фиг.2
Изобретение относится к машиностроению и может быть использовано в качестве захватов роботов и манипуляторов.
Цель изобретения - упрощение конструкции захвата.
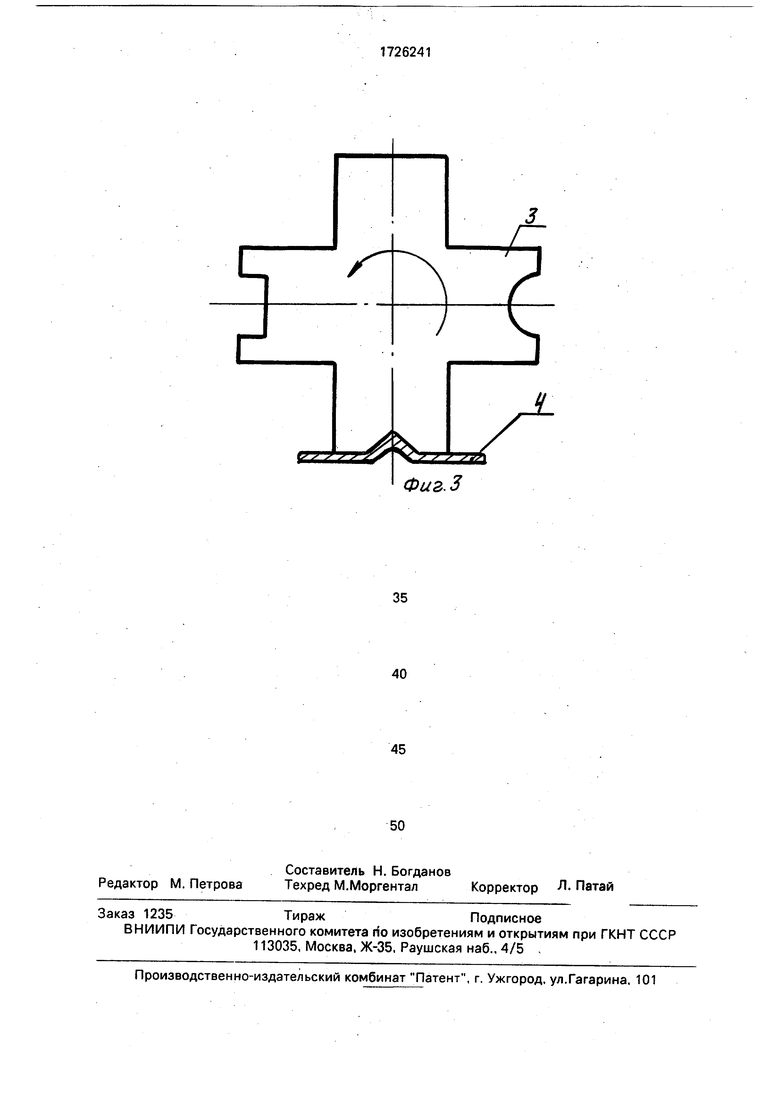
На фиг.1 изображен электромагнитный захват, общий вид; на фиг.2 - шестипозици- онный вариант захвата; на фиг.З - четырех- позиционный вариант захвата.
Устройство содержит намагничивающую катушку 1, расположенную на сердечнике 2. На торцах последнего укреплены ферромагнитные пластины 3 (полюсные магнитопроводы) с несколькими профильными рабочими поверхностями, к которым в определенном положении магнитопрово- дов притягивается деталь 4. Каждая рабочая поверхность пластины соответствует определенной форме притягиваемой детали, Таким образом, электромагнитный захват имеет возможность путем поворота сердечника 2 вокруг своей оси относительно несущей рамы 5 изменять форму рабочей поверхности, прилегающей к поверхности детали. Плоскости пластин 3 перпендикулярны оси поворота сердечника 2.
Устройство работает следующим образом.
Электромагнитный захват приближается к поверхности захватываемой детали 4.
При подаче напряжения на намагничивающую катушку 1 под действием электромагнитных сил осуществляется притяжение ферромагнитной детали 4 к рабочей поверхности пластин 3, которая по форме соответствует конфигурации детали. При снятии напряжения с катушки 1 происходит освобождение детали 4.
При смене номенклатуры деталей с изменением их конфигурации осуществляется замена рабочей поверхности захвата путем фиксированного поворота сердечника 2 вокруг своей оси при помощи поворотного устройства (не показано) или, например, путем поворота руки робота, на которой устанавливается несущая рама 5.
Формула изобретения Многопозиционный электромагнитный
захват, содержащий несущую раму и поворотный относительно нее сердечник с охватывающей его намагничивающей катушкой и полюсными магнитопроводами, имеющими несколько профильных рабочих поверхностей, отличающийся тем, что, с целью упрощения конструкции, полюсные магнитопроводы выполнены в виде пластин, установленных на торцах сердечника, причем плоскость пластин перпендикулярна оси поворота сердечника.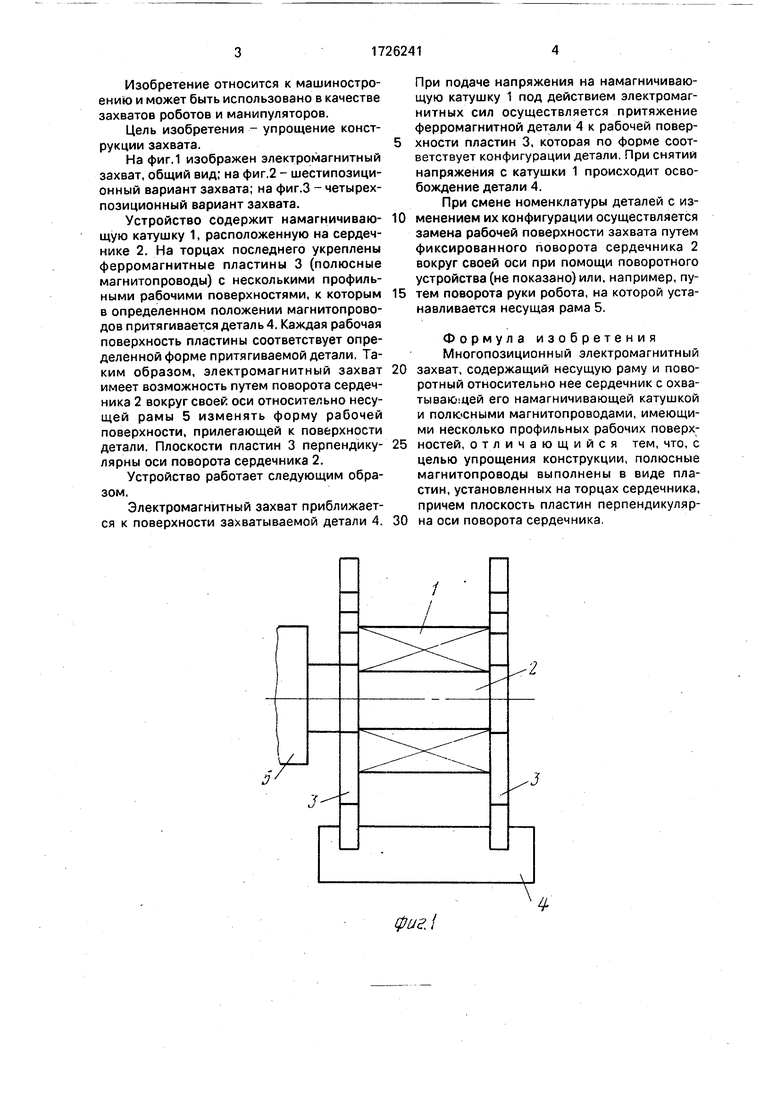
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный самоустанавливающийся схват | 1990 |
|
SU1805033A1 |
| Электромагнитное захватное устройство | 1989 |
|
SU1648758A1 |
| Оснастка для изготовления, транспортирования и сборки магнитных форм | 1988 |
|
SU1675021A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ МАГНИТНЫХ РАЗЪЕМНЫХ ФОРМ | 1994 |
|
RU2080205C1 |
| НАМАГНИЧИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ РАЗЪЕМНОЙ МАГНИТНОЙ ФОРМЫ | 1997 |
|
RU2118226C1 |
| МАГНИТНЫЙ РАЗЪЕМНЫЙ НЕГАТИВ | 1996 |
|
RU2113832C1 |
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ МАГНИТНОГО РАЗЪЕМНОГО НЕГАТИВА | 1995 |
|
RU2093111C1 |
| Электромагнитный захват | 1986 |
|
SU1440708A1 |
| Грузоподъемный электромагнит | 1986 |
|
SU1435525A1 |
Использование: в качестве захватных устройств роботов и манипуляторов. Сущность изобретения: на торцах сердечника с намагничивающей катушкой установлены полюсные магнитопроводы в виде пластин 3, имеющих несколько профильных рабочих поверхностей для притяжения детали 4. Для смены формы рабочей поверхности сердечник имеет возможность соответствующего фиксированного поворота вокруг своей оси. Зил.
фигА
Ч
| Магнитное грузозахватное устройство | 1974 |
|
SU516606A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
