(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| Устройство для управления землесосным снарядом | 1989 |
|
SU1677196A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1717742A1 |
| Система для управляемого обрушения подводных забоев земснарядом | 1990 |
|
SU1789608A1 |
| Способ контроля степени износа грунтового насоса земснаряда | 1990 |
|
SU1787896A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Устройство для программного регулирования температуры | 1987 |
|
SU1566320A2 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Устройство для управления землесосным снарядом | 1987 |
|
SU1437486A2 |
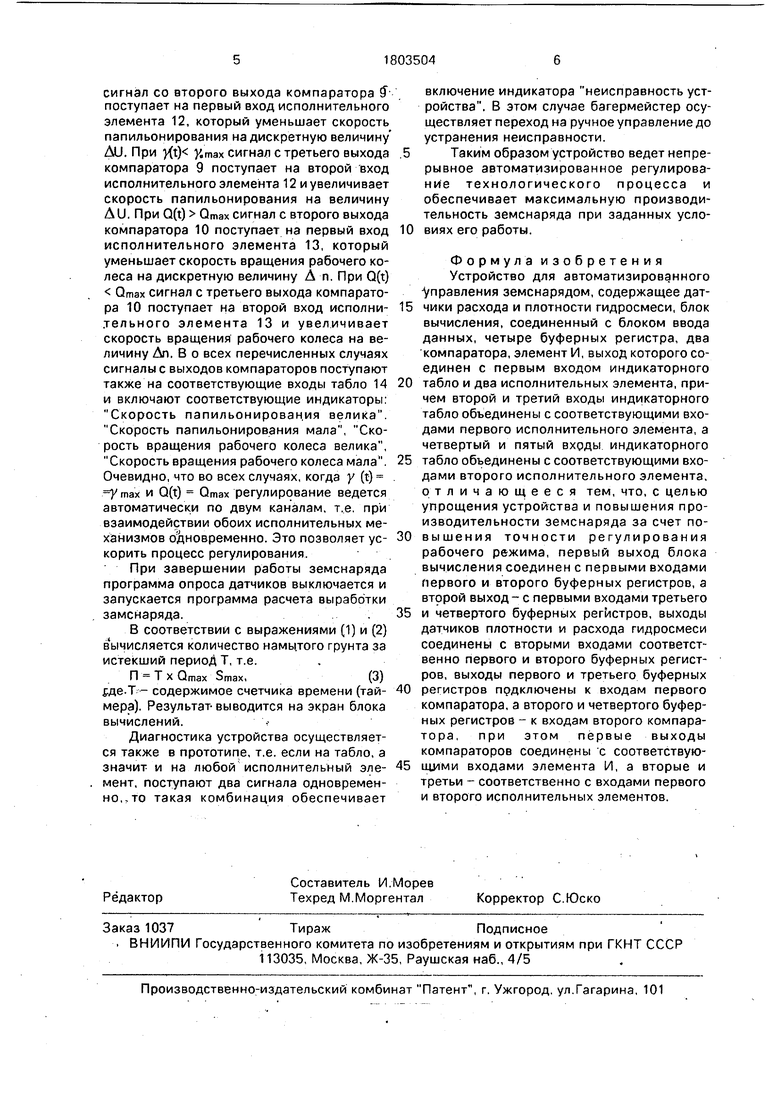
Устройство содержит: блок ввода данных 1, блок вычисления 2, датчик плотности гидросмеси 3, датчик плотности гидросмеси 4, буферные регистры 5,6,7,8, компараторы 9,ip, элемент И 11, исполнительные элементы 12,13i. индикаторные табло 14. 1 ил.
00
о
СА) СЛ
g
Изобретение относится к гидромеханизации, а именно к устройствам для автома- тизации землесосных снарядов, используемых в транспортном строительстве и других отраслях народного хозяйства.
Целью изобретения является упрощение устройства и повышение производительности земснаряда за счет повышения точности регулирования рабочего режима.
На чертеже представлена функциональная схема устройства.
Устройство содержит блок 1 ввода данных, блок 2 вычисления, датчики 3 и 4 плотности и расхода гидросмеси, буферные регистры 5,6,7 и 8, компараторы 9 и 10, элемент И 11, исполнительные элементы 12 и 13 и табло 14.
Выходы датчиков 3 и 4 соединены шинами данных с информационными входами буферных регистров 5 и 8 соответственно. Управляющие входы этих регистров (запись) соединены с управляющим выходом блока вычисления 2, информационный вход и информационный выход которого соединены с блоком ввода данных 1 и буферными регистрами 6 и 7 соответственно. Информационные выходы регистров 5 и 8 соединены с первыми информационными входами компараторов 9 и 10, а их вторые информацион- ные входы соединены с информационными выходами регистров 6 и 7 соответственно. Первые управляющие выходы компараторов соединены с входами элемента И 11, выход которого соединен с первым входом табло 14. Вторые управляющие выходы компараторов 9 и 10 соединены с первыми входами исполнительных элементов 12 и 13 соответственно, а также с вторым и третьим входами табло. Третьи управляющие выходы компараторов 9 и 10 соединены с вторыми входами исполнительных элементов 12 и 13 соответственно, а также с четвертым и пятым входами табло. Оно содержит индикаторы Нормальный режим, Скорость па- пильонирования велика, Скорость вращения рабочего колёса велика, Скорость папильонирования мала и Скорость вращения рабочего колеса мала соединенные с первым, вторым, третьим, четвертым и пятым входами соответственно, а также индикатор Неисправность устройства, которые соединен со всеми входами табло через дешифратор кода. Датчики выполнены по схемам прототипа с тем отличием, что АЦП содержит внутренний тактовый генератор. Блок вычисления, блок вводи данных, буферные регистры, компараторы и испрл- нительные элементы не отличаются от приведенных в прототипе.
0
5
0
5
0
5
0
5
0
5
Программное обеспечение устройство содержит следующие прикладные программы:.
1) расчет рабочих параметров Qmax и
Утах,
2) пересылка рабочих параметров в буферные регистры констант;
3) опрос датчиков (таймер);
4) расчет выработки замснаряда за истекший период времени.
Устройство работает следующим образом. Перед началом технологического процесса входные данные записываются в блок вычисления 2 с помощью блока ввода данных 1 и затем запускается программа расчета рабочих параметров. Входами данными для расчета, как и в прототипе, являются характеристики грунта, размеры всасывающего и напорного трубопроводов, глубина разработки, высота подачи грунта, технические характеристики грунтового насоса и др. Блок 2 рассчитывает рабочие параметры Углах и Qmax, которые затем пересылаются в буферные регистры констант 6 и 7 соответственно. Информация в этих регистрах не изменяется до получения нового варианта расчета. Затем опускается рама грунтоза- борного устройства земснаряда, система заполняется водой, включается грунтовый насос и запускается программа опроса датчиков 3 и 4. В результате работы этой программы таймер (программный и аппаратный) блока 2 вырабатывает тактовые импульсы с заданным временным интервалом. Эти импульсы с выхода блока вычисления поступают на входы Запись регистров 5 и 8 и обеспечивают запись показаний датчиков 3 и 4 в указанные регистры. При этом в регистр 5 записывается текущее значение плотности гидросмеси y(t), а в регистр 8 - текущее значение расхода гидросмеси Q(t). Домпараторы 9 и 10 выполняют операцию сравнения чисел у (t) с Утах и Q(t) с Qmax соответственно. При этом возможно шесть cvrryam tu:y(t) y max,y(t)
Утах, У (t) Углах, Q(t) Qmax, Q (t) Qmax И
Q(t) Qmax, различные сочетания которых образуют 9 комбинаций.
Устойчивая работа земснаряда с максимальной производительностью обеспечивается КОМбинаЦИейу (t) у max И Q(t) Qmax.
При этом сигналы с первых выходов компараторов 9 и 10 поступают на входы элемента И 11. Сигнал с выхода этого элемента поступает на табло 14 и включает индикатор Нормальный режим. Во всех других случаях в процессе работы вырабатываются сигналы неравенства измеренных и вычисленных значений, а именно: приуМ Утах.
сигнал со второго выхода компаратора JT- поступает на первый вход исполнительного элемента 12, который уменьшает скорость папильонирования на дискретную величину AU. При Xt) y.max сигнал с третьего выхода компаратора 9 поступает на второй вход исполнительного элемента 12 и увеличивает скорость папильонирования на величину Ди. При Q(t) Qmax сигнал с второго выхода компаратора 10 поступает на первый вход исполнительного элемента 13, который уменьшает скорость вращения рабочего колеса на дискретную величину An. При Q(t) Qmax сигнал с третьего выхода компаратора 10 поступает на второй вход исполнительного элемента 13 и увеличивает скорость вращения рабочего колеса на величину An. В о всех перечисленных случаях сигналы с выходов компараторов поступают также на соответствующие входы табло 14 и включают соответствующие индикаторы: Скорость папильонирования велика. Скорость папильонирования мала, Скорость вращения рабочего колеса велика, Скорость вращения рабочего колеса мала. Очевидно, что во всех случаях, когда у (t) Утах и Q(t) Qmax регулирование ведется автоматически по двум каналам, т.е. при взаимодействии обоих исполнительных механизмов одновременно. Это позволяет ускорить процесс регулирования.
При завершении работы земснаряда программа опроса датчиков выключается и запускается программа расчета выработки замснаряда.
В соответствии с выражениями (1) и (2) вычисляется количество намытого грунта за истекший период Т, т.е.
П Т X Qmax Smax,(3)
&це.Т - содержимое счетчика времени (таймера). Результат-выводится на экран блока вычислений.
Диагностика устройства осуществляется также в прототипе, т.е. если на табло, а значит и на любой исполнительный элемент, поступают два сигнала одновременно,, то такая комбинация обеспечивает
включение индикатора неисправность устройства. В этом случае багермейстер осуществляет переход на ручное управление до устранения неисправности.
Таким образом устройство ведет непрерывное автоматизированное регулирование технологического процесса и обеспечивает максимальную производительность земснаряда при заданных условиях его работы.
Формула изобретения Устройство для автоматизированного управления земснарядом, содержащее датчики расхода и плотности гидросмеси, блок вычисления, соединенный с блоком ввода данных, четыре буферных регистра, два компаратора, элемент И, выход которого соединен с первым входом индикаторного
табло и два исполнительных элемента, причем второй и третий входы индикаторного табло объединены с соответствующими входами первого исполнительного элемента, а четвертый и пятый входы индикаторного
табло объединены с соответствующими входами второго исполнительного элемента, отличающееся тем, что, с целью упрощения устройства и повышения производительности земснаряда за счет повышения точности регулирования рабочего режима, первый выход блока вычисления соединен с первыми входами первого и второго буферных регистров, а второй выход- с первыми входами третьего
и четвертого буферных регистров, выходы датчиков плотности и расхода гидросмеси соединены с вторыми входами соответственно первого и второго буферных регистров, выходы первого и третьего буферных
регистров подключены к входам первого компаратора, а второго и четвертого буферных регистров - к входам второго компара- тора, при этом первые выходы компараторов соединены с соответствующими входами элемента И, а вторые и третьи - соответственно с входами первого и второго исполнительных элементов.
| Устройство для управления землесосным снарядом | 1984 |
|
SU1258959A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
