Изобретение относится к аналоговой вычислительной технике.
Известны устройства для преобразования декартовых координат в полярные.
В устройстве, содержащем два блока умножения, вырабатывающих проекции Xcos 0 и Ysln в входных координат, которые после суммирования образуют полярный радиус, применяется метод неявной функции, а именно величина полярного ра- диуса заводится на входы блоков деления и используется для формирования указанных проекций.
Наиболее близким к предлагаемому является устройство, содержащее два блока ум- ножения и два сумматора. Сигналы, выработанные на выходе блоков умножения суммируются нз сумматоре и образуют значение полярного радиуса. На выходе второго сумматора вырабатывается сигнал, соответ- ствующий значению полярного угла 0.
Недостаток устройств заключается в необходимости применения для вычисления значения полярного угла в нелинейных преобразователей для вычисления обрат- ных тригонометрических функций и, как следствие, сложность и невысокая точность вычисления.
Целью изобретения является повышение точности вычисления и расширение функциональных возможностей устройства за счет получения значения полярного угла.
В устройство, содержащее первый и второй умножители и первый и второй алгебраические сумматоры, первый и второй неинвертирующие входы первого алгебраического сумматора подключены к выходам первого и второго умножителей, первый, второй и третий неинвертирующие входы второго сумматора подключены соответст- венно к выходам первого и второго умножителей и к выходу первого алгебраического сумматора, введены третий и четвертый умножители и третий алгебраический сумматор, выход которого является выходом устройства, первый вход третьего алгебраического сумматора соединен с первым входом четвертого умножителя и выходом второго алгебраического сумматора, а второй вход подключен к выходу четвертого умножителя, первый и второй входы первого умножителя объединены и подключены к входу задания косинуса вычисляемого полярного угла и к четвертому инвертирующему входу-второго алгебраического сумматора, первый и второй входы второго умножителя, объединены и подключены, к третьему входу второго алгебраического сумматора и к выходу первого алгебраического сумматора, третий вход которого соединен с шиной опорного напряжения; первый и второй входы третьего умножителя подключены соответственно к выходам первого алгебраического сумматора и к входу задания косинуса вычисляемого полярного угла устройства, выход третьего умножителя соединен с вторым входом четвертого умножителя.
На чертеже представлена структурная схема устройства.
Устройство содержит информационный вход 1, первый 2, второй 3, третий 4 и четвертый 5 умножители, первый б, второй 7 и третий 8 алгебраические сумматоры. Выход 9 третьего алгебраического сумматора 8 является выходом устройства.
Устройство работает Следующим образом,
На информационный вход 1 устройства подается напряжение, соответствующее значению X в декартовых координатах. На выходах первого 2 и второго 3 умножителей вырабатываются сигналы Xcos 0 cos2 &w Ysin 0 соответственно. Сигнал на выходе первого алгебраического сумматора 6 соответствует значению Y 1-х2. Сигнал на выходе второго алгебраического сумматора 7 соответствует известной эмпирической зависимости
0 К (0) cos2 в - (ж/2 - К (0)) sin2 в + + К(0) Sin в - К(0) COS 0.
0)
Третий алгебраический сумматор реализует эмпирическую зависимость
в - (1 - a sin 2 в) cos2 в - (я/2 +-а sin 2 в -1) sin2 в + + (1 -a sin 29)sin 0- -(1 - a sin 20) cos 0.
На выходе 9 третьего алгебраического сумматора вырабатывается сигнал, соответствующий значению полярного угла 0. Вычисление значения полярного угла 0 по формуле (2) позволяет получить значение 0р , достаточно точно приближенное к идеальному значению полярного угла 0ид- Максимальная методическая погрешность Д0макс в данном случае не превышает 0,008%, что значительно точнее, чем при вычислении значения полярного угла 0по известной методике.
Изобретение позволяет простыми средствами без применения тригонометрических преобразователей осуществлять преобразование декартовых координат и вычисление значения полярного угла, по- строить устройство в виде сопроцессора, что определяет технико-экономический эффект от его использования.
Формула изобретения
Устройство для вычисления полярного угла, содержащее первый и второй умножители и первый и второй алгебраические сумматоры, первый и второй неинвертирующие входы первого алгебраического сумматора подключены к выходам первого и второго умножителей, первый, второй и третий неинвертирующие входы второго сумматора подключены соответственно к выходам пер- вого и второго умножителей и к выходу первого алгебраического сумматора, от л и чающееся тем, что, с целью повышения точности, в него введены третий и четвертый умножители и третий алгебраический
сумматор, выход которого является выходом устройства, первый вход третьего алгебраического сумматора соединен с первым входом четвертого умножителя и выходом второго алгебраического сумматора, а второй вход подключен к выходу четвертого умножителя, первый и второй входы первого умножителя объединены и подключены к входу задания косинуса вычисляемого, полярного угла и к четвертому инвертирующему входу второго алгебраического сумматора, первый и второй входы второго умножителя объединены и подключены к третьему входу второго алгебраического сумматора и кчвыходу первого алгебраического сумматора, третий вход которого соединен с шиной опорного напряжения, первый и второй входы третьего умножителя подключены соответственно к выходам первого алгебраического сумматора и к входу задания косинуса вычисляемого полярного угла, выход третьего умножителя соединен с вторым входом четвертого умножителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования изображения при коническом сканировании | 1989 |
|
SU1734233A1 |
| Устройство для определения положения основания транспортного средства относительно земной поверхности | 1991 |
|
SU1812425A1 |
| Устройство управления положением диаграммы направленности антенны подвижного объекта | 1990 |
|
SU1805451A1 |
| СПОСОБЫ И УСТРОЙСТВА ПОВЫШЕНИЯ ИНДЕКСА УГЛОВОЙ МОДУЛЯЦИИ | 2012 |
|
RU2493646C2 |
| Устройство для преобразования координат | 1983 |
|
SU1141405A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ МАТРИЦЫ НАПРАВЛЯЮЩИХ КОСИНУСОВ | 1991 |
|
RU2037192C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ КОРРЕКЦИИ УГЛА КРЕНА И КОРРЕКТОР УГЛА КРЕНА | 2007 |
|
RU2362108C2 |
| БОРТОВОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1991 |
|
RU2027200C1 |
| Анализатор спектра | 1983 |
|
SU1195356A1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1993 |
|
RU2077029C1 |
Изобретение относится к аналоговой вычислительной технике и может быть использовано для преобразования декартовых координат и вычисления значения полярного угла. Целью изобретения является повышение точности вычисления и расширение функциональных возможностей устройства за счет получения значения полярного угла. Устройство содержит четыре 2-5 умножителя и три 6-8 алгебраических сумматора. 1 ил.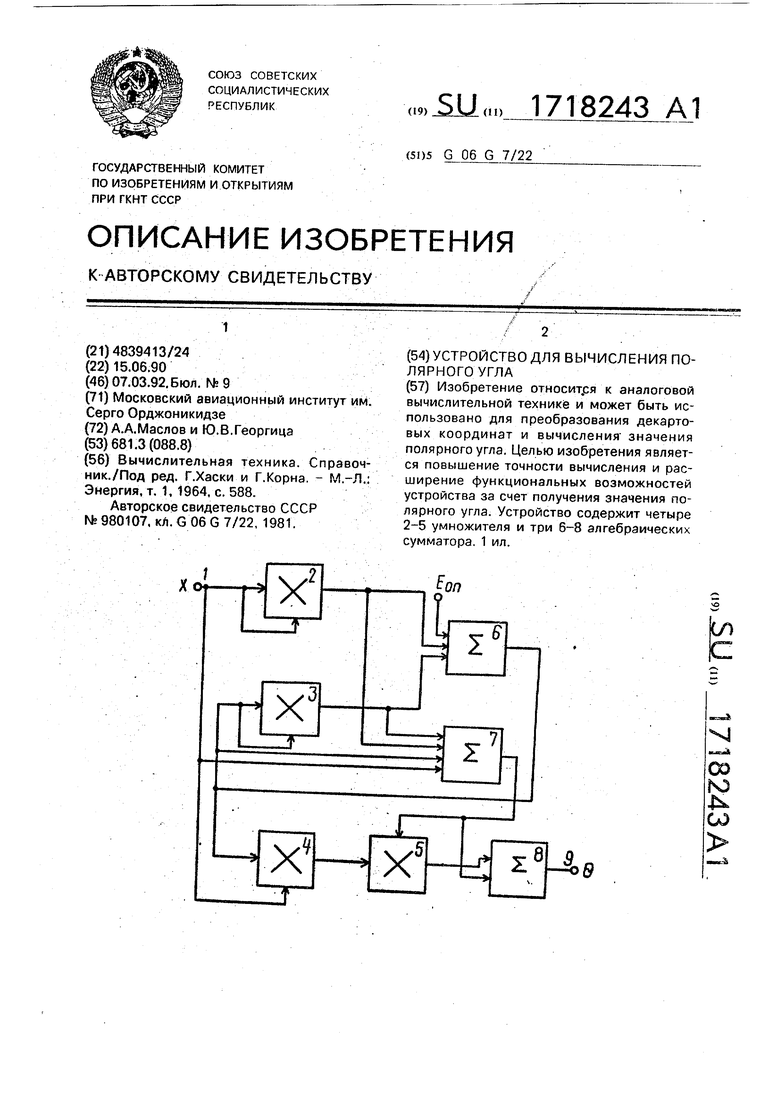
| Вычислительная техника | |||
| Справоч- ник./Под ред | |||
| Г.Хаски и Г.Корна | |||
| - М.-Л..: Энергия, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Искроудержатель для паровозов | 1920 |
|
SU588A1 |
| Устройство для преобразования декартовых координат | 1981 |
|
SU980107A1 |
