Изобретение относится к машиностроению и может быть использовано в ро- бототехнике при- манипулировании ферромагнитными объектами (деталями) с различной формой поверхности в различных участках захвата, преимущественно уд- линенными вдоль оси или линии образующей поверхность, например типа ступенчатых валов, стержней, стоек, в сечениях которых наблюдаются различные по форме и размерам окружности, овалы, мно- гоугольники и др.
Целью изобретения является повышение надежности захвата и удержания детали, а также расширение возможностей захвата при исполнении деталей с различными формами в их сечениях.
Сущность изобретения поясняется чертежами.
На фиг.1 показано устройство с фиксацией ступенчатого вала; на фиг.2а,б - вид по стр елке А на фиг.1 (при различных положениях руки робота); на фиг.З - различная форма пластин по контактирующему контуру
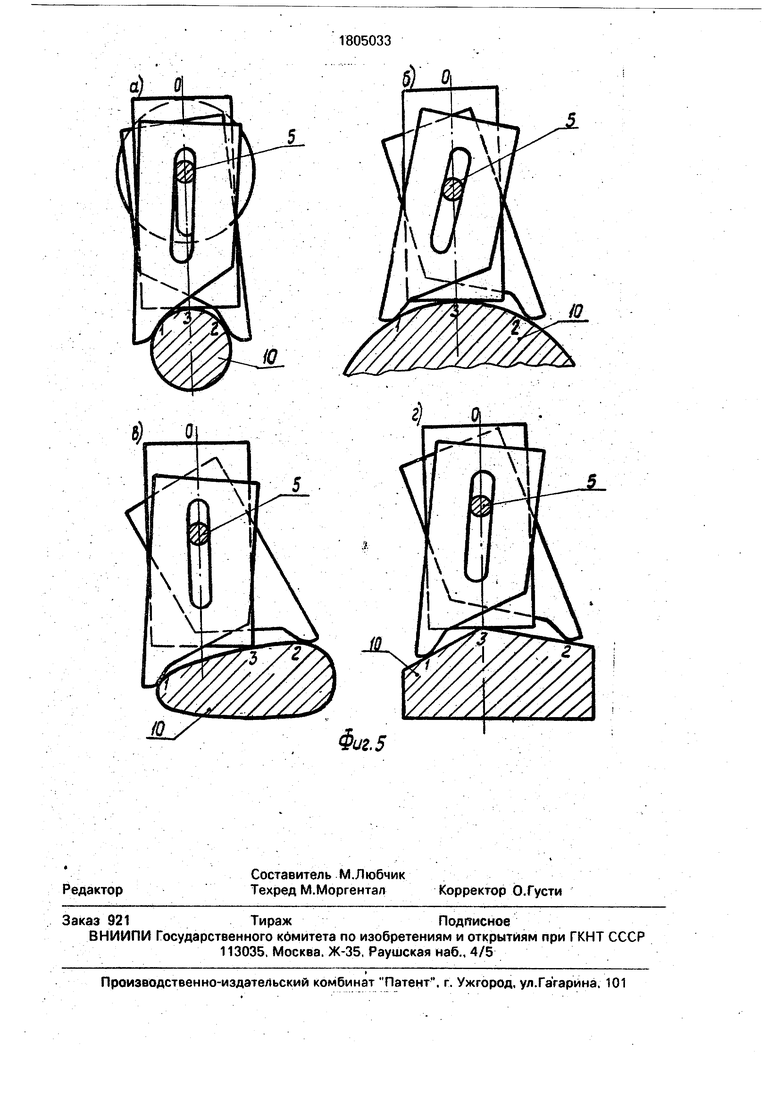
при наборе в пакет; на фиг.4 - расположение сердечника электромагнита с направляющим валом у торца относительно корпуса с упором; на фиг.5а-г - расположение пластин при различных формах захватываемых деталей.0
Электромагнитный самоустанавливающийся схват (фиг.1) содержит связанный с рукой робота 1 несущий немагнитный корпус 2, выполняющий также роль упора, на котором укреплен сердечник электромагнита 3 и его намагничивающая катушка 4. На торцах сердечника расположены направляющие валики 5, на которых фиксируются прорези самоустанавливающихся пластин 6, укрепленных гайками 7 с возможностью свободного перемещения друг относительно друга в определенных пределах. Отличительной особенностью этих пластин является различная их форма по контуру в местах захвата фиксирующего пакета.
На фиг.2 в качестве примера показаны возможные точки контактирования (1,2,3), не изменяющиеся при различных положе«
Ё
00
о ел
Сд
ы
ниях руки робота 1 и при наборе пакета из трех пластин б с различными формами по контуру контактирования в пакете, например состоящем (фиг.З) из прямоугольной пластины и двух рядом с ней расположенных пластин различными в зеркальном отображениями, у которых имеется упорный .зуб 8 и скос 7 у нижней стороны пластины. Прорези 8, выполненные в пластинах при размерах И 12, фиксируют их на валиках 5, укрепленных на торцах сердечника 3 электромагнита (фиг.4), установленного на корпу- ,се 2.
При различных формах поверхности захватываемого объекта 10 (фиг.5), например в сечении области захвата которых наблюдаются окружности различных диаметров (а,б), овал (в) или многогранник (г), пластины под силой веса проворачиваются вокруг валика 5, самоустанавливаются и обеспечивают контакт минимум в трех точках (1,2,3).
-
Электромагнитный самоустанавливаю щийся схват работает следующим образом.
Схват рукой робота 1 подводится к де тали 10 и прижимается к ней упором корпуса 2, при этом пластины 6 фиксаторов свободно перемещаясь под действием силы веса в пакетах, самоустанавливаются относительно друг друга в соответствии с формой детали 10, схватывая ее и контактируют не менее чем в трех точках на разных линиях образующих поверхность ее захвата.
-
При подаче питания на катушку 4 электромагнита создается магнитное поле, замыкающееся по сердечнику 3 электромагнита, двум фиксаторам, являющимся его
5 полюсами и захватываемой детали, под действием которого пластины в пакетах фиксаторов прилипают друг к другу и к торцам сердечника, обеспечивая их жесткое крепление, а также магнитное притяжение дета10 ли к пакету пластин и ее удержание в рабочем процессе.
При снятии напряжения с катушки происходит отпуск детали и возвращение устройства в исходное положение.
15 в Положительный эффект данного изобретения заключается в том, что расширя- ются возможности захвата.
Формула изобретения Электромагнитный самоустанавлива20 ющийся схват, содержащий корпус с установленным на нем электромагнитом, выполненным в виде сердечника с намагничивающей катушкой, продольная ось которого перпендикулярна продольной оси 25 корпуса, и пакеты пластин из магнитного материала, расположенные на торцах сердечника, при этом пластины в пакетах установлены с возможностью свободного перемещения одна относительно другой,
30 о т л ичающийся тем, что, с целью повышения надежности в работе, пластины в пакете выполнены с различным профилем рабочей поверхности.

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1990 |
|
SU1811477A3 |
| Магнитный схват | 1990 |
|
SU1811484A3 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Захватное устройство для мягких деталей | 1991 |
|
SU1779583A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Многопозиционный электромагнитный захват | 1990 |
|
SU1726241A1 |

Использование: машиностроение, в за- хватНых органах, манипуляторов. Сущность изобретения: схват содержит корпус 2, электромагнит и пакеты пластин 6. Электромагнит выполнен в виде сердечника 3 с намагничивающей катушкой 4 и установлен на корпусе 2 таким образом, что его продольная ось перпендикулярна продольной оси корпуса. Пластины 6 выполнены из магнитного: материала с различным профилем рабочей поверхности и расположены на торцах сердечника с возможностью свободного перемещения относительно друг друга. При контакте с захватываемой деталью 10 пластины 6 устанавливаются в соответствии с ее формой. А при подаче питания на катушку 4 деталь притягивается к пакету пластин, 5 ил,
| Заявка Японии № 6326783, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
