Пальцы тракта
Изобретение относится к механосборочному производству, в частности к оборудованию для сборки, профилактики и ремонта гусеничных цепей.
Известен механизм шагового перемещения гусеничной цепи в стенде для сборки, включающий приводную звездочку для захвата цепи, связанную с редуктором и двигателем.
Недостатком этого механизма является низкая точность шагового перемещения гусеницы.
Известен также механизм шагового перемещения гусеничной цепи в стенде для ее сборки и разборки. Этот механизм выполнен в виде неподвижного корпуса с шарнир- но установленным в нем на проушине гидроцилиндром, шток которого соединен с ползуном, размещенным в направляющих корпуса. На ползуне шарнирно установлен захват для гусеницы, снабженный противовесом.
Недостатками известного устройства являются большие габариты и высокая металлоемкость.
Цель изобретения - компактность и минимальная металлоемкость, уменьшение энергопотребления и сокращение-времени цикла, повышение точности сборки траков гусеницы.
Эта цель достигается тем, что в устройстве для шаговой подачи цепи, содержащем установленные в корпусе силовой цилиндр и ползун с размещенным на нем захватом для цепи, ползун выполнен в виде штанги, размещенной в( направляющем отверстии корпуса, а захват жестко закреплен на переднем конце штанги и соединен со штоком силового цилиндра, при этом корпус подвешен на оси, смещенной от центра тяжести устройства в сторону захвата.
Уменьшение габаритов и металлоемкости устройства достигнуто за счет совмещения некоторых функций его составных частей. Так корпус, подвешенный на оси, частично выполняет функцию захвата (поворот и сцепление с гусеничной цепью), Шток гидроцилиндра выполняет также роль направляющей для захвата, лишая штангу, несущую этот захват, возможности вращения. Силовой цилиндр, неподвижно размещенный в корпусе, усиливает его, дополнительно уменьшая металлоемкость.
Кроме того, с целью уменьшения энергопотребления устройства и уменьшения времени цикла его работы, ось подвески корпуса может быть расположена на линии, проведенной через рабочий конец захвата параллельно оси силового цилиндра. Указанная цель достигается за счет уменьшения так называемого перебега захвата, т.е. разницы между длиной хода силового цилиндра и шагом перемещения гусеничной цепи.
Для повышения точности сборки траков
гусеничной цепи, имеющей резинометал- лический шарнир, захват дополнительно снабжен базирующей площадкой, взаимодействующей с нижней частью пальца тра0 ка, а задний торец штанги взаимодействует с жестким регулируемым упором.
На фиг. 1 показано устройство, продольный разрез; на фиг. 2 и 3 - влияние расположения оси подвески корпуса на величину
5 перебега захвата.
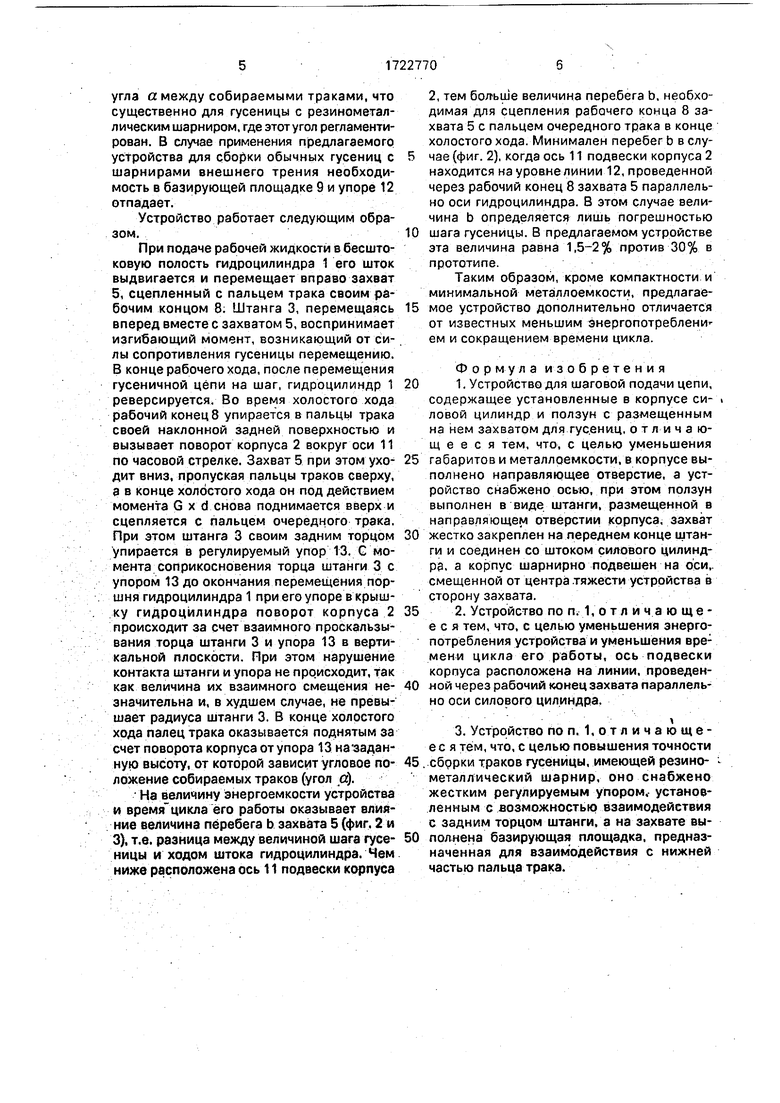
Устройство для шагового перемещения гусеничной цепи с резинометаллическими шарнирами состоит из гидроцилиндра 1, неподвижно установленного в разъемном
0 корпусе 2, цилиндрической штанги 3, параллельной оси гидроцилиндра 1 и подвижно сопряженной с направляющими втулками 4 корпуса 2. На переднем конце штанги 3 кон- сольно закреплен захват 5 для сцепления с
5 пальцами траков гусеничной цепи.
Средняя часть захвата 5 связана со штоком гидроцилиндра 1 посредством регулировочного винта 6, головка которого размещена в Т-образном пазу 7 захвата 5.
0 Со стенками узкой части паза сопряжены лыски на конце штока гидроцилиндра (не показаны), что исключает возможность его вращения. Головка регулировочного винта 6 взаимодействует со стопорным винтом
5 известной конструкции (не показан), исключающим самопроизвольный поворот регулировочного винта 6. Верхний рабочий конец 8 захвата 5 выполнен в виде зубооб- разного выступа. Передней поверхностью
0 этого выступа рабочий конец 8 захвата 5 контактирует с пальцем трака при его перемещении. Кроме того, рабочий конец 8 захвата 5 дополнительно снабжен горизонтальной площадкой 9, .контактирующей с
5 пальцем трака снизу. Корпус 2 подвешен к станине 10 сборочного стенда на оси 11, расположенной на уровне линии 12, проведенной через рабочий конец 8 захвата 5 параллельно оси гидроцилиндра 1. Кроме
0 того, ось 11 смещена от вертикали, на которой лежит центр тяжести G устройства, в сторону захвата 5 на величину d, образуя противовес, обеспечивающий подъем захвата вверх и его сцепление с пальцем
5 трака. Штанга 3, несущая захват 5, своим задним торцом упирается в жесткий регулируемый упор 13, закрепленный в станине 10. Этот упор 13, воздействуя через штангу 3 на захват5, посредством базирующей площадки 9 обеспечивает точность
угла а между собираемыми траками, что существенно для гусеницы с резинометал- лическим шарниром, где этот угол регламентирован. В случае применения предлагаемого устройства для сборки обычных гусениц с шарнирами внешнего трения необходимость в базирующей площадке 9 и упоре 12 отпадает.
Устройство работает следующим образом.
При подаче рабочей жидкости в бесшто- ковую полость гидроцилиндра 1 его шток выдвигается и перемещает вправо захват 5, сцепленный с пальцем трака своим рабочим концом 8; Штанга 3, перемещаясь вперед вместе с захватом 5, воспринимает изгибающий момент, возникающий от силы сопротивления гусеницы перемещению. В конце рабочего хода, после перемещения гусеничной цепи на шаг, гидроцилиндр 1 реверсируется. Во время холостого хода рабочий конец 8 упирается в пальцы трака своей наклонной задней поверхностью и вызывает поворот корпуса 2 вокруг оси 11 по часовой стрелке. Захват 5 при этом уходит вниз, пропуская пальцы траков сверху, а в конце холостого хода он под действием момента G x d снова поднимается вверх и сцепляется с пальцем очередного трака. При этом штанга 3 своим задним торцом упирается в регулируемый упор 13. G момента соприкосновения торца штанги 3 с упором 13 до окончания перемещения поршня гидроцилиндра 1 при его упоре в крышку гидроцйлиндра поворот корпуса 2 происходит за счет взаимного проскальзывания торца штанги 3 и упора 13 в вертикальной плоскости. При этом нарушение контакта штанги и упора не происходит, так как величина их взаимного смещения незначительна и, в худшем случае, не превышает радиуса штанги 3. В конце холостого хода палец трака оказывается поднятым за счет поворота корпуса от упора 13 на задан- ную высоту, от которой зависит угловое положение собираемых траков (угол а).
На величину энергоемкости устройства и время цикла его работы оказывает влияние величина перебега b захвата 5 (фиг, 2 и 3), т.е. разница между величиной шага гусеницы и ходом штока гидроцилиндра. Чем ниже расположена ось 11 подвески корпуса
2, тем больше величина перебега Ь, необходимая для сцепления рабочего конца 8 захвата 5 с пальцем очередного трака в конце холостого хода. Минимален перебег b вслучае (фиг. 2), когда ось 11 подвески корпуса 2 находится на уровне линии 12, проведенной через рабочий конец 8 захвата 5 параллельно оси гидроцилиндра. В этом случае величина b определяется лишь погрешностью
шага гусеницы. В предлагаемом устройстве эта величина равна 1,5-2% против 30% в прототипе.
Таким образом, кроме компактности и минимальной металлоемкости, предлагаемое устройство дополнительно отличается от известных меньшим энергопотреблени ем и сокращением времени цикла.
Формула изобретения
1. Устройство для шаговой подачи цепи,
содержащее установленные в корпусе си- . ловой цилиндр и ползун с размещенным на нем захватом для гусениц, о т ли чающееся тем, что, с целью уменьшения
габаритов и металлоемкости, в корпусе выполнено направляющее отверстие, а устройство снабжено осью, при этом ползун выполнен в виде штанги, размещенной в направляющем отверстии корпуса, захват
жестко закреплен на переднем конце штанги и соединен со штоком силового цилиндра, а корпус шарнирно подвешен на оси,. смещенной от центра тяжести устройства в сторону захвата.
2. Устройство по п. 1, отличающееся тем, что, с целью уменьшения энергопотребления устройства и уменьшения вре: мени цикла его работы, ось подвески корпуса расположена на линии, проведенной через рабочий конец захвата параллельно оси силового цилиндра,
3. Устройство по п. 1, о т л и ч а ю щ е - е с я тем, что, с целью повышения точности
. сбррки траков гусеницы, имеющей резино- - металлический шарнир, оно снабжено жестким регулируемым упором,- установленным с возможностью взаимодействия с задним торцом штанги, а на захвате выпол йена базирующая площадка, предназначенная для взаимодействия с нижней частью пальца трака.
фие.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для сборки траков гусеничной цепи | 1988 |
|
SU1549667A1 |
| Установка для разборки гусеничных лент | 1988 |
|
SU1585104A1 |
| Установка для сборки звеньев гусениц | 1990 |
|
SU1729679A1 |
| Стенд для разборки и сборки гусеничной цепи | 1984 |
|
SU1227399A1 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| Транспортное средство с гусеничным движителем | 1990 |
|
SU1729890A1 |
| Вспомогательное тяговое устройство для перемещения корпуса ледокольного судна через ледяной покров | 1981 |
|
SU1065289A1 |
| Стенд для разборки и сборки гусеничной цепи | 1979 |
|
SU872170A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Устройство для монтажа и демонтажа гусеничных цепей | 1990 |
|
SU1754404A1 |

Использование: сборка, профилактика и ремонт гусеничных цепей. Сущность изобретения: устройство содержит гидроцилиндр 1. установленный в корпусе 2, цилиндрическую штангу 3, на которой неподвижно закреплен захват 5, связанный со штоком гидроцилиндра 1. Верхний конец захвата 5 снабжен горизонтальной площадкой 9, выполненной для взаимодействия с пальцами трака 12, Корпус 2 подвешен на оси 11, смещенной от центра тяжести в сторону захвата и расположенной на уровне линии перемещения пальцев трака 12. 2 з.п. ф-лы, 3 ил.
| Стенд для разборки и сборки гусеничной цепи | 1979 |
|
SU872170A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
