второй секциями коммутатора 5 включен усилитель 1Ч эхо-сигналов, а выход второй секции коммутатора 5 соединен с
О
кэ ел
усилителем 12 теневых сигналов. Выход генератора 6 зондирующих импульсов соединен также со второй линией 13 задержки, задержка которой равна удвоенной задержке акустических сигналов в призме преобра- зователей 1-4. Выход второй линии 13 задержки соединен с установочным входом триггера 14. а выход триггера 14 соединен с входом регулируемого генератора 15 тактовой частоты, выход которого соединен с вхо- дом многоразрядного делителя 16 частоты. Выходы первых К разрядов делителя 16 частоты соединены с информационными входами четырех ОЗУ 17-20, записывающие входы которых соединены с выходами второй секции коммутатора 10. Многоразрядные выходы ОЗУ 17-20 соединены с входами четырех ПЗУ 21-24 так, что входы каждого ПЗУ 21-24 соединены с выходами двух соседних ОЗУ 17-20.
Многоразрядные выходы ПЗУ 21-24 через мультиплексор 25 соединены с дисплеем 26. Выход усилителя 12 теневых сигналов соединен с первыми входами первой и второй схем 27 и 28 совпадения. Вторые входы первой и второй схем 27 и 28 совпадения соединены с прямым выходом К+1 .разряда делителя 16 частоты и с инверсным выходом К+2 разряда делителя 16частоты; их выходы соединены соответственно с первой и вто- рой сигнальными лампочками 29 и 30.
Способ восстановления изображения дефектов при акустическом контроле осуществляют следующим образом.
Например, осуществляют контроль сварного стыкового соединения листов. Озвучивание осуществляют при помощи четырех наклонных преобразователей 1-4 с углами ввода 45о. Преобразователи располагают симметрично относительно оси сварного соединения, образуя две пары встречно направленных преобразователей 1-4, сдвинутых один относительно другого на один ход центрального луча в листе данной толщины. Каждая из двух пар преобра- зователей 1-4 может пропускать акустические сигналы поочередно в двух направлениях, изменяя у двух преобразователей функции излучателя и приемника ультразвука. Прошедшие теневые сигналы используют для точной настройки частоты дискретизации времени прохождения акустических сигналов между преобразователем и дефектом в зависимости от толщины листа.
На развертке лучей, направленных из четырех центров излучения, образуют квадрат с диагональю, равной одному ходу центрального луча. На этот квадрат условно накладывают четыре сетки из линий положения, которыми являются окружности, проведенные из центров, совпадающих с точками ввода четырех преобразователей 1-4.
Первая сетка из линий положения соответствует излучению ультразвука из 1-й и 2-й точек ввода, вторая сетка - из 2-й и 3-й точек ввода, третья сетка - из 3-й и 4-й точек ввода и четвертая сетка - из 4-й и 1-й точек ввода. Линии положения - это геометрические места равных задержек сигналов, являющиеся окружностями при равных во всех направлениях скоростях распространения ультразвука.
В прямоугольной системе координат с началом в нижнем левом углу квадрата линии положения для четырех центров излучения будут описываться следующими уравнениями:
X2 + Y2 + 4H X-6H Y+ 13H2-Ri2 0;
Х2 + У2 + 2НХ + 2Н У + 2Н2 - Ra2 0;
X2 + Y2 - 4Н X + 2Н У + 5Н2 - R32 0;
X2 + Y2 - 6Н X - 6Н У + 18Н2 - R42 - О, где Н - толщина контролируемых листов;
Ri; Ra; Ra; R4 - дальности отражающих поверхностей дефектов от точек ввода соответствующих преобразователей;
X и У - координаты точек в прямоугольной системе координат.
Эти уравнения решают совместно и попарно в соответствии со схемами четырех указанных сеток, получают алгоритмы преобразования натуральных координат, которыми являются измеряемые в цифровом виде задержки сигналов, в прямоугольные координаты дисплея 26. Для каждой сетки получают пару уравнений отдельно для X и для У, вычисляемые через пары натуральных координат. Заранее вычисленные преобразования координат записывают в ПЗУ 21-24.
Приведены алгоритмы преобразования координат для четырех ПЗУ 21-24.
«№№&- №(1 ъ №-&&,ЈЈ -1 -«$ал- ,f)t-()lJ.-w,
))г-.тг)Т: )Ч
)H;
где щ, П2, пз, П4 - цифровые значения задержек сигналов в соответствующих акустических каналах, отсчитываемые от углов квадрата, образующего кадр дисплея 26.
АН - шаг дискретизации диагонали квадрата;
Н Дц число дискретов в диагонали
квадрата (это число удобно брать равным 2k, где к - число разрядов двоичного счетчика 9, с которого считывается код текущей координаты дефекта).
Эти алгоритмы переводят на язык программы для соответствующих ЭВМ, по которым рассчитываются таблицы, входными данными которых являются натуральные координаты, а выходными - прямоугольные координаты дисплея. Эти таблицы записывают в ПЗУ 21-24 для четырех пар натуральных координат.
Синхронизатор 8 вырабатывает импульсы, следующие с частотой, которая в четырех раза больше частоты коммутации каналов и равна частоте зондирования. Эти импульсы, пройдя первую линию 7 задерж- ки, запускают генератор 6 зондирующих импульсов. С другой стороны импульсы той же частоты поступают на четырехразрядный счетчик 9 и с него на дешифратор 10, на выходах которого последовательно образу- юте я импульсные напряжения, которыми запитываются управляющие катушки герко- новых реле а, б, в и г.
Одновременно каждая катушка включает нормально открытые контакты трех реле, каждое из которых входит в состав трех разных секций коммутатора 5. Зондирующие импульсы, подаваемые в первую секцию коммутатора 5, по четыре раза провходят на каждый из четырех преобра- зователей и через эти же контакты обратно проходят на усилитель 11 эхо-сигналов, которые далее через контакты третьей секции коммутатора 5 уже усиленными проходят на записывающие входы ОЗУ 17-20.
В это же время через контакты второй секции коммутатора 5 проходят теневые сигналы от преобразователей 1-4, расположенных встречно с возбуждаемым (1-3,2-4, 3-1 и 4-2), которые усиливаются в усилителе 12 теневых сигналов и поступают на две схемы совпадения. Выходы схем совпадения запитывают сигнальные лампочки 19 и 20, по которым оператор производит настройку частоты генератора 15 тактовой ча- стоты.
В результате того, что момент стыковки прямого выхода k+1-го и инверсного выхода k+2-го разрядов совмещается с моментом прихода теневых сигналов по признаку загорания обеих лампочек 19 и 20, что достигается регулированием частоты генератора 15 тактовой частоты, то каждый из четырех периодов, соответствующих одному ходу луча между встречно направленными преобразователями1-4,будет дискретизироваться на k частей. Какое-либо стробирование эхо-сигналов не требуется, так как преждевременно поступающие сигналы будут перезаписаны, т.е. стерты теми сигналами, которые придут позже. Изменять характер записываемой информации можно лишь регулированием уровня дискриминации эхо-сигналов.
После переключения коммутатора 5 информация хранится в ОЗУ 17-20 следующего цикла работы этого канала. С двух соседних по времени ОЗУ 17-20 информация поступает на вход ПЗУ 21-24, где преобразуется в выходы соответствующих прямоугольных координат X и Y, которые мгновенно отображают точку на экране дисплея 26. Затем происходит включение следующей пары преобразователей 1-4, озвучивающих дефект под другим ракурсом, и отображение следующей точки, принадле- жащей дефекту. Всегр каждый дефект будет отображаться четырьмя точками, соответствующими точкам пересечения четырех линий положения, каждая из которых проходит через наиболее характерную, светящуюся точку поверхности дефекта. Если провести отрезки линий положения между точками их пересечения, то образовавшаяся фигура будет охватывать дефект как бы касательными к его поверхности, вогнутыми внутрь. Получаемые фигуры вполне могут служить для расшифровки характера дефектов и измерения их характерных размеров.
Таким образом предлагаемый способ позволяет расширить область применения путем озвучивания контролируемой зоны во взаимно перпендикулярных направлениях и оценке изображения дефекта по фигуре, образованной отрезками соответствующих линий положения.Формула изобретения
Способ восстановления изображения дефектов при акустическом контроле, заключающийся .в том, что располагают акустические преобразователи по периферии контролируемой зоны, наносят в контролируемой зоне с заданным шагом дискретности измеряемого параметра сигнала линии положения дефектов относительно преобразователей, определяют значения параметров сигналов для участков, ограниченных пересекающимися линиями положения, полученную таблицу значений
параметров и соответствующих им участков запоминают, измеряют текущие значения параметров сигналов от дефектов, сравнивают их с табличными значениями, по результатам сравнения определяют координаты точек, принадлежащих изображению дефекта, о т лишающийся тем, что, с целью расширения области использования, направляют диаграммы направленности преобразователей в контролируемую зону, производят поочередное обнаружение дефекта по четырем взаимно перпенди0
кулярным направлениям по диффузному или зеркальному отражению сигналов от дефектов, поочередно получают координаты точек пересечения двух последовательных линий положения, после получения четырех точек пересечения образуют соответствующий участок путем соединения их отрезками линий положения, образующими вогнутый четырехугольник, а изображение дефекта оценивают по фигуре, образованной этими линиями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 1994 |
|
RU2104519C1 |
| Ультразвуковой дефектоскоп для контроля сварных швов | 1986 |
|
SU1388786A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ЭКВИДИСТАНТНЫМИ ПОВЕРХНОСТЯМИ | 2020 |
|
RU2725705C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2005 |
|
RU2309402C2 |
| Устройство для формирования видеосигнала | 1990 |
|
SU1741124A1 |
| Устройство для контроля печатных плат | 1986 |
|
SU1472929A1 |
| Многоканальное устройство для определения координат множества одновременно действующих источников акустических сигналов | 1984 |
|
SU1201753A1 |
| Способ ультразвукового контроля изделий | 2016 |
|
RU2622459C1 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
Изобретение относится к неразрушающему контролю и может быть использов ано . ; . . .2-.. для получения изображения дефектов при акустическом контроле, основанном на явлении диффузного или зеркального отражения сигналов от дефектов. Целью изобретения является расширение области применения за счет использования при зеркальном и теневом акустических методах контроля. Заранее рассчитывают значения параметров акустических сигналов, соответствующих различным участкам контролируемой зоны, образованным линиями положения дефектов. Озвучивают зону с четырех взаимно перпендикулярных направлений, сравнивают параметры сигналов с расчетными и оценивают изображение дефекта по четырем точкам его поверхности. 4 ил. Ё
- ««««f ;g;«g} «wr
Фиг.1
2t const Zt4 const
окружность Шиг.2
Фиг.З
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КАЧЕСТВА СВАРНЫХ ШВОВ | 0 |
|
SU211857A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М.: Атомиздат, 1980, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
