та 8 установлена ось, взаимодействующая с продольным пазом, выполненным в кронштейне 10, содержащем губки для носка изделия. Кронштейн 11, содержащий губхи для пятки изделия, укреплен в двух точках: посредством оси и взаимодействующих между
собой оси и криволинейного паза в корпусе схвата. При работе устройства обеспечиваются предварительный съем пятки изделия с форм, а также шаговая подача платформы приемного механизма в вертикальном направлении. 10 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема с отделочных форм и укладки носочных изделий | 1987 |
|
SU1433858A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Устройство для захвата чулочно-носочных изделий на отделочных формах | 1990 |
|
SU1735456A1 |
| Устройство для съема изделий с форм в машинах для отделки чулочно-носочных изделий | 1990 |
|
SU1763539A1 |
| Устройство для съема обуви с колодки | 1983 |
|
SU1192775A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Устройство для съема обуви с колодки | 1989 |
|
SU1664261A1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Полуавтоматическая линия для сборки обуви | 1975 |
|
SU526347A1 |
| Машина для экспериментальнойНОСКи ОбуВи | 1979 |
|
SU847981A1 |
Изобретение относится к производству трикотажных изделий и позволяет повысить надежность работы за счет облегчения снятия изделий с форм и обеспечения постоянства уровня укладки изделий. Устройство содержит два схвата 8 с губками, закреплен- ных на штоке пневмоцилиндра 4, который установлен на кронштейне 7, опрокидывающемся от действия пневмоцилиндра 5, механизм для раскладки изделий, включающий пневмоцилиндрс пневмоприжима- ми и приемный механизм 2, включающий платформу 31. Платформа закреплена на верхнем конце рейки. Нижняя часть рейки подпружинена пружиной. На корпусе схвз
Изобретение относится к производству трикотажных изделий, а именно к устройствам для сьема носочных изделий с отделочных форм и их укладки.
Известно устройство для снятия изде- лий с форм чулочно-формовочной машины, содержащее съемники изделий, надетых на формы, механизм управления съемниками и привод перемещения съемников, механизм отвода изделий с пневмозахватами и гори- зонтальным транспортером. Устройство снабжено также счетчиком изделий, включающим храповое колесо, движение которого связано с движением механизма отвода.
Недостатком устройства является то, что снятие изделия с формы осуществляется путем вертикального перемещения съемников, т.е. одновременно снимаются пятка и носок изделия, Это затрудняет снятие изделия и может привести к его повреждению. Другим недостатком устройства является укладка изделий на транспортер, что вызывает необходимость дополнительной укладки изделий в пачки (в тару).
Последний недостаток устраняется в ус- тройстве для съема с отделочных форм и укладки носочных изделий, содержащем два схвата с эластичными губками и с приводами перемещения губок, привод перемещения схватов по заданной траектории, механизм для раскладки изделий и приемный механизм, включающий платформу для укладки изделий, снабженную устройством для шаговой подачи платформы в вертикальном направлении. В корпусах схватов выполнены каналы для подвода сжатого воздуха через губки к изделию. Это позволяет создать воздушный слой между формой и изделием для уменьшения силы трения, что способствует облегчению съема. В процессе работы устройства происходит укладка изделий в стопу.
Данное устройство является ближайшим к предлагаемому по технической сущности. Его недостатки заключаются в следующем: во-первых, поскольку губки схвата захватывают все изделие как одно целое, то невозможно разделить движения по снятию пятки и носка изделия, а без
предварительного снятия пятки с формы окончательное снятие всего изделия затруднено; во-вторых, перемещение платформы, при помощи которой происходит укладка изделий, осуществляется посредством силового цилиндра, а применяя указанное средство, трудно обеспечить шаговую подачу платформы на толщину изделия, что не позволяет обеспечить постоянство уровня укладки изделий.
Таким образом, известное устройство ненадежно в работе, так как не обеспечивает надежный съем и укладку изделий. Кроме того, устройство сложно по конструкции (наличие пневмопривода губок), а также не обеспечивает надежного (точного) подсчета количества снятых изделий, так как при использовании механического счетчика, например, связанного с движением платформы, возможен неправильный подсчет (при отсутствии изделия на форме или при его неснятии).
Целью изобретения является повышение надежности работы устройства за счет обеспечения предварительного снятия с формы пятки изделия и обеспечения постоянного уровня укладки изделий, а также упрощение конструкции устройства и повышение точности подсчета количества снятых изделий.
Поставленная цель достигается тем, что в устройстве, содержащем два схвата с губками из эластичного материала и с приводами перемещения губок, привод перемещения схватов по заданной траектории, механизм для раскладки изделий и приемный механизм, включающий платформу для укладки изделий, снабженную устройством для шаговой подачи платформы в вертикальном направлении, согласно изобретению, каждый схват содержит две губки соответственно для пятки и носка изделия, закрепленные на кронштейнах, подпружиненных относительно корпуса схвата.
Кронштейн с губками для носка изделия связан с корпусом схвата посредством взаимодействующих между собой оси и паза, расположенного в продольном относительно кронштейна направлении. Кронштейн с
губками для пятки изделия связан с корпусом в двух точках с возможностью поворота вокруг одной точки закрепления другой точки, выполненной в виде взаимодействующих между собой оси и криволинейного паза. Устройство для шаговой подачи выполнено в виде реечно-храпового механизма, верхняя часть рейки которого соединена с платформой, нижняя подпружинена, а собачка храпового колеса установлена с возможностью взаимодействия с приводом перемещения схватов.
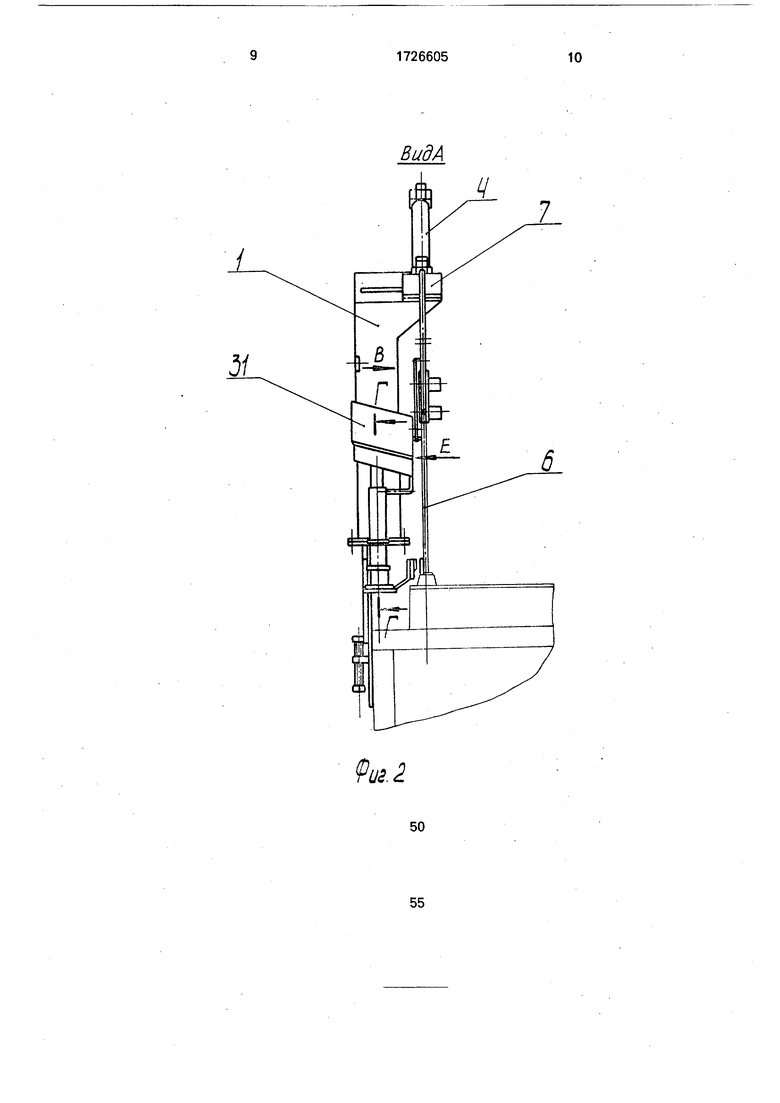
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 2 (конструкция схвата); на фиг. 5 - часть конструкции схвата в увеличенном виде; на фиг. 6 - разрез Г-Г на фиг. 2 (механизм опускания приемного устройства); на фиг. 7 - разрез Д-Д на фиг. 6; на фиг. 8 - вид Е на фиг. 2; на фиг. 9 - разрез Ж-Ж на фиг. 5; на фиг. 10 - разрез К-К на фиг. 5.
Устройство для съема носков с форм машины для отделки чулочно-носочных изделий и их последующей укладки содержит манипулятор 1, приемный механизм 2, установленные на раме машины 3, систему управления и подсчета готовых изделий и механизм для раскладки изделий.
Манипулятор 1 состоит из сварного основания со встроенными в него пневмоци- линдрами 4 и 5. Пневмоцилиндр 4 съема носков с форм 6 установлен на опрокидывающемся наклонном кронштейне.
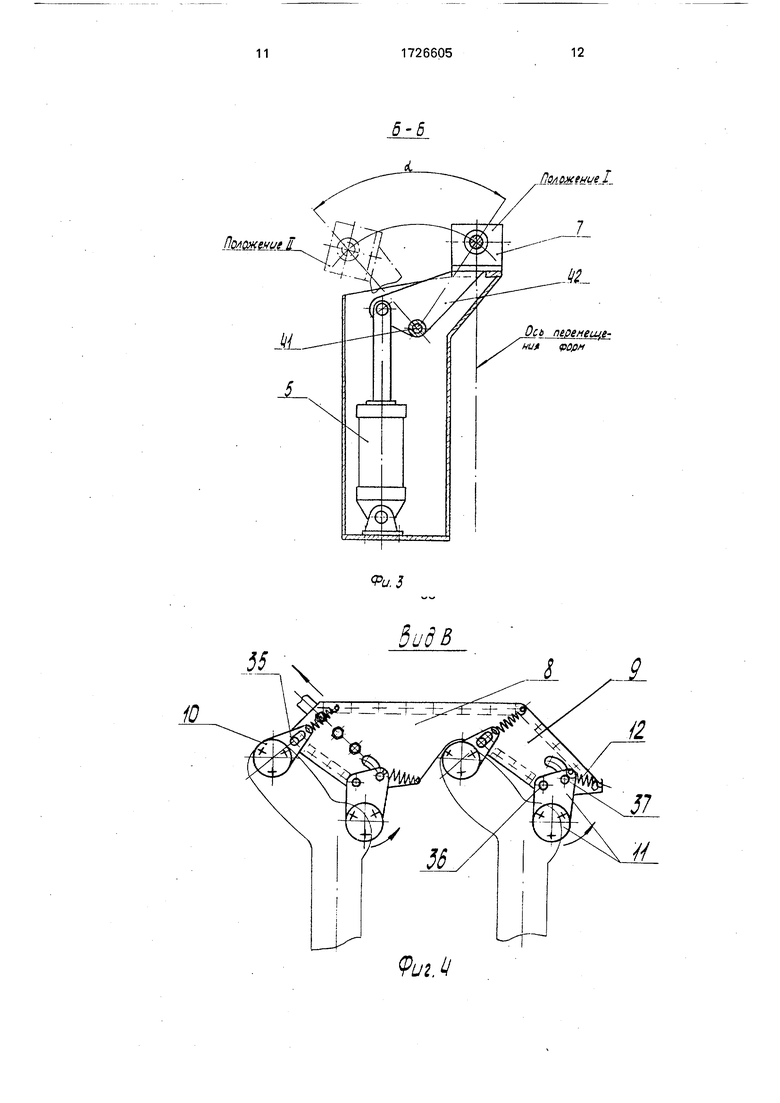
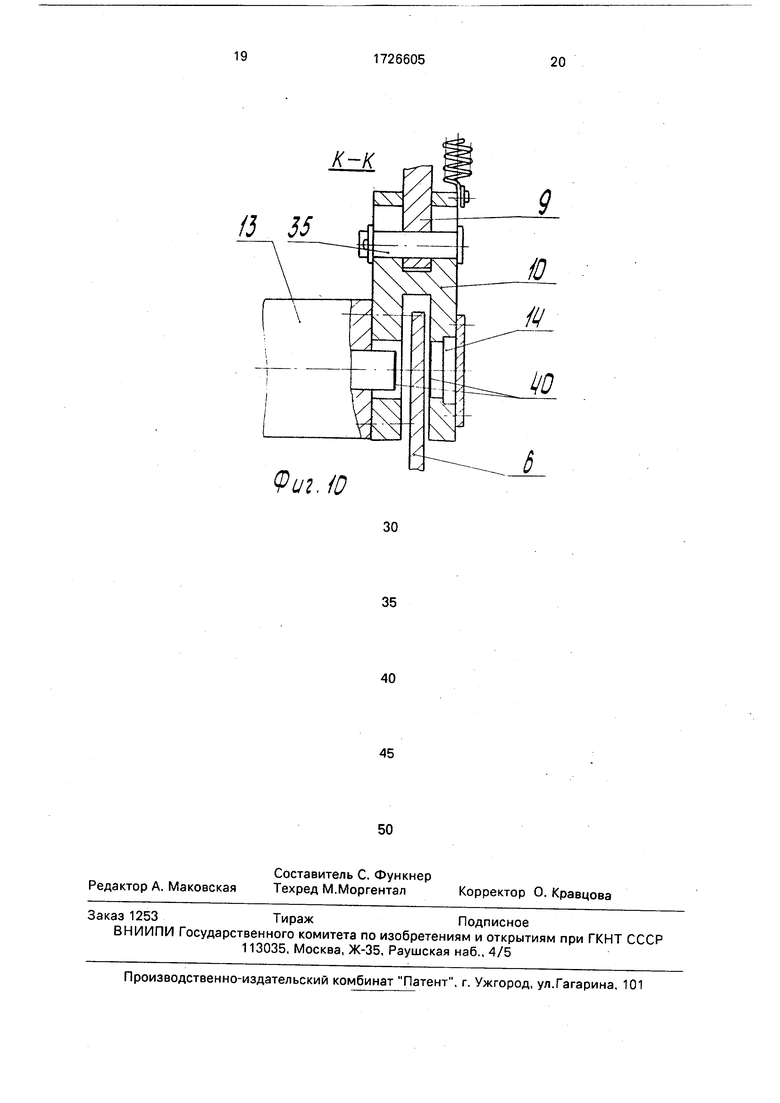
На конце штока цилиндра 4 неподвижно закреплен схват 8 (фиг. 4), представляющий собой две щеки 9, скрепленные между собой с зазором. На схвате шарнирно закреплены кронштейны 10 и 11, поджатые в крайнее положение пружинами 12. Кронштейны снабжены с одной стороны зажимами - электромагнитами 13, а с другой - губками 14.
Пневмоцилиндр 5 (фиг. 3) установлен внутри основания манипулятора и шарнирно связан с опрокидывающимся наклонным кронштейном 7. На задних и передних крышках обоих цилиндров установлены бесконтактные конечные выключатели 15, а на штангах 16 - взаимодействующие с ними якоря 17.
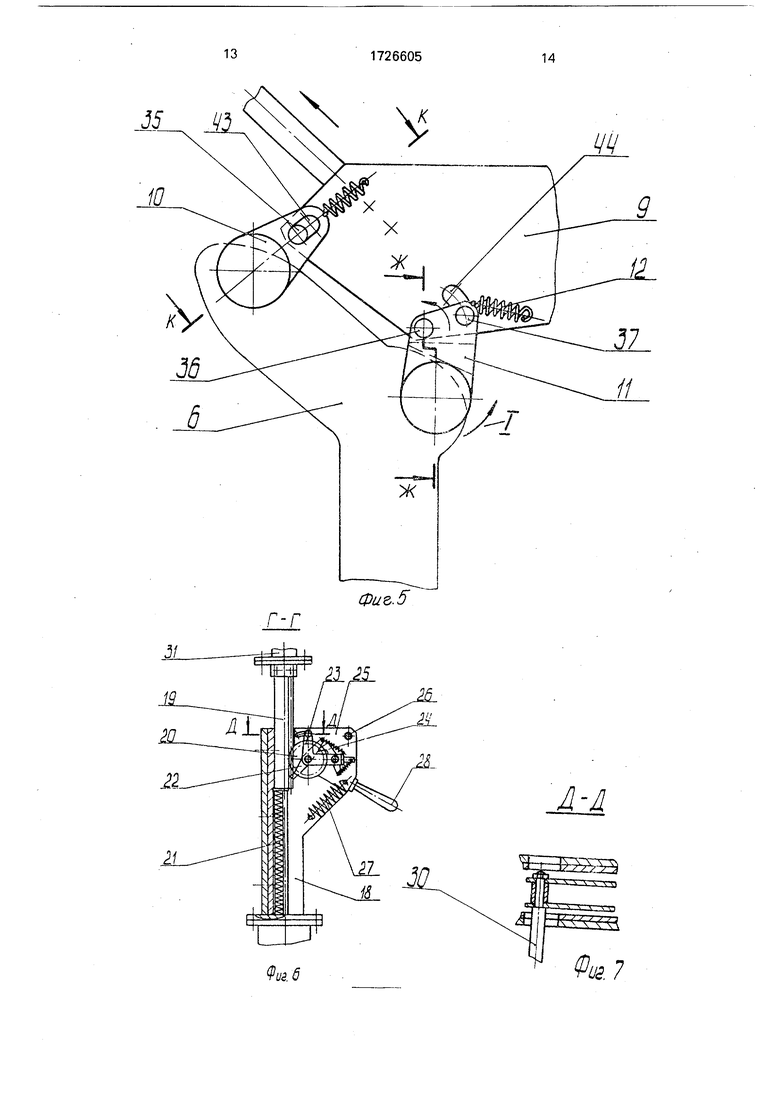
Приемный механизм 2 представляет собой стойку 18 (фиг. 6) с вмонтированной в нее зубчатой рейкой 19, входящей в зацепление с зубчатым колесом 20. В нижней части стойки установлена пружина 21, подпружинивающая рейку вверх. Для предотвращения самопроизвольного подъема рейки под действием пружины на оси зубчатого колеса установлена стопорная собачка
22, упирающаяся в зуб рейки. Рабочее перемещение рейки 19 вниз на шаг зубчатого зацепления осуществляется за счет поворота кронштейна 23 с установленной на нем
подпружиненной собачкой 24 на определенный угол. Корпус 25 со встроенным в него кронштейном 23 и зубчатым колесом 20 подвешен на оси 26 стойки 18 и поджат к рейке пружиной 27. Для быстрого вывода из
0 зацепления зубчатого колеса с рейкой и быстрого ее подъема имеется рукоятка 28.
Поворот кронштейна 23 осуществляется за счет взаимодействия водила 29 (фиг. 1), закрепленного на штоке цилиндра 4, при
5 прямом его ходе с рычагом 30 кронштейна 23.
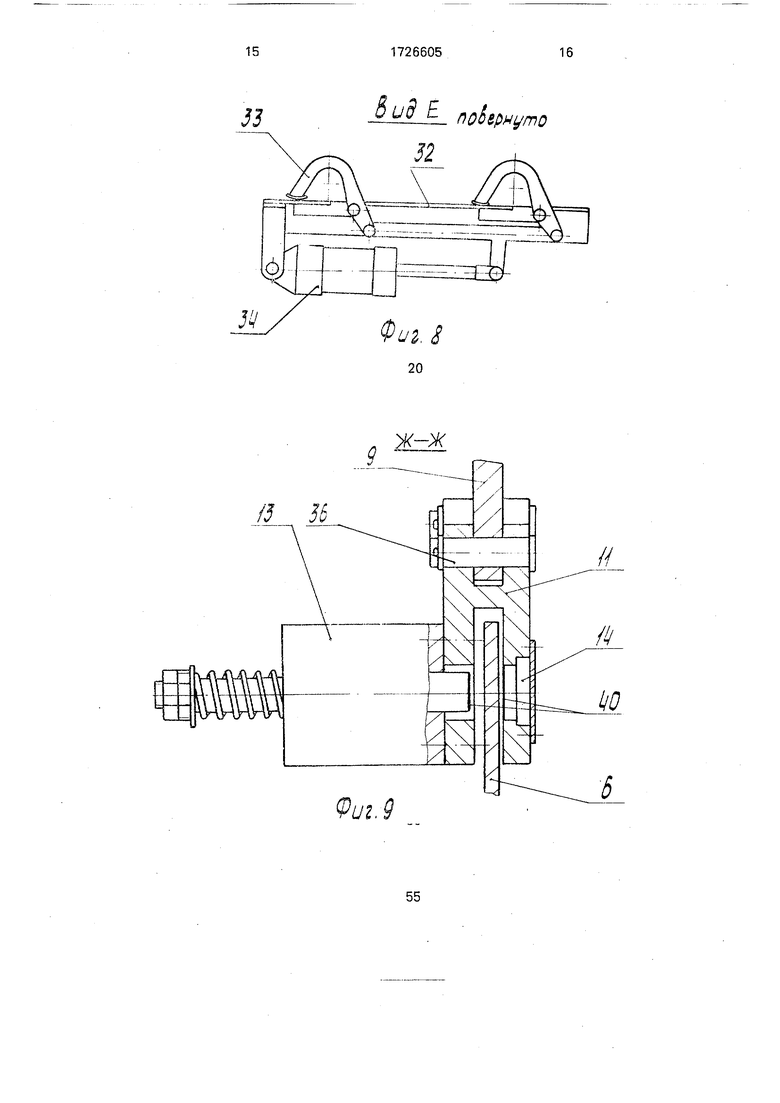
К верхнему торцу рейки 19 закреплена платформа 31, представляющая собой площадку 32 (фиг.8) на два места укладки изде0 лий (например, в тару).
Механизм для раскладки изделий состоит из двух пневмоприжимов 33, управляемых пневмоцилиндром 34.
На корпусе каждой щеки 9 схвата 8 ус5 тановленэ ось 35 (фиг.4), взаимодействующая с продольным пазом, выполненным в кронштейне 10, содержащем губки для носка изделия. Кронштейн 11 закреплен на щеке в двух точках: посредством оси 36 и
0 взаимодействующих между собой оси 37 и криволинейного паза 44, выполненного в щеке, При этом кронштейн 11, содержащий губки для пятки изделия, имеет возможность для поворота вокруг оси 36. Кронш5 теин 10 сопряжен с щекой прямолинейным пазом 43 и подпружинен.
На корпусе манипулятора 1 закреплен фотоэлектрический датчик 38, связанный через счетчик импульсов (не показан) с таб0 ло 39. Датчик установлен так, что срабатывает при попадании в зону его действия чулочных изделий, зажатых губками схвата 8 и перемещаемых на позицию съема в позиции раскладки,
5 Зажимающие поверхности губок 14 и электромагнитов 13.покрыты эластичным материалом 40 (например, резиной), поэтому порча изделия исключена.
На фиг. 3 показаны положения кронш0 теина 7 в плоскости перемещения форм с изделиями (положение I) и в плоскости платформы приемного механизма (положение II). Перевод кронштейна 7 из положения I в положение I осуществляется поворотом
5 кронштейна 42 вокруг неподвижной оси 41 на угол а при помощи пневмоцилиндра 5. Перевод осуществляется в плоскости разреза Б-Б (фиг. 1).
Устройство работает следующим образом.
При входе суппорта машины 3 с формами 6 в рабочую зону устройства по команде от конечного выключателя срабатывает пневмоцилиндр 4, и его шток со схватом 8 на конце выдвигается на позицию съема. Включаются электромагниты и подвижные губки 13 кронштейнов 10 и 11 прижимают форму с изделием 6 к неподвижным губкам 14. При обратном движении схвата подпружиненный кронштейн 10, в начальный мо- мент поворачиваясь вслед за схватом, проскальзывает своим пазом 43 по оси 35, так как пятка носка препятствует съему без повреждения, если предварительно не стянуть ее с пяточной части формы. В то же время кронштейн 11, увлекаемый схватом, поворачивается вокруг оси 36 и при этом осью 37 проскальзывает по криволинейному пазу 44. При этом кронштейн 11 совершает движение по стрелке, стягивая пятку носка с пяточной части формы. После этого стягивается с формы и весь носок. Совершив указанные движения, кронштейны под действием пружин 12 занимают свои исходные позиции.
После съема изделий с форм и по достижении схватом 8 крайнего верхнего положения срабатывает пневмоцилиндр 5 и при втягивании штока посредством кронштейна 42 переводит кронштейн 7 с цилиндром 4 и схватом 8 на его штоке из положения I в положение II (фиг. 1 и 3). В этом положении схват с изделиями находится вне зоны движущихся по конвейеру форм в плоскости, параллельной плоскости платформы 31 (фиг. 2). В таком положении изделие в схвате цилиндром 4 переносится к платформе 31 и удерживается над ней.
При переносе изделия водило 29 на штоке цилиндра 4 (фиг.1), воздействуя на рычаг 30, опускает платформу 31 приемным механизмом 2 на один шаг его зубчатой рейки 19 (фиг.6). Опускание платформы на один шаг необходимо для приема на освободившееся место очередного изделия.
Удерживаемое над платформой в схвате изделие от пневмоцилиндра 34 (фиг.8) прижимами 33 прижимается к поверхности площадки 32. После этого губки схвата
разжимаются, освобождая изделие, шток пневмоцилиндра 4 со схватом возвращается в исходное положение, оставляя изделие на платформе. Кронштейн 7 пневмоцилинд- ром 5 возвращается в положение I. Прижимы 33 поднимаются. Цикл завершен. Аналогично осуществляются съем, перенос и укладка одно на другое на платформу последующих изделий.
Использование изобретения позволяет практически исключить оставление изделий на форме или их повреждение, а также обеспечивает качественную укладку готовых изделий в стопу.
Формула изобретения Устройство для съема с отделочных форм и укладки носочных изделий, содержащее два схвата с губками из эластичного материала и с приводами перемещения губок, привод перемещения схватов по заданной траектории, механизм для раскладки изделий и приемный механизм, включающий платформу для укладки изделий, снабженную средством для шаговой подачи платформы в вертикальном направлении, отличающееся тем, что, с целью повышения надежности работы, каждый схват содержит две губки соответственно для пятки и носка изделия, закрепленные на кронштейнах, подпружиненных относительно корпуса схвата, при этом кронштейн с губками для носка изделия связан с корпусом схвата посредством взаимодействующих между собой оси и паза, выполненного в корпусе в продольном относительно кронштейна направлении, а кронштейн с губками для пятки изделия связан с корпусом посредством двух осей с возможностью поворота кронштейна вокруг одной оси, при этом другая ось размещена в криволинейном пазу, выполненном в корпусе, а средство для шаговой подачи выполнено в виде реечно-храпового механизма, верхняя часть рейки которого соединена с платформой, нижняя подпружинена, а собачка храпового колеса установлена с возможностью взаимодействия с приводом перемещения схватов.
ВидА
5ид в
9игМ
