новлен на двухстепенном шарнире 5 с возможностью поворота во взаимно перпенди- кулярных плоскостях посредством исполнительных механизмов, например, гидроцилиндров 8, связанных с насосом 10. механизм управления которого электрически связан с гироскопическими датчиками 23 и 24. Каждому исполнительному механизму параллельно установлен разгружающий гидроцилиндр 13, полости которого связаны друг с другом и с дополнительным насосом 18 через регулируемый редукционо-предохрэнительный клапан 17. регулирующий орган которого связан с полостью высокого давления исполнительного механизма. Ре- дукционно-предохранительный клапан 17 выполнен в виде гидравлически связанных редукционного 25 и предохранительного 26 клапанов, у которых полости для подвода управляющего давления связаны между собой и с полостью давления исполнительного механизма. С входом редукционного клапана 17 гидравлически связан пневмогидроак- кумулятор 19. 4 з.п. ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПРЯДЕЙ КАНАТА | 2003 |
|
RU2233361C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| Транспортное средство | 1988 |
|
SU1614947A1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2006 |
|
RU2322618C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| Гидропривод протяжного станка | 2021 |
|
RU2760012C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2003 |
|
RU2243311C1 |
Изобретение относится к испытательным стендам транспортных машин, в частности к установкам, позволяющим в земных условиях имитировать пониженную гравитацию. Цель изобретения - повышение точности стабилизации положения в пространстве. Подъемный механизм 2 уста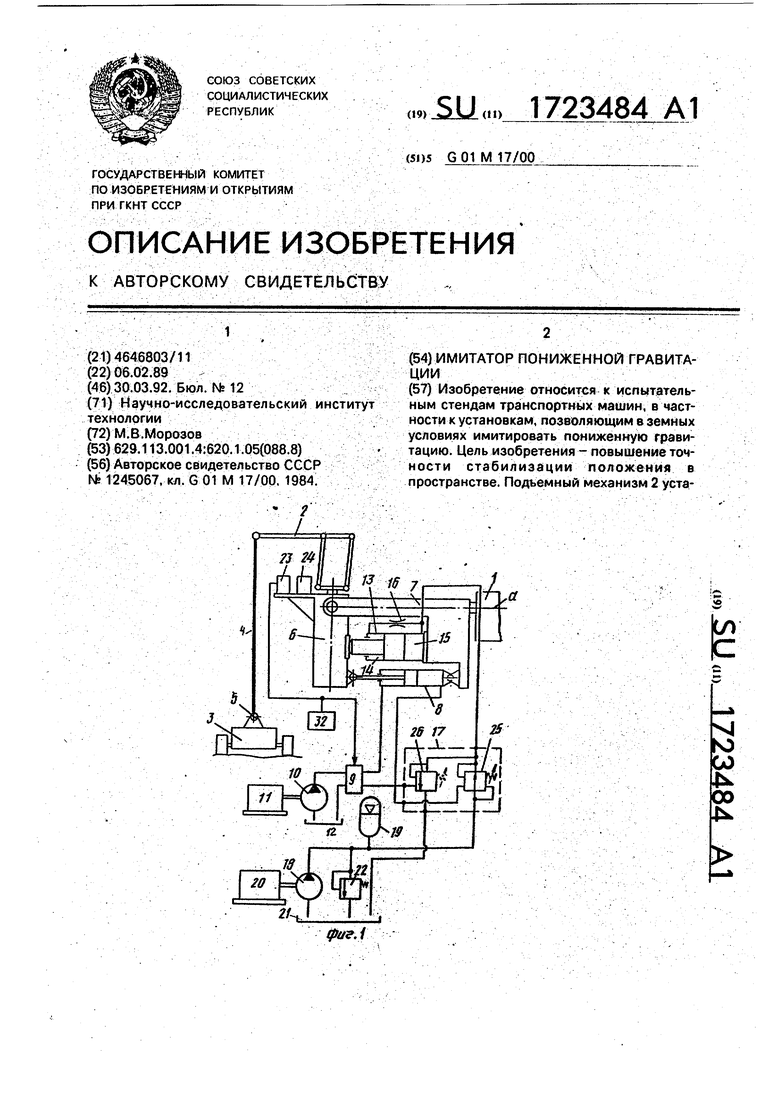
Изобретение относится к испытательным стендам транспортных машин, в частности к установкам, позволяющим в земных условиях имитировать пониженную гравитацию.
Цель изобретения - повышение стабилизации положения в пространстве.
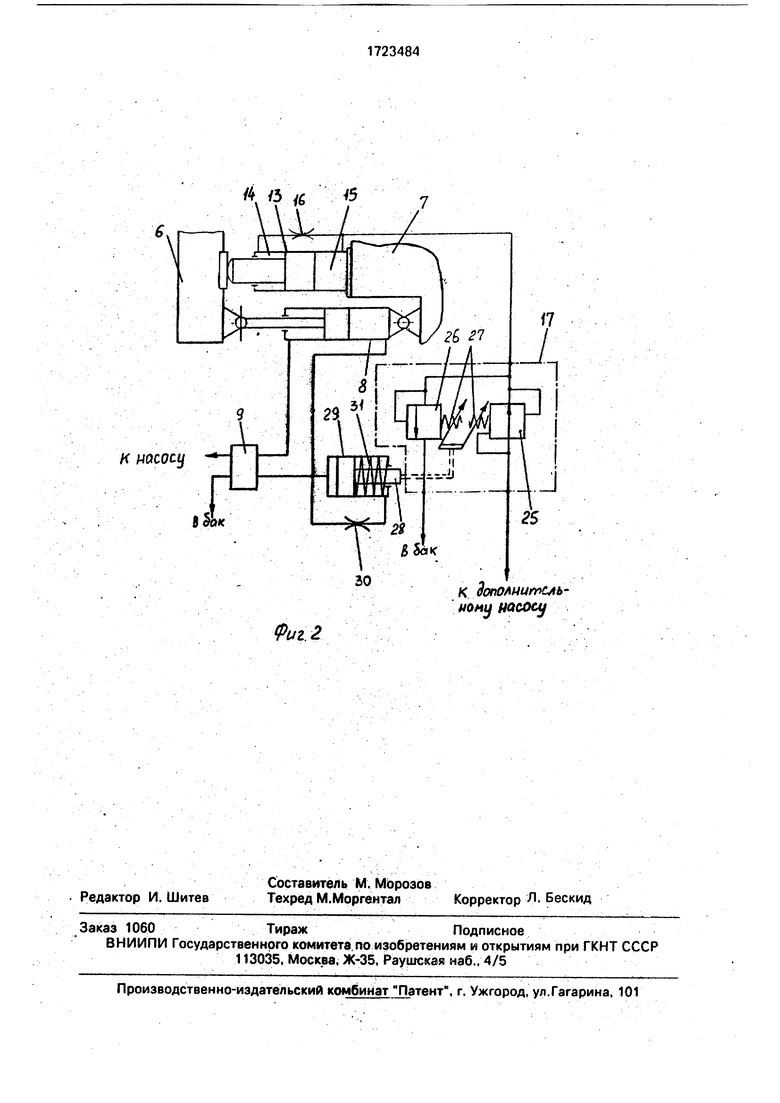
На фиг. 1 представлена конструктивная схема имитатора пониженной гравитации; .на фиг.2 - то же, конструктивная схема управления разгружающим гидроцилиндром, содержащая управляющий гидроцилиндр.
Имитатор пониженной гравитации содержит сопровождающее транспортное средство, на раме 1 которого шарнирно закреплен подъемный механизм 2, соединенный с вездеходом 3 в центре его тяжести при помощи троса 4 и трехстепенного шарнира 5. Подъемный механизм 2 установлен на горизонтальной поверхности основания б, закрепленного в двухстороннем шарнире 7 с возможностью поворота в двух взаимно перпендикулярных плоскостях. В каждой из этих плоскостей, т.е. между основанием 6 и корпусом шарнира 7, а также между корпусом шарнира 7 и рамой 1 идентично установ- лены исполнительные механизмы, выполненные в виде гидроцилиндров 8. Шток гидроцилиндра 8 шарнирно связан с основанием б, а корпус- с корпусом шарнира 7.
Полости гидроцилиндра 8 гидравлически связаны через электрогидравлический механизм 9 с насосом 10, приводной вал которого связан с двигателем 11. Всасывающий трубопровод насоса 10 и механизм 9 управления связан с баком 12. Между корпусом шарнира 7 и основанием 6 параллель- но гидроцилиндру 8 установлен раэгружащий гидроцилиндр 13, шток которого кинематически связан с основанием 6, а корпус - с корпусом шарнира 7. Полости 14 и 15 разгружающего гидроцилиндра 13 через дроссель 16 гидравлически связаны
между собой, а поршневая полость 15 связана с выходом редукционно-предохрани- тельного клапана 17, вход которого гидравлически связан с дополнительным
насосом 18 и пневмогидроаккумулятором
Всасывающий патрубок насоса 18 связан с баком 21, с которым также связан установленный параллельно дополнительному насосу 18 переливной клапан 22 и слив редукционно-предохранительного клапана
На горизонтальной поверхности основания 6 установлены датчики 23 и 24 гори- зонтального положения, которые выполнены, например, в виде гидроскопических элементов, при этом датчик 23 элек трически связан с механизмом 9 управления, а датчик 24 - с аналогичным механизмом управления устройства для разворота основания в продольной плоскости (не показано), т.е. вокруг оси а.
Редукционно-предохранительный клапан 17 и его подключение могут иметь различные констуктивные особенности. Редукционно-предохранительный клапан
(фиг. 1) содержит дистанционно-управляе- мые редукционный 25 и предохранительный 26 клапаны. Вход редукционного клапана (например, типа МКР)25 гидравлически связан с дополнительным насосом 18, а выход
-с входом предохранительного клапана (например, типа Г54-3) 26 и с поршневой полостью 15 разгружающего гидроцилиндра 13. Выход предохранительногоклапана 26 гидравлически связан с баком 21. Полости, в
которые подводится управляющее давление у клапанов 25 и 26, связаны между собой и с поршневой полостью гидроцилиндра 8. На фиг.2 показан редукционно-предо- хранительный клапан 17, содержащий регулируемые редукционный 25 и предохранительный 26 клапан, особенностью которого является та, что клапаны имеют механическое управление, задающий элемент 27 которого кинематически связан со штоком 28 5 управляющего гидроцилиндра 29. Поршневая полость управляющего гидроцилиндра 29 гидравлически связана с поршневой полостью гидроцилиндра 8 и через гидродроссель 30 - с штоковой полостью, в которой 10 установлена возвратная пружина 31, Устройство для разворота основания в продольной плоскости, т.е. в плоскости, параллельной направлению движения сопровождающего транспортного средства, 15 выполнено аналогично. Для ручного управления гидроцилиндрами влараллельно датчикам 23 и 24 установлен задатчик 32.
Имитатор пониженной гравитации работает следующим образом.20
Перед началом испытаний включаются двигатели 11 и 20, при этом связанные с ними насосы 10 и 18 подают давление соответственно в механизм 9 управления в пневмогидроаккумулятор 19 и разгружаю- 25 щий гидроцилиндр 13, а излишек рабочей жидкости сливается в бак 12 и через клапан 22 - в бак 21. За счет разности площадей штока и поршня разгружающий гидроцилиндр 13 создает разгружающий 30 момент. Компенсация момента неуравновешенности обеспечивается за счет предварительной настройки редукционно- предохранительного клапана 17. Затем вручную при помощи задатчика 32 устанав- 35 ливается горизонтальное положение основания 6 и запускаются гироскопические датчики 23 и 24. Имитатор готов к проведению испытаний. В процессе испытаний рама 1 сопровождающего транспортного 40 средства совершает, как правило, гармонические колебания в продольной и поперечной плоскостях.
Работа привода в поперечной плоскости..45
При наклоне основания б датчик 23 вырабатывает сигнал, пропорциональный углу наклона, который подается на механизм 9 управления, распределяющий рабочую жидкость под давлением от насоса 10 50 между полостями гидроцилиндра 8, шток которого, перемещаясь, восстанавливает горизонтальное положение основания 6. Гидроцилиндр 8 меньше разгружающего гидроцилиндра 13 и предназначен для пре- 55 одоления момента от сил инерции и трения, а также момента, обусловленного нестабильностью срабатывания предохранительного клапана 26. При совместном движении вездехода 3 и сопровождающего
транспортного средства расстояние между ними изменяется, например, увеличивается, что вызывает изменение момента неуравновешенности и, как следствие этого, возрастает давление в поршневой полости гидроцилиндра 8. Поскольку поршневая полость гидроцилиндра 8 связана с полостями для подвода управляющего давления клапанов 25 и 26, то одновременно возрастает редуцируемое давление на выходе из клапана 25 и давление срабатывания клапана 26. В результате этого усилие, развиваемое разгружающим гидроцилиндром 13, возрастает , компенсируя момент неуравновешенности. При уменьшении момента неуравновешенности происходит обратный процесс. При повороте основания 6 по часовой стрелке (фиг.1) рабочая жидкость подается в полость 15 разгружающего гидроцилиндра 13 от редукционного клапана 25, а при противоположном движении основания 6 жидкость из указанной полости сливается в бак 21 через предохранительный клапан 26. Таким образом происходит компенсация внешних кинематических и силовых воздействий. Для повышения устойчивости работы разгружюащего гидроцилиндра 13 между его полостями установлен гидродроссель 16, снижающий пульсацию давления и влияния дискретности работы редукционно-предохранитель- ного-клапана 17. В случае использования редукционно-предохранительного клапана 17с механическим управлением (фиг.2) изменение давления в поршневой полости гидроцилиндра 8 изменяет положение штока 28 управляющего гидроцилиндра 29 за счет различной деформации пружины 31. В свою очередь шток 28, воздействуя на пружины 27 клапанов 25.и 26, изменяет как величину редуцируемого давления на выходе клапана 25, так и давление срабатывания предохранительного клапана 26. В остальном работа редукционно-предохранительного клапана 17 и гидроцилиндров 8 и 13 аналогична.
Для повышение демпфирования и устойчивости работы между полостями управляющего гидроцилиндра 29 установлен гидродроссель 30. Разворот основания 6 в продольной плоскости в шарнире 7 осуществляется аналогично. Разделение функций при компенсации внешних воздействий на объект регулирования за счет введения разгружающих гидроцилиндров, воспринимающих силовые возмущения в то время, как исполнительный механизм компенсирует кинематические воздействия, а также силы трения инерции и т.д. поз воля ют существенно снизить установленную мощность иеполнительного механизма и его питающего насоса и за счет этого увеличить точность ком- пенсации внешних кинематических воздействий на объект регулирования, т.е. повысить точность стабилизации положения в пространстве основания подъемного механизма. Установка гидродросселей между полостями разгружающего и управляющего гидроцилиндров обеспечивает достаточную устойчивость системы компенсации и силовых возмущений. Устройство позволяет создать высокоточный комплекс для наземных испытаний транспортных средств высокой массы.
Ф о р м у л а и з о б р е т е н и я 1. Имитатор пониженной гравитации объекта, содержащий подъемный механизм, установленный на двухстепенном шарнире с возможностью поворота во взаимно перпендикулярных плоскостях посредством исполнительных гидроцилиндров, связанных с насосом, механизм управления которого электрически связан с гироскопическими датчиками, и разгружающий механизм, отличающ и Й с я тем, что, с целью повышения точности стабилизации положения объекта в пространстве, разгружающий механизм выполнен в виде установленного параллельно каждому исполнительному гидроцилиндру разгружающего гидроцилиндра, полости которого связаны одна с другой и с дополнительным насосом через регулируемый редукцион- ной-предохранительный клапанный блок,
регулирующий орган которого связан с полостью высокого давления исполнительного гидроцилиндра.
тем, что регулируемый редукционно-предо- хранительный клапанный блок выполнен в виде отдельных регулируемых подавлению редукционного и предохранительного клапанов непрямого действия, у которых полости для подвода управляющего давления связаны между собой и с полостью высокого давления исполнительного гидроцилиндра, при этом вход редукционного клапан связан с дополнительным насосом, а выход-с разгружающим цилиндром и входом предохранительного клапана.
пружиной в штоковой полости, его поршневая полость гидравлически связана с полостью высокого давления исполнительного механизма и через гидродроссель - со штоковой, а шток управляющего гидроцилиндра кинематически связан с регулирующими пружинами редукционно-предохранитель- ного клапана, при этом полости разгружающего гидроцилиндра связаны через
гидродроссель.
Фиг.2
К дополнипыь- иому пососу
| Авторское свидетельство CGCP Мг 1245067, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
