Изобретение относится к автоматизации процесса вакуумирования стали в ваку умных установках порционного типа и может быть использовано при исследовании процессов вакуумирования в сталеплавильном производстве для различных марок сплавов.
Цель изобретения - обеспечение оперативного и достоверного контроля при кажг дом цикле вакуумирования.
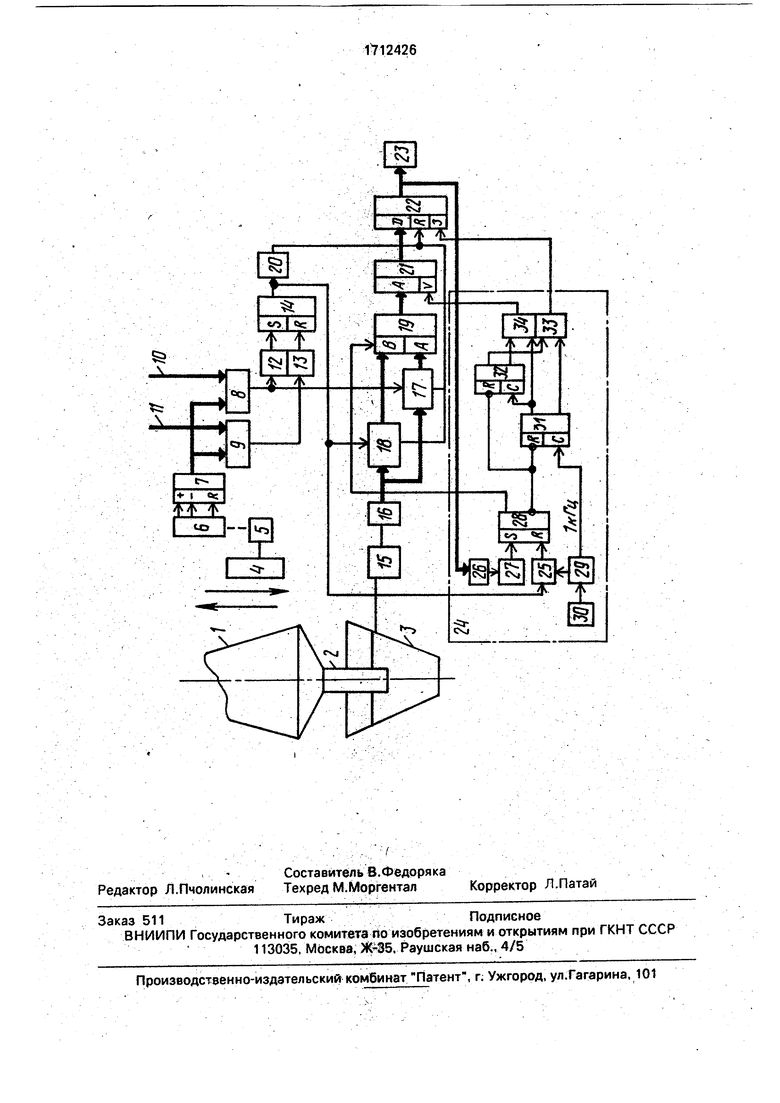
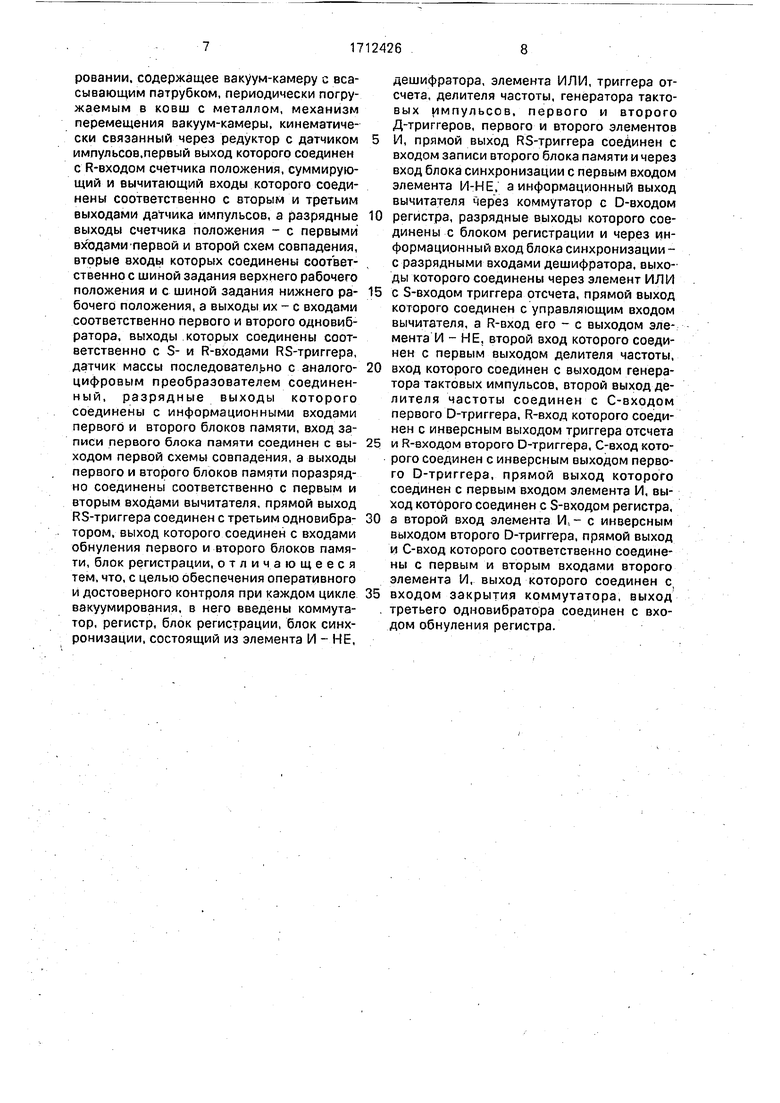
На чертеже приведена блок-схема устройства.
Устройство контроля скорости заполнения вакуум-камеры металлом при вакуу|и|ирования содержит вакуум-камеру 1 с
всасывающим патрубком 2, периодически погружаемым в ковш 3 с металлом, механизм 4 перемещения вакуум-камеры, кинематически связанный через редуктор 5 с датчиком 6 импульсов, первый выход которого соединен с R-входом счетчика 7 положения, суммирующий (+) и вычитающий (-) входы которого соединены соответственно с вторым и третьим выходами 6 импульсЬв, а разрядные выходы счетчика 7 положения - с первЪ1ми входами первой 8 и второй 9 схем совпадения, вторые входы которых соединены соответственно с шиной 10 задания верхнего рабочего положения и шиной 11 задания нижнего рабочего положения, а
их выходы - с входами соответственно первого 12 и второго 13 одновибратора, выходы которых соединены соответственно с S- и R-входами RS-триггера 14, и датчик 15 массы, последовательно соединенный с аналого-цифровым преобразователем 16, разрядные выходы которого соединены с информационными входами первого и второго блоков 17 и 18 памяти, вход записи первого блока 17 памяти соединен с выходом первой схемы 8 совпадения, выходы блоков 17 и 18 памяти поразрядно соединены соответственно с первым и вторым входами вычитателя 19, а прямой выход RS-триггера 14 соединен с третьим одновибратором 20..
В устройство дополнительно введены коммутатор 21/регистр 22. блок 23 регистрации и блок 24 синхронизации, состоящий из элемента И - НЕ 25, дешифратора 26, элемента ИЛИ 27, триггера 28 отсчета, делителя 29 частоты, генератора 30 тактовых импульсов, первого 31 и второго D-триггеров 32, а также первого 33 и второго 34 элементов. Прямой выход RS-триггера 14 соединен с входом записи второго блока 18 памяти и через вход блока 24 синхронизаЦии с первым входом элемента И - НЕ 25. Информационнь1й выход вычитателя 19 соединен через коммутатор 21 с D-входом регистра 22-, разрядное выходы; которого соединены с блоком 23 регистрации и через информационный вход блока 24 синхронизации-с разрядными входами дешифратора 25, выходы которого через элемент ИЛИ 27 соединень с S-входом триггера 28 отсчета, прямой выход которого соединен с вторым входом первого элемента И 38, R-вход - с первым выходом делителя 29 частоты, вход которого подключен к выходу генератора.30 тактовых импульсов. Второй выход делителя 29 частоты соединен с С-входом первого Д-триггера 31, R-вход которого соединен с инверсным выходом триггера 28 отсчета и R-входом второго D-триггера 32, С-вход которого соединен с инверсным выходом первого D-триггера 31, прямой выход которого соединен с первым входом первого элемента И 33, выход которого соединен с S-входом регистра 22, а второй вход первого элемента И 33 -с инверсным выходом второго D-триггера 32. прямой выход и Свход которого соответственно соединены с первым и вторым входами второго элемента И 34, вь1ход которого соединен с входом закрытия коммутатора 21, а выход третьего одновибратора 20 - с входами обнуления блоков 17 и 18 памяти и регистра 22.
Устройство работает следующим образом.
Перед началом процесса вакуумирования вакуум-камеру 1 с всасывающим патрубком 2 из исходного положения опускают в ковш 3 с металлом при помощи механизма
4 перемещения вакуум-камеры, который через редуктор 5 кинематически связан с. датчиком В импульсов. Настройка механизма 4 производится в ручном режиме перемещением вакуум-камеры путем установки датчика 6 так, что по R-входу счетчик 7 положения устанавливается в О. В этот момент торец патрубка 2 входит в мрталл, а счетчик 7 положения на разрядных выходах имеет нулевой код,
5 При продолжении опускания вакуум-камеры с всасывающим .патрубком 2 в ковш 3 с металлом на втором и третьем выходах датчика 6 перемещения формируются сигналы, которые поступают на суммирующий
0 (+) и вычитающий (-) входы счетчика 7 положения..
На разрядных выходах последнего вырабатывается код, пропорциональный величине перемещения вакуум-камеры 1 с
5 всасывающим .патрубком 2. Сформированный на выходах счетчика 7 положения код поступает на первые входы схем 8 и 9 совпадения. На вторые входы этих схем совпадения по 10 и 11 задания поступают
0 сигналы верхнего и нижнего рабочих положений. Это задание может поступать либо непосредственно от АСУ ТП при автоматическом режиме, либо с пульта управления (не показано) в режиме Совет мастеру.
5 По заднему фронту сигналов схем 8 м 9 совпадения одновибраторы 12 и 13 формируют импульсы..
Импульс с выхода первого одновибратора 12 устанавливает RS-триггер 14 в со0 стояние 1.
С выхода датчика 15 массы сигнал, пропорциональный массе брутто ковша с металлом, поступает на вход аналого-цифрового преобразователя 16. где преобразуется в
5 цифровой код.
Перед очередным циклом качания первый и второй блоки 17 и 18 памяти обнуляются.
В начале вакуумирования при достиже0 НИИ торцом патрубка 2 уровня погружения в металл, равного заданному по шине 10 вер: хнему рабочему положению, на выходе первой схемы 8 совпадения формируется сигнал. По переднему фронту этого сигнала
5 измеренная в этот момент начальная масса брутто GI ковша с металлом перезаписыва.ется в первый блок 17 памяти и хранится в нем.
При достижении требуемого разрежения в вакуум-камере 1 патрубок 2 продолжает опускаться в ковш 3 с металлом. С этого момента за счет разности давления в ковше 3 и в вакуум-камере 1 металл из ковша 3 по ходу погружения засасывается через патрубок 2 в вакуум-камеру 1 и заполняетееиижнюю часть.
По ходу погружения торца патрубка 2 в вакуум-камеру поступает только часть металла (порция) из ковша 3, Масса этой порции под действием вакуума отрывается от начальной массы брутто ковша с металлом и датчик 15 массы фиксирует уже новое значение G2 массы брутто ковша с металлом,
С выхода аналого-цифрового преобразователя 16 код массы поступает в блоки 17 и 18 памяти в определенные моменты. По переднему фронту сигнала с прямого выхода RS-триггера 14 в блок 18 памяти записывается значение массы G2.
Вычитатель 19 производит вычитание от величины Gi величины G2 в течение периода, равного, например, 1 с. Полученный результат поступает через коммутатор 20 на вход D-регистра 22, где запоминается и отображается в блоке 23 регистрации.
В начале цикла вакуумирования на входы вычитателя 19 коды значений Gi и G2 массы не поступают. Коммутатор 21 закрыт. Регистр 22 нахо/ ится а нулевом состоянии и блок 23 регистрации отображает это состояние. Синхронизация вычисления обеспечивается блоком 24 синхронизации элементом И - НЕ 25. При этом с выходов регистра 22 через информационные входы блока 24 синхронизации на входы дешифратора 26 поступает код нулевого уровня. На выходе элемента ИЛИ 27 также присутствует сигнал О.
Этим сигналом триггера 28 отсчета устанавливается в единичное состояние.
По этому сигналу открывается вычитатель 19 и значения масс Gi и G2 из блоков 17 и 18памяти поступают на входы вычитателя 19. где от начальной масса Gi вычитается значение массы G2. Эта разность Gi-G2 AG является массой порции металла, поступившего в вакуум-камеру. Вычисление этой порции металла производится за единицу времени, например, 1 с.
По окончании времени, равного Тс от начала вычисления порции металла, триггер 28 отсчета задним фронтом секундного импульса с первого выхода делителя 29 частота устанавливается в нулевое coctoяниe Сигнал О с прямого выхода триггера, 28 отсчета накладывает запрет на вход вычита теля 19, и вычитатель 19 закрывается.
Тактовые импульсы с второго вь1хода делителя 29 частоты от генератора 30 тактовых импульсов поступают на С-еходпервого
D-триггера 31. С инверсного выхода триггера 28 отсчета сигнал 1 с R-входов D-триггеров 31 и 32 снимает запрет. На выходе первого элемента И 33 формируется сигнал, по которому производится перезапись вычисленной скорости заполнения из коммутатора 21 в регистр 22.
После этого на выходе второго элемента И 34 формируется сигнал, по которому закрывается коммутатор 21.
После каждого цикла качания сигналом третьего одновибратора блоки 20 17 и 18 памяти и регистр 21 обнуляются и процесс измерения скорости заполнения вакуум-камеры металлом на очередном цикле качания всасывающего патрубка повторяется.
Циклом качания всасывающего патрубка считается перемещение его вниз до уровня, заданного по шине 11, затем возврат вверх на заданное положение, поступающее по шине 10.
При подъеме всасывающего патрубка вверх происходит слив захваченной порции AG металла в ковш..
Когда торец патрубка достигает уровня, равного заданному верхнему рабочему положению, из вакуум-камеры вся захваченная масса порции ЛЗ металла сливается снова в ковш и наступает начало очередного цикла качания. Первым одновибратором 12 триггера 14 снова устанавливается в 1 по заднему фронту сигнала, от которого срабатывает третий одновибратор 20.
Практическая реализация устройства может быть осуществлена как аппаратным, так и программным путем на базе микропроцессорной техники или на комплексах технических средств, например, на программируемом контроллере типа МУ58.02.
Применение устройства позволяет оперативно и достоверно контролировать скорость, заполнения вакуум-камеры металлом через всасывающий патрубок из ковша непосредственно по ходу процесса вакуумирования.
При этом повышается точность контроля, исключается субъективные оценки скорости заполнения и слива, а также расширяется контроль процесса вакуумирования.
Эффективность от внедрения устройства определяется точностью контроля скорости заполнения, что позволяет вести оптимальный процесс вакуумирования и проводить исследовательские работы для различных марок сплавов.
Формула изобретения
Устройство контроля скорости заполнения вакуум-камеры металлом при вакуумировании, содержащее вакуум-камеру с всасывающим патрубком, периодически погружаемым в ковш с металлом, механизм перемещения вакуум-камеры, кинематически связанный через редуктор с датчиком импульсов,первый выход которого соединен с R-входом счетчика положения, суммирующий и вычитающий входы которого соединены соответственно с вторым и третьим выходами датчика импульсов, а разрядные выходы счетчика положения - с первыми входамипервой и второй схем совпадения, вторые входь) которых соединены соответственно с шиной задания верхнего рабочего положения и с шиной задания нижнего рабочего положения, а выходы их - с входами соответственно первого и второго одновибратора, выходы которых соединены соответственно с S- и R-входами RS-триггера, датчик массы последовател.ьно с аналогоцифровым преобразователем соединенный, разрядные выходы которого соединены с информационными входами первого и второго блоков памяти, вход записи первого блока памяти соединен с выходом первой схемы совпадения, а выходы первого и второго блоков памяти поразрядно соединены соответственно с первым и вторым входами вычитателя, прямой выход RS-триггера соединен с третьим одновибратором. выход которого соединен с входами обнуления первого и второго блоков памяти, блок регистрации, отличающееся тем, что, с целью обеспечения оперативного и достоверного контроля при каждом цикле вакуумирования, в него введены коммутатор, регистр, блок регистрации, блок синхронизации, состоящий из элемента И - НЕ,
дешифратора, элемента ИЛИ, триггера отсчета, делителя частоты, генератора тактовых импульсов, первого и второго Д-триггеров, первого и второго элементов
И, прямой выход RS-триггера соединен с входом записи второго блока памяти и через вход блока синхронизации с первым входом элемента И-НЕ, а информационный выход вычитателя через коммутатор с D-входом
регистра, разрядные выходы которого соединены с блоком регистрации и через информационный вход блока синхронизации с разрядными входами дешифратора, выходы которого соединены через элемент ИЛИ
с З-входом триггера отсчета, прямой выход которого соединен с управляющим входом вычитателя, а R-вход его - с выходом элемента И - НЕ, второй вход которого соединен с первым выходом делителя частоты,
вход которого соединен с выходом генератора тактовых импульсов, второй выход делителя частоты соединен с С-входом первого D-триггера, R-вход которого соединен с инверсным выходом триггера отсчета
и Я-8ходом второго D-триггера, С-вход которого соединен с инверсным выходом первого D-триггера, прямой выход которого соединен с первым входом элемента И, выход которого соединен с S-входом регистра,
а второй вход элемента И, - с инверсным выходом второго D-триггера, прямой выход и С-вход которого соответственно соединены с первым и вторым входами второго элемента И, выход которого соединен с,
входом закрытия коммутатора, выход третьего одновибратора соединен с входом обнуления регистра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля массы металла, прошедшего через вакуумкамеру при вакуумировании | 1990 |
|
SU1786114A1 |
| Устройство контроля массы металла, прошедшего через вакуум-камеру при вакуумировании | 1988 |
|
SU1502627A1 |
| Устройство автоматического контроля режимов работы порционного вакууматора | 1990 |
|
SU1721098A2 |
| Система программного управления процессом порционной вакуумной обработки стали | 1989 |
|
SU1684347A2 |
| Устройство автоматического контроля режимов работы порционного вакууматора | 1987 |
|
SU1482957A1 |
| Устройство для коррекции кинематических погрешностей механизма перемещения вакуум-камеры | 1989 |
|
SU1700063A1 |
| Процессор цифровой обработки сигналов | 1990 |
|
SU1789991A1 |
| Устройство для кодирования аналоговых сигналов | 1989 |
|
SU1624696A1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 1999 |
|
RU2149446C1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1985 |
|
SU1354242A1 |
Изобретение относится к автоматизации процесса вакуумирования стали при внепечной обработке и может быть использовано для исследований процессов порци- •онного вакуумирования различных марок- стали путем организации непрерывного контроля скорости заполнения металлом вакуум-камеры. Цель - оперативный и достоверный контроль при каждом цикле вакуумирования. Достигается ato введением коммутатора, блока регистрации, блока синхронизации и логических и функциональных связей между ними. Эффективность работы вакуумных установок в значительной степени зависит от точности контроля всех параметров, включая и контроль скорости заполнения металлом вакуум-камеры по ходу процесса вакуумирования. Устройство может быть реализовано как аппаратным, так и программным путем на базе микропроцессорной техники. 1 ил.соС
| Весовой измеритель скорости литья | 1983 |
|
SU1151832A2 |
| и др | |||
| Измерение скорр.стй литья в микропроцес(:орной системе весового дозирования | |||
| - Механизация и автоматизация производства | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| ' :AaVopCKoe свидетельство СССР | |||
| Устройство контроля массы металла, прошедшего через вакуум-камеру при вакуумировании | 1988 |
|
SU1502627A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
