14
Изобретение относится к грузоза- хватам, в частности к зпектромагнит- ньш захватам манипуляторов и роботов, и предназначено для поштучной.выбсфки и ориентации, преимущественно, цэжинд рических ферромагнитных деталеЙ5 распознавания их простейших конструкций контроля длины и определения положения ориентированной детали.
Цель изобретения - повьшение производительности , точности ориентации детали, определение похгоже1-шя ориен- тироваш-1ь х деталей путем контроля ик дайн, распознавания консгруктивньк особенностей деталей и ис.ключенив возможности захвата группы даталей,,
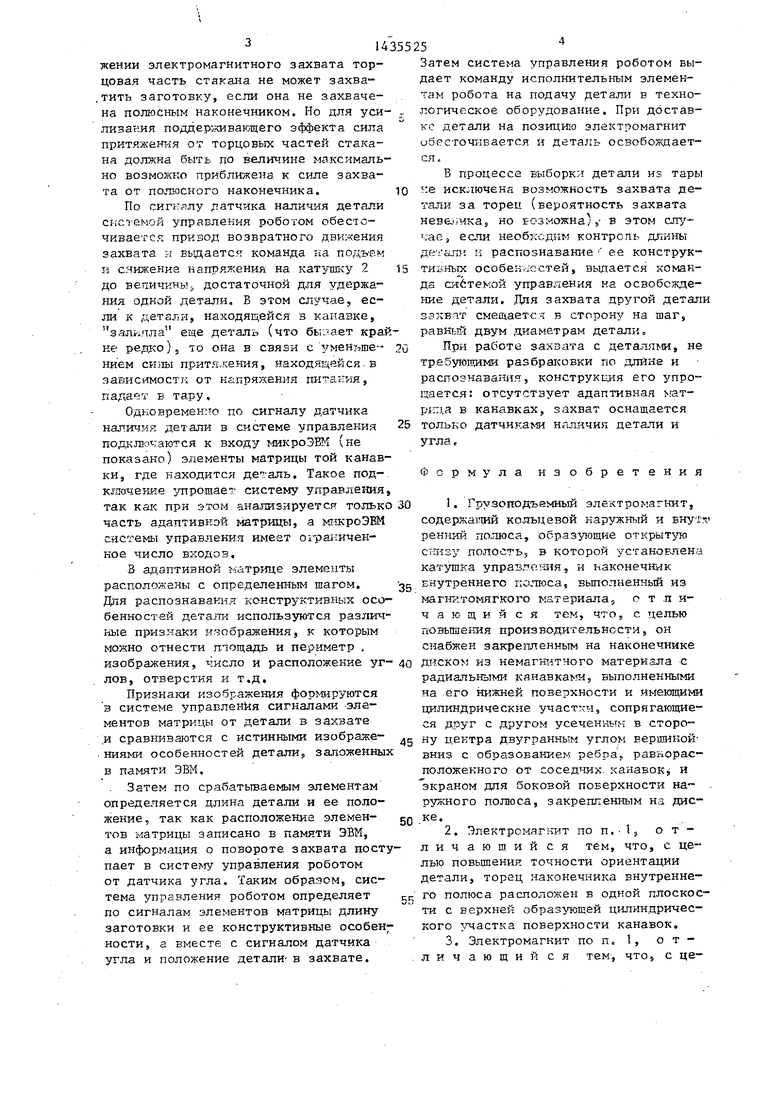
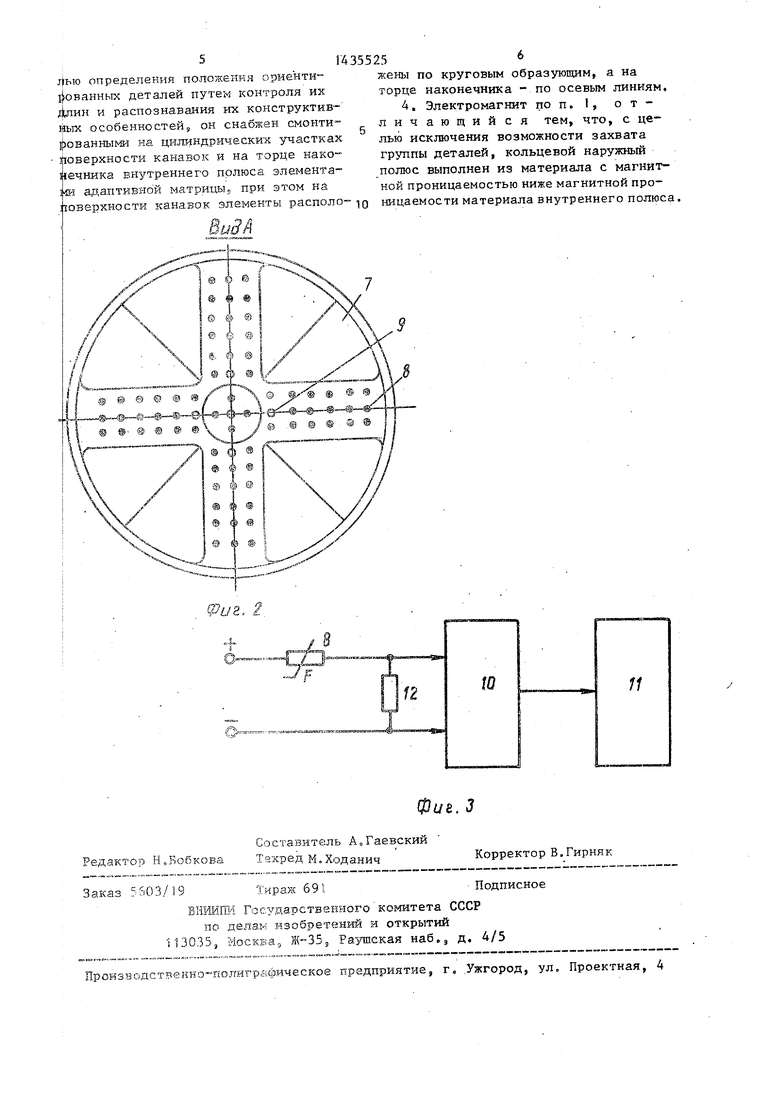
На фиг 1 показан электромагнит вертикальный разрезу на фиг, 2 - вид А на фиг... 1| : на фиг„ 3 - ггодключвние элементов матрицы к системе управле- НИН промышленным роботом.
Электромагнит содержит стержень 15 являющийся центральным внутренним полюсом, на который наса:жена катушка 2 возбуждения и с натягом дном вверх через центральное отверстие одет ферромапштньш стакан 3, являющийся наружньш полюсом. Вокруг стакана расположен экран 4 из немагнитного мате риала для устранения залипания ме- таллическ1-1х частей детали к его боковой внешней поверхности„
Нижняя часть стерло-ьч Р1меет смен- ньв полюсггый наконечник 5,, Материал полюсного наконечника выбирают с мак .симально возможной магнитной проница- емостно, а материал ферромагнитного стакана - из уа;г1овияр при котором сила притяжения торцовых частей стакана при рабочем напряжении электромагнита была бь1 не в состоянии самостоятельно захватить детальр а выполняла бы поддерш-гваю1Ц1 1о роль,, т„ег, при захвате Детали полюсным наконечником поддерживала деталь,
Соотногаение сил притяжения полюсного наконечника 5 и торцовых частей стакана 3 можно регулировать зазором меж,п,у гopизoнтaля tt проведенными через торцовые части стакана и.лотосно- го наконечника„
0
5 0
5 0
5
0
Боковая поверхность полюсного наконечника экранирована диском 6 с радиальными канавками,.; имеющими цилиндрические поверхности. Последние сопрягаются между собой двугранными углами 7, усеченными к центру диска плоскостями, составляющими с горизонталью острый угол с вершиной к центру диска. На цилиндрической поверхности и полюсном наконечнике встроена адаптивная матрица 8, часть элементов 9 ,которой используется в ка- честве датчика наличия детали.
Элементы адаптивной матрицы расположены по образующим цилиндрической поверхности и осевым линиям торцовой части полюсного наконечника. На базе центрального адаптивного элемента полюсного наконечника и адаптивных элементов, расположенных по два на каж- дьй осевой линии канавки симметрично по каждую сторону от полюсного наконечника И-в-непосредственной близбс- ти к нему, выполнен датчик наличия детали.
Все датчики подключены к согласующему элементу 10 системы- I управления через выходные сопротивления 12.
Датчшс наличия детали связан с системой управления постоянно. Матрица связана с системой управления гибким кабелем (не показан).
Электромагнит работает следующим образом.
При подходе захвата к навалу по сигналу системы управления роботом подается напряжение на кат ушку 2 и на привод робота (не показан), осу- ществляюпщй возвратный поворот (на 5-6) захвата с частотой 0.,-f),2 ---,
Под действием магнитного поля деталь затягивается в один из радиальных каналов (тем самьм ориенти 5 руется) и
залипает
к полюсному наконечнику и через изоляционный промежуток - к торцовой части стакана. При этом возвратное движегше захвата улучшает соскальзывание детали в канавки,
Ввиду того, что стержень с полюс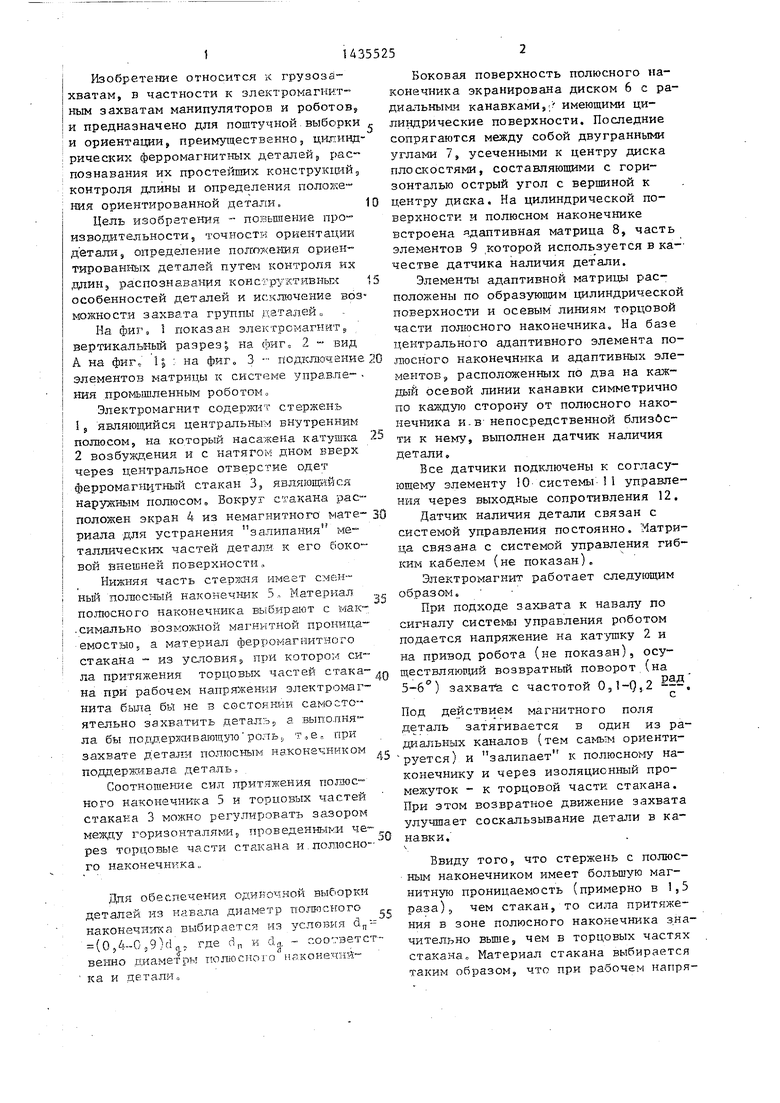
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный захват | 1986 |
|
SU1440708A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Магнитный схват | 1990 |
|
SU1812103A1 |
| Электромагнитный захват | 1979 |
|
SU918090A1 |
| Электромагнит малогабаритного спектрометра электронного парамагнитного резонанса | 1989 |
|
SU1642343A1 |
| Запоминающее устройство для контрольно-сортировочных автоматов | 1973 |
|
SU488260A1 |
| Захватное устройство | 1986 |
|
SU1318505A1 |
Изобретение относится к грузозахватным устройствам и может быть использовано как рабочий элемент робота при одиночной выборке из навала заготовок цилиндрической формы. Целью изобретения является повьппе- ние производительности. Электромагнит содержит стержень 1, на который насажена катушка 2. На стержень 1 дном вверх надет ферромагнитный стакан 3 через центральное отверстие в дне стакана. Нижняя часть стержня имеет сменный полюсной наконечник 5. Боковая поверхность экранирована немагнитным диском 6 с радиальными канавками, имеющими цилиндрические поверхности. На цилиндрической-поверхности и полюсном наконечнике встроена адаптивная матрица, часть элементов используются как датчик наличия детали. Для обеспечения одиночной выборки деталей из навала диаметр полюсного наконечника выбирают из условия: dp (0,4-0,9)dfl, где d,, и do - соответственно диаметры полюсного наконечника и детали. Положение детали в схвате определяется системой управления робота по сигналам элементов матрицы. 3 з.п. ф-лы, 3 ил. ip Ж фиг.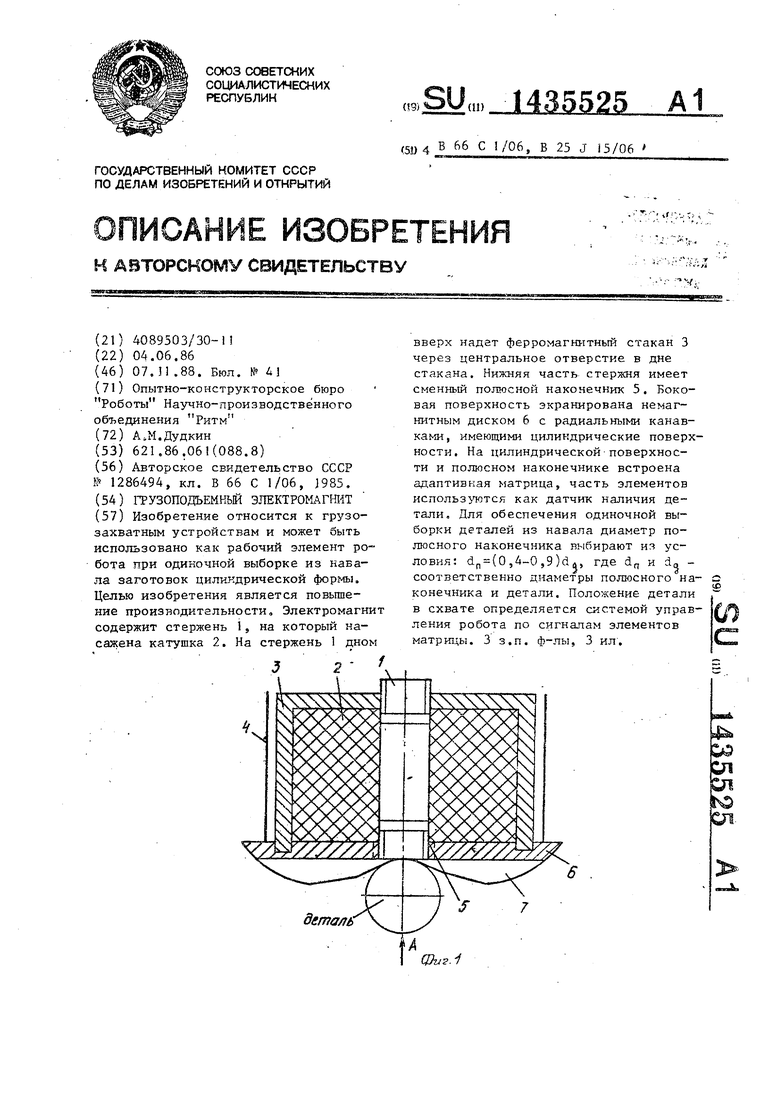
Для обеспечения одиночной выборки деталей из навала диаметр полисного наконечника выбирается из условия (0,4-059)cl , где d,, и d, Bei-шо диаметры полюсного ка и детали о
соо гветст
ным наконечником имеет большую магнитную проницаемость (примерно в 1,5 раза), чем стакан, то сила притяжения в зоне полюсного наконечника значительно выше, чем в торцовых частях стакана. Материал стакана выбирается таким образом, что при рабочем наприжении электромагнитного захвата торцовая часть стакана не может захва- ,Тить заготовку, если она не захваче- на полюсным наконечником. Но для уси лизания поддерживающего эффекта сила притяжения от торцовых частей стакана должна быть по величине максимально возможно приближена к силе захвата от полисного наконечника.
По сигналу датчика наличия детали cfiCTeMOH управления роботом обесточивается привод возвратного движения захвата I-E выдается команда на подъ-ем н снижение напрялсения на катзпшку 2 до величиныj достаточной для удержания одной детали, В этом случае, если к детахл-, находящейся в канавке, залипла еще деталь (что крайне редко) 5 то она в связи с уменьше-- нием СИ31Ы притя,кения, находящейся-в зависимости от напряжения питания, падает в тару,
Одновременно по сигналу датчика наличия детали в системе управления пoдклю 7aкlтcя к входу микроэвм (не показано) элементы матрицы той канавки, где находится деталь. Такое подкл зочетге упрощает систему управления так как при этом ана,пи5ируется тольк часть адаптивной матрицы, а мгжроЭШ системы управления имеет ограниченное число входов.
1, Грузоподъемный элeктpo aгнитJ содержаний кольцевой наружный и вну ренгетй по,шоса, образующие открытую стшзу полость, в которой установлен катушка управло ния, и наконечник
В адаптивной матрице элементы расположены с определенным шагом, внутреннего полюса, вьтолненный из Для распознавания конструктивных осо- магнйтомягкого материала, о т л и- бенностей дета.т-1 используются различные признаки изображения, к которым можно отнести площадь и периметр ,
чающийся тем, что, с целью повышения производительности, он снабжен закрепленным на наконечнике
изображения, число и расположение уг- 40 диском из немагн5-1тного материала с
лов, отверстия и т.д.
Признаки изображения формируются в системе управления сигналами -элементов матрицы от детали в захвате .и сравниваются с истинными изображениями особенностей детали, заложенны в памяти ЭВМ,
. Затем по срабатьгоаемым элементам определяется длина детали и ее положение, так как расположение элемен- тов матрицы записано в памяти ЭВМ, а информация о повороте захвата постпает в систему управления роботом от датчика угла. Таким образом, система управления роботом определяет по сигналам элементов матрицы длину заготовки и ее конструктивные особенности, а вместе с сигналом датчика угла и положение детали- в захвате.
Затем система управления роботом выдает команду исполнительным элементам робота на подачу детали в технологическое оборудование. При доставке детали на позицию электромагнит обРсточЕ-твается и деталь освобождается,,
В процессе вь:борки детали из тары не исключена возможность захвата детали за торец (вероятность захвата неве,иика8 но Еозможна) э- в этом слу- ; ае, если необксдкм контроль длины деч али и распознавание ее конструктивных особен ;сстей, выдается команда снбтеной управления на освобождение детали. Для захвата другой детал захват смещается в сторону на шаг, равньй двум диаметрам детали.
При работе захвата с деталями, не требующими разбраковки по длине и распознавания, конструкция его упрощается; отсутствует адаптивная мат- ри:1.а в канавках, захват оснащается только датчиками наличия детали и угла.
Формула изобретения
1, Грузоподъемный элeктpo aгнитJ содержаний кольцевой наружный и внутренгетй по,шоса, образующие открытую стшзу полость, в которой установлена катушка управло ния, и наконечник
внутреннего полюса, вьтолненный из магнйтомягкого материала, о т л и-
внутреннего полюса, вьтолненный из магнйтомягкого материала, о т л и-
чающийся тем, что, с целью повышения производительности, он снабжен закрепленным на наконечнике
Q р
радиальными канавка 5Из выполненньтми на его нижней поверхности и имеющими цилиндрические участки, сопрягающиеся друг с другом усеченным в сторо- 5 -чу центра двугранным углом вершиной- вниз с образованием ребра, равнорас- положенного от соседт их. канавок.; и экраном для боковой поверхности на™ . ружного полюса, закрепленным на. диске,
3,Электромагнит по п. 1, отличающий ся тем, что 5 с це-
О
Редактор РКБобкова
Составитель А с Гаевский Техред М.Ходанич
12
10
11
Фиё. 3
Корректор В.Гирняк
| Грузоподъемный электромагнит | 1985 |
|
SU1286494A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
