связи также подключен к блоку 3 разгона и торможения. Выход сумматора 11 через цифро-аналоговый преобразователь 13 подключен к следящему приводу 10.
Устройство работает следующим образом
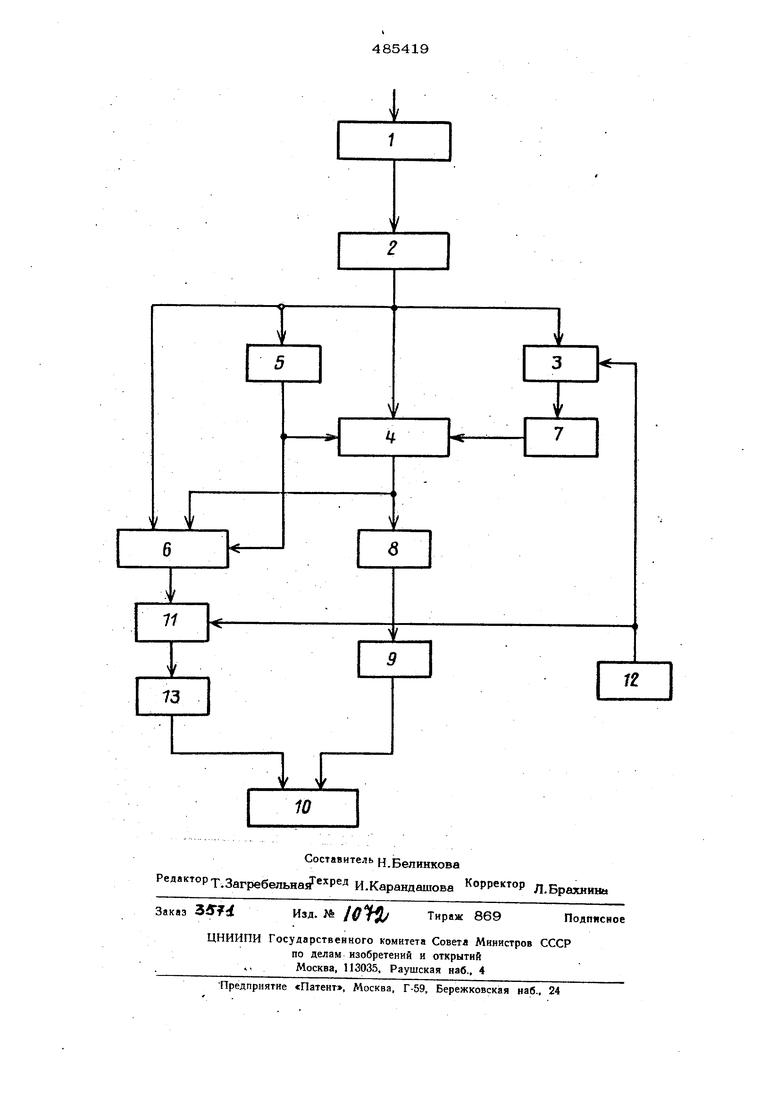
Информация из блока 1 ввода запоминается в блоке 2 буферной памяти, из которого распределяется по блокам: в блок 5 управления, интерполятор 4, блок 3 разгона и торможения и коммутатор 6. Эта информация содержит в себе два вида работы - контурная обработка и позиционирование.
В режиме контурной обработки блок 5 управлегшя подключает к блоку 2 буферной памяти канал интерполятора 4, При этом блок 5 управления отключает от первого входа коммутатора 6 блок 2 буферной памяти и подключает ко второму входу коммутатора 6 выходы текущих координат интерполятора 4. Таким образом, канал интерполятора и канал сумматора 11 работают одновременно. При каждом импуль се интерполятора 4 в сумматоре 11 происходит сравнение действительного положения механизма по датчику 12 обратной связи со значением текущей координаты, вычисленной интерполятором 4 и находящейся в регистре текущих координат (на чертеже не показаны) интерполятора 4. В случае равенства этих значений сигнал с нифро-аналогового гфеобразователя 13 равен на следящий привод 10 поступает управляющий сигнал с импульсно- потенциального преобразователя 9. Импульсы интерполятора 4 проходят через блок 8 регулирования постоянства контурной скорости для устранения неравномерности частоты интерполятора 4. Если при обработке контура возникает ошибка, то сумматор 11 вычисляет рассогласование и соответственно с цифро-аналогового преобразователя 13 поступает дополнительное управляющее воздействие на следящий привод 10, которое пропорционально ощибке. В режиме позиционирования блок 5
управления отключает канал интерполятора 4 от регистров блока 2 буферной памяти и подключает к ним вход коммутатора 6. На сумматоре 11 осуществляется срав-
некие заданного положения механизма с действительным по датчику 12 обратной связи. На следящий привод поступает управляющее воздействие с выхода цифро- аналоговогхэ преобразователя 13, которое
(Пропорционально рассогласованию между заданным и фактическим положениями, при этом сигнал на выходе импульсно-потенциального преобразователя 9 равен нулю.
Предмет изобретения
Устройство для комбинированного числового программного управления, содержащее датчик обратной связи, подключенный к сумматору, и последовательно соединенные блок ввода, блок буферной памяти, связанный с блоком управления, интерполятор, блок регулирования контурной скорости и следящий привод, причем блок управления связан с интерполятфом, соединенным через генератор импу/гьсов с блоком разгона и торможения, подключенным к буферной памяти, отличающееся тем, что, с целью повыщения быстродействия устройства, в него введен коммутатор, входы которого подключены к выходам блока буферной памяти, интерполятора и блрка управления, а выход - к следящему приводу, причем датчик обратной связи ооединен с блоком разгона и торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для комбинированного числового программного управления | 1980 |
|
SU911469A2 |
| Многоканальное устройство для управления следящими приводами | 1977 |
|
SU691809A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
| Устройство для программного управления | 1985 |
|
SU1249482A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |