В существующих двухкоординатных нланшетных регистрирующих устройствах, работающнх совместно с ЦВМ, используются различные типы интерполяторов, обеспечивающих перемещение регистрирующей головки между точками, задаваемыми выходными кодами ЦВМ. Поскольку приводной механизм регистрирующей головки представляет собой динамическую систему, после поступления очередной пары значений координат в интерполяторах возникает переходной процесс, который может длиться достаточно долго, снижая тем самым скорость регистрации.
В предлагаемом устройстве максимальная скорость регистрации достигается за счет того, что в состав следящей, системы приводного механизма введен соединенный с логическим устройством корректирующий элемент, который обеспечивает получение наилучщего по быстродействию переходного процесса. В зависимости от величины приращения координаты за один щаг передаточная функция этого корректирующего элемента изменяется.
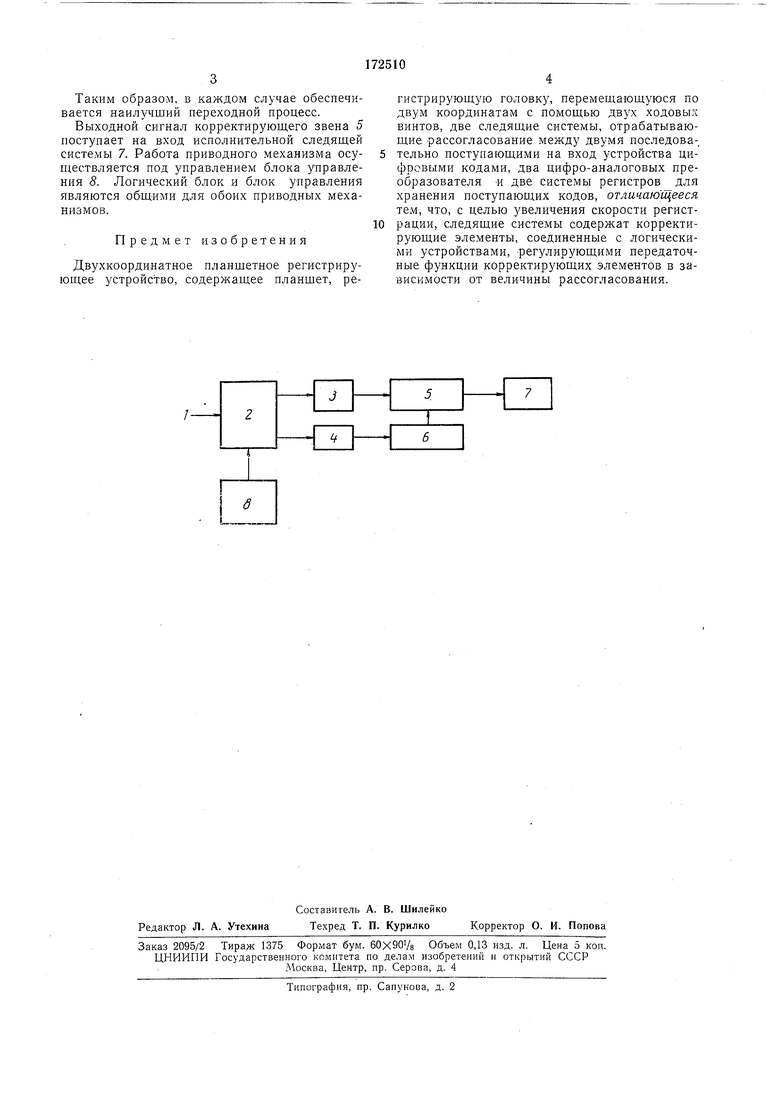
Па чертеже изображена структурная схема приводного механизма по одной координате.
Очередное значение координаты, представленное в цифровом коде, поступает по входу У. Это значение запоминается блоком регистров 2, который хранит и предыдущее значение координаты. На выходе блока регистров
установлены цифро-аналоговые преобразователи 3 и 4. Преобразователь 3 вырабатывает аналоговое напряжение, пропорциональное очередному значению координаты. Это напряжение поступает на вход корректирующего элемента 5. Преобразователь 4 вырабатывает аналоговое напряжение, пропорциональное разности очередного и предыдущего значений координаты. Это напряжение поступает на
вход логического блока 6.
Если напряжение на выходе преобразователя 4 не превыщает Зо/о от своего максимально возможного значения, то логический блок 6 устанавливает в блоке 5 передаточную
функцию вида
К(р) ,
(l-i-/ ri)(l--jr;r.,)
где li - постоянная, Т и Га - постоянные времени, обеспечивающие заданный вид переходного процесса, р - оператор Лапласа.
Если напряжение на выходе преобразователя 4 превышает Зо/о от своего наибольшего значения, то логическпй блок 6 устанавливает в блоке 5 передаточную функцию вида
(Р)
РС -грТ:,}
Таким образом, в каждом случае обеспечивается наилучший переходной процесс.
Выходной сигнал корректирующего звена 5 поступает на вход исполнительной следящей системы 7. Работа приводного механизма осуществляется под управлением блока управления 8. Логический блок и блок управления являются общими для обоих приводных механизмов.
Предмет изобретения
Двухкоординатное планщетное регистрирующее устройство, содержащее планшет, регистрирующую головку, перемещающуюся по двум координатам с помощью двух ходовых винтов, две следящие системы, отрабатывающие рассогласование между двумя последова-, тельно поступающими на вход устройства цифровыми кодами, два цифро-аналоговых преобразователя « две системы регистров для хранения поступающих кодов, отличающееся тем, что, с целью увеличения скорости регистрации, следящие системы содержат корректирующие элементы, соединенные с логическими устройствами, регулирзющими передаточные функции корректирующих элементов в зависимости от величины рассогласования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный преобразователь код-угол | 1973 |
|
SU486344A1 |
| Многоканальное устройство для управления следящими приводами | 1977 |
|
SU691809A1 |
| И. Г. Моисеев,И. И. Погожее, Ю. Н. Семенов и Н. М. Якименко | 1965 |
|
SU174689A1 |
| Устройство для комбинированного числового программного управления | 1973 |
|
SU485419A1 |
| ДВУХКООРДИНАТНОЕ ГРАФИЧЕСКОЕ УСТРОЙСТВО | 1967 |
|
SU200909A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Цифровая следящая система | 1978 |
|
SU769486A1 |
| Цифровая следящая система | 1990 |
|
SU1833835A1 |
| СПОСОБ УПРАВЛЕНИЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ СРЕДНЕЙ ДАЛЬНОСТИ С АКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПРИ НАВЕДЕНИИ НА ГРУППОВУЮ СОСРЕДОТОЧЕННУЮ ЦЕЛЬ | 2012 |
|
RU2570115C2 |
| Графопостроитель | 1978 |
|
SU735919A1 |
LJ
