Изобретение относится к сельскохозяйственному машиностроению, в частности к транспортным средствам для перевозки контейнеров.
Известны вилочные захваты, содержащие зубья, жестко соединенные с ними рамную стойку и рамный подвес, плечи которого соединены поперечниками. Между плечами на кронштейнах закреплена цепь подвеса.
Недостатком известного захвата является низкая универсальность применения, вызванная определенным неизменным расстоянием между зубьями и подвесом, непозволяющим захватывать два контейнера одновременно.
Известен вилочный захват, содержащий телескопическую рамную стойку, состоящую из двух частей с возможностью их фиксации посредством выполненных в этих частях отверстий и размещенных в них фиксирующих пальцев, соединенные с ее нижним концом с образованием L-образного подхвата вилы и соединенный с ее верхним концом рамный подвес с петлей для навешивания на крюк грузоподъемного механизма.
Известный захват при переналадке на разную высоту требует значительных затрат
3
О О
ел
времени, так как необходимо вытащить пальцы из отверстий, перемещать верхнюю часть стойки до совпадения требуемых отверстий в частях стойки и затем вновь установить пальцы. Кроме того, такой захват может использоваться только для прямоугольных грузов, так как округлые грузы могут скатиться с вил.
Цель изобретения - повышение удобства эксплуатации.
Указанная цель достигается тем, что в вилочном захвате, преимущественно для контейнеров, содержащем складную рамную стойку, состоящую по крайней мере из двух частей с возможностью их фиксации посредством выполненных в этих частях отверстий и размещаемых в них фиксирующих пальцев, соединенные с ее нижним концом с образованием L-образного подхвата вилы и соединенный с ее верхним концом рамный подвес с петлей для навешивания на крюк грузоподъемного механизма, части складной рамной стойки сочленены между собой и соответствующая ее часть - с рамным подвесом шарнирно, на последней из упомянутых частей стойки со смещением к зоне сочленения с рамным подвесом закреплены дополнительная петля для навешивания на крюк грузоподъемного механизма и кронштейн с отверстиями для фиксации рамного подвеса в его рабочем и нерабочем положениях, при этом расстояние от упомянутой дополнительной петли до шарнира сочленения частей стоек соответствует расстоянию от основной петли до шарнира сочленения подвеса и стойки, а нижняя часть стойки снабжена кронштейном с дополнительным отверстием, обеспечивающим фиксацию верхней части стойки в направлении, параллельном рабочему положению рамного подвеса.
Такая конструкция захвата позволяет производить быструю переналадку механизма при переходе с одноярусной загрузки на двухъярусную и обратно, а также использовать его при погрузке округлых грузов за счет замыкания контура стойка - подвес.
Кроме того, такая конструкция позволяет надежно фиксировать контейнеры в ходе их транспортировки на контейнеровозе.
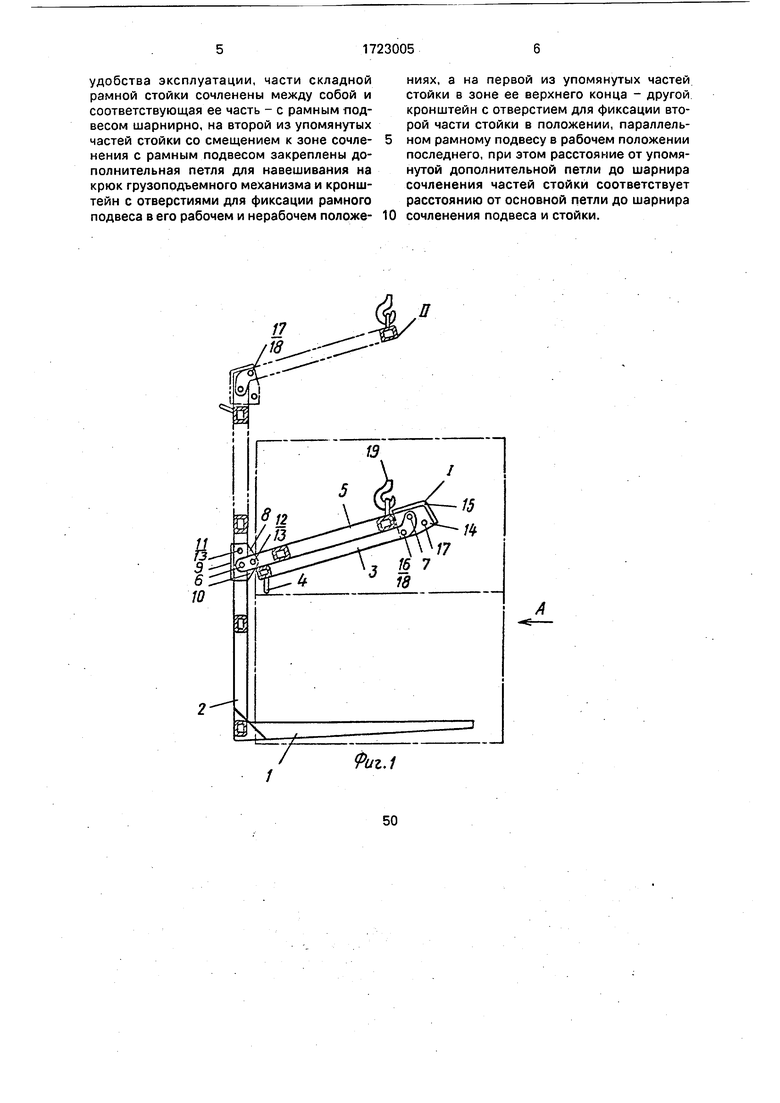
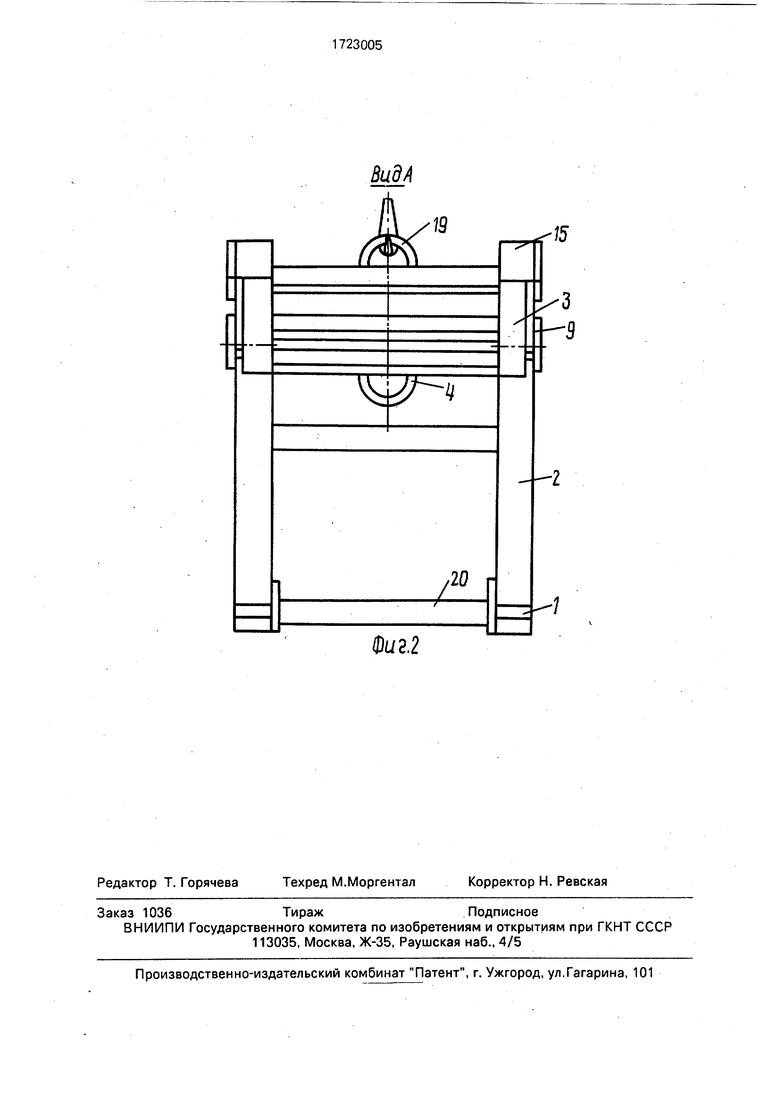
На фиг. 1 изображен вилочный захват в сложенном положении I и в разложенном положении li; на фиг. 2 - вид по стрелке А на фиг. 1.
Вилочный захват содержит вилы 1, жестко связанные с нижней частью 2 рамной стойки и рамный подвес 3 с петлей 4, связанный с верхней частью 5 рамной стойки. Нижняя 2 и верхняя 5 части стойки связаны
шарниром 6, а верхняя часть стойки с пол- весом 3 - шарниром 7, причем в месте соединения последних установлен кронштейн 8 с упорами 9 и 10, отверстиями 11 и 12 и фиксирующим пальцем 13, а в месте соединения частей 2 и 5 стойки установлен кронштейн 14. с упором 15, отверстиями 16 и 17 и фиксирующим пальцем 18.
Верхняя часть 5 стойки снабжена дополнительной петлей 19 для навешивания на крюк грузоподъемного механизма. Расстояние от петли 4 до шарнира 7 равно расстоянию от петли 19 до шарнира 6. Поперечные связи рамных частей 2,5 и
подвеса 3 выполнены в виде трубчатых балок 20.
При работе с одиночными контейнерами вильН подводятся под контейнер. Далее последний поднимается и перемещается в
необходимое место.
При этом часть 5 стойки опирается на упор 10, палец 13 установлен в отверстие 12, а палец 18 - в отверстие 16.
Крепление захвата к грузоподъемному
механизму производится за петлю 19.
При работе со штабелированными в два яруса контейнерами или нестандартными контейнерами с увеличенной высотой (например/картофельными) палец 13 извлекается из отверстия 12, часть 5 стойки поворачивается до упора 9 и фиксируется в этом положении установкой пальца 18 в отверстие 11. Палец 18 извлекается из отверстия 16, подвес поворачивается до упора 15
и фиксируется установкой пальца 18 в отверстие 17. В этом положении подвес крепится к грузоподъемному механизму посредством петли 4.
При транспортировке контейнеров
часть 5 рамной стойки устанавливают как в случае работы со штабелированными в два яруса контейнерами, а подвес 3 опускают вертикально вниз. Это позволяет использовать захват в качестве переднего упора для
контейнеров.
Формула изобретения Вилочный захват,, преимущественно для контейнеров, содержащий складную
рамную стойку, состоящую по крайней мере из двух частей с возможностью их фиксации посредством выполненных в этих частях отверстий и размещаемых в них пальцев, соединенные с нижним концом
одной части стойки с образованием L-образного подхвата вилы и соединенный с верхним концом другой ее части рамный подвес с петлей для навешивания на крюк грузоподъемного механизма, отличающийся тем, что, с целью повышения
удобства эксплуатации, части складной рамной стойки сочленены между собой и соответствующая ее часть - с рамным подвесом шарнирно, на второй из упомянутых частей стойки со смещением к зоне сочленения с рамным подвесом закреплены дополнительная петля для навешивания на крюк грузоподъемного механизма и кронштейн с отверстиями для фиксации рамного подвеса в его рабочем и нерабочем положе0
ниях, а на первой из упомянутых частей стойки в зоне ее верхнего конца - другой кронштейн с отверстием для фиксации второй части стойки в положении, параллельном рамному подвесу в рабочем положении последнего, при этом расстояние от упомянутой дополнительной петли до шарнира сочленения частей стойки соответствует расстоянию от основной петли до шарнира сочленения подвеса и стойки.
Вид А
| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный захват для штучных грузов | 1978 |
|
SU835925A1 |
| Вилочный захват для штучныхгРузОВ | 1978 |
|
SU804565A1 |
| Вилочный захват | 1979 |
|
SU867841A1 |
| ВИЛОЧНЫЙ ЗАХВАТ | 1992 |
|
RU2047551C1 |
| Захват для пакетированных грузов на поддонах | 1980 |
|
SU1030295A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| НАВЕСНОЕ БУРОРЫХЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПОГРУЗЧИКА | 1991 |
|
RU2011762C1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО НА АВТОФУРГОНЕ | 1969 |
|
SU255064A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к транспортным средствам для перевозки контейнеров. Цель изобретения - повышение удобства эксплуатации. Вилочный захват содержит состоящую из двух частей 2 и 5 рамную стойку, рамный подвес 3 и вилы 1. Части 2 и 5 шарниром 6, а подвес 3 шарниром 7 сочленены между собой. На конце подвеса 3 закреплена петля 4 для навешивания на крюк грузоподъемного механизма. В зоне соединения верхней части 5 стойки с рамным подвесом 3 установлен кронштейн 14с отверстиями 16 и 17 для фиксации с помощью пальца 18 подвеса 3 в рабочем и нерабочем положениях, а в зоне соединения частей 2 и 5 стойки - дополнительный кронштейн 8 с отверстиями 11 и 12 для фиксации с помощью пальца 13 верхней части 5 стойки в вертикальном или наклонном положении. Когда вилочный захват работает с контейнерами, размещенными в один слой, верхняя часть 5 стойки устанавливается наклонно, а рамный подвес 3 - в нерабочее положение. Когда контейнеры размещены в два яруса, обе части стойки устанавливают вертикально, а рамный подвес - в рабочее положение. 2 ил. со С
Редактор Т. Горячева
Техред М.Моргентал
Заказ 1036ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
Фиг.2
Корректор Н. Ревская
| Патент США № 3427066, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
