щей стороны (отстающего двигателя), В начале и в процессе движения эта информация в дальнейшем служит для управления работой электродвигателя. После разгона электродвигателей в асинхронном режиме осуществляют перевод асинхронных двигателей в синхронизированный режим с нулевым скольжением путем подачи в обмотки роторов постоянного тока от внешнего источника. Причем одновременный перевод обоих асинхронных двигателей в синхронизированный режим работы осуществляют только в случае отсутствия перекосов сто- рон затвора или при его допустимом значении. При наличии недопустимого перекоса в синхронизированный режим работы с нулевым скольжением переводят сначала отстающий двигатель, а после уменьшения перекоса до допустимого значения переводят в синхронизированный режим работы с нулевым скольжением второй двигатель.
Способ реализуется следующим образом.
По сигналу на открытие или на закрытие затвора включают в сеть асинхронные дви- гатели с фазным ротором правой и левой сторо.ны затвора одновременно. Происходит разгон двигателей с шунтированием секций роторных пусковых резисторов, По окончании пуска оба двигателя одновре- менно переводят в синхронизированный режим работы с нулевым скольжением пу- тем включения постоянного тока в обмотки ротора, если контактный указатель переко- са показывает нулевой или незначительный, допустимый перекос. Если перекос выше допустимого, то с помощью контактного указателя перекоса определяется отстающий двигатель и именно этот двигатель по окончании кратковременного пускового периода в первую очередь переводят в синхронизированный режим работы с нулевым скольжением путем подачи постоянного тока в роторные обмотки. Перекос при этом уменьшается, так как отстающий двигатель теперь, наоборот вращается быстрее, чем другой двигатель. При достижении заданного значения перекоса меньшего значения .переводят в синхронизированный режим работы с нулевым скольжением второй двигатель путем подачи постоянного тока в его роторные обмотки. Таким образом, в обоих случаях основным рабочим режимом двигателей является синхронизированный ре- жим с нулевым скольжением, благодаря чему обеспечивается и синхронное движение сторон затвора, так как двигатели жес- j тко связаны с концами затвора.
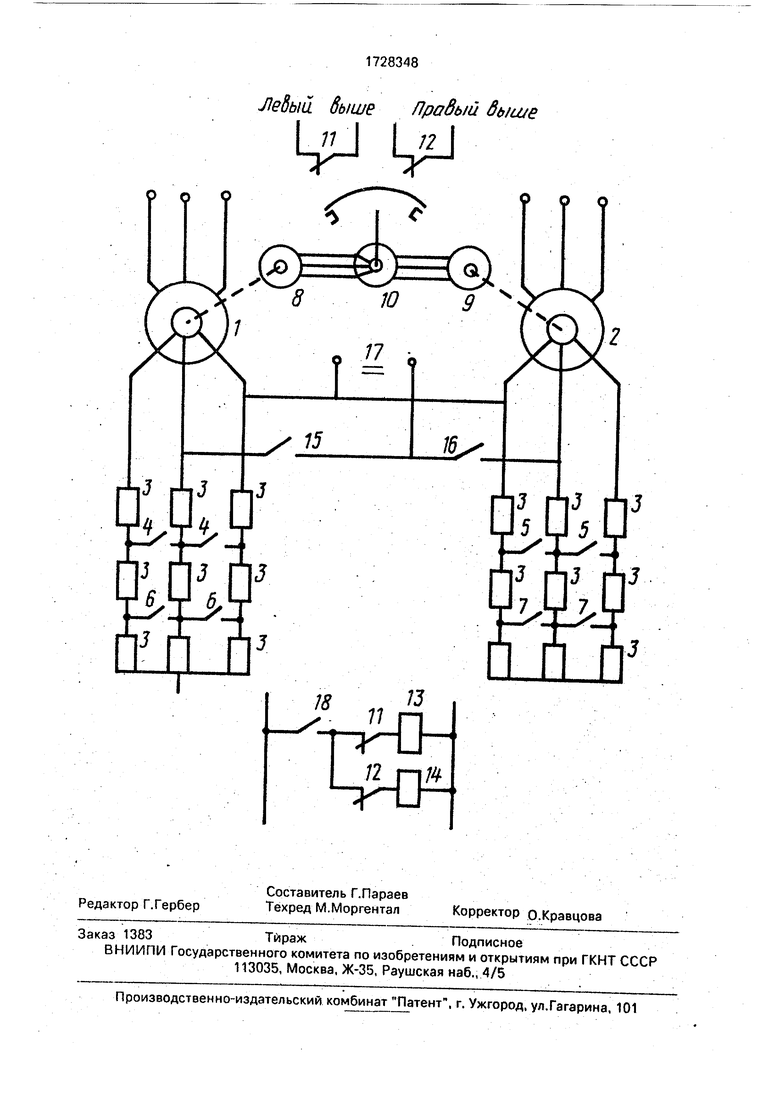
На чертеже представлена электрическая
схема устройства, реализующего предлагав-
мый способ.
Устройство содержит асинхронные двигатели : левый 1 и правый 2 с фазным ротором пусковые резисторы 3, контакты 4-7 силовых контакторов, шунтирующие эти резисторы, сельсинный контактный указатель перекоса, состоящий из сельсинов 8 и 9, жестко связанных с осями главных двигателей 1 и 2, дифференциального сельсина 10 и регулируемых размыкающихся при максимально допустимом перекосе контактов 11 (Левый выше) и 12 (Правый выше). Эти контакты включены, в свою очередь, в цепь катушек 13 и 14 промежуточных реле, замыкающие контакты 15 и 16 которых, в свою очередь, включены в цепи, соединяющие источник 17 постоянного тока с роторными цепями двигателей. В цепях катушек 13 и 14 реле имеется также общий контакт 18 реле времени. Источник постоянного тока может быть любым, например выпрямитель с понижающим трансформатором, включенным в общую сеть переменного тока.
Устройство работает следующим образом.После включения двух двигателей 1 и 2 в сеть они разгоняются при полностью введенных роторных резисторах. В течение короткого промежутка времени секции роторных резисторов 3 шунтируются контактами 4-5, а затем 6-7 силовых контакторов ускорения, и двигатели начинают работать с близкими к естественным механическими характеристиками. По окончании пуска с небольшой выдержкой времени, определяемой контактом 18 реле времени, получают питание катушки 13 и 14 промежуточных реле, вследствие чего замыкаются их контакты 15 и 16, но при условии, что замкнуты и контакты 11 и 12 сельсинного указателя перекоса, что имеет место при нулевом или допустимом перекосе (когда стрелка указателя, жестко связанная с валом и ротором дифференциального сельсина 10, не касается этих контактов 11 и 12). В этом случае в роторные обмотки обоих двигателей подается постоянный ток от внешнего источника 17, двигатели втягиваются в синхронизм и далее работают, как синхронные, с нулевым скольжением, чем и обеспечивается синхронное движение сторон затвора.
В случае, если к моменту включения постоянного тока в роторные обмотки имеется перекос, превышающий максимально допустимую величину, один из контактов указателя перекоса (например, контакт 11 - Левый выше) окажется разомкнутым, катушка 13 - обесточенной, силовой контакт 15 - также разомкнут, и постоянный ток будет подан двигатель, в данном случае -правый 2, отстающий. Именно этот
двигатель в первую очередь перейдет в синхронный режим с нулевым скольжением и будет вращаться быстрее, чем левый двигатель, остающийся в обычном асинхронном режиме. Так будет продолжаться дотехпор, пока указатель перекоса не вернется в зону допустимых значений перекоса, замкнув свой контакт 11 и, следовательно, катушку 13 и силовой контакт 15, после чего постоянный ток будет подан и в роторную обмот- ку левого двигателя 1, последний перейдет в синхронный режим работы с нулевым скольжением, и далее движение сторон затвора будет синхронизировано.
При каждом пуске, если окажется необ- ходимым, за счет сдвига во времени моментов перехода в синхронизированный режим осуществляется корректировка, устранение накопленного к этому времени перекоса.
Внедрение предлагаемого способа уп- равления электроприводом затвора позво- ляет отказаться от дополнительных устройств типа специальных синхронизирующих двигателей или дросселей насыщения, повысить надежность и эксплуатационные характеристики электропривода за счет более простой электромеханической схемы и за счет некоторого повышения скорости затвора, улучшить энергетические показатели, так как двигате- ли в синхронизированном режиме будут работать при меньших токах, более высоких КПД и cos p
Так, по данным из приведенных выше источников и по данным испытания лабора- торного макета у асинхронных двигателей
при переводе их в синхронизированный режим работы ток статора уменьшается на 20% (а ток холостого хода - на 30-40 %), cose/) возрастает до 0,94-0,96, синхронная частота вращения также при всех условиях выше на 10-15%, чем номинальная частота вращения в обычном асинхронном режиме, что обеспечивает и повышение скорости перемещения затвора на ту же величину. Формула изобретения
. Способ управления электроприводом затвора гидротехнического сооружения, включающий пуск и разгон электродвигателей в асинхронном режиме и измерение величины отставания одной стороны затвора относительно другой, отличающийся тем, что, с целью повышения надежности и быстродействия управления электроприводом затвора, задают предельное значение отставания одной стороны затвора относительно другой, сравнивают его с измеренной величиной этого параметра и одновременно переводят электродвигатели после завершения разгона в синхронный режим работы с нулевым скольжением путем подачи в обмотки роторов постоянного тока от внешнего источника, если первая величина превышает вторую, в противном случае в синхронный режим работы переводят сначала электродвигатель отстающей стороны, а при достижении равенства измеренной и предельной величин отставания одной стороны затвора относительно другой в синхронный режим работы переводят электродвигатель другой стороны затвора.
Мейый. выше Правый выше
UJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ синхронизации асинхронного электродвигателя | 1980 |
|
SU955485A1 |
| Механический каскад двух трехфазных асинхронных двигателей | 1940 |
|
SU90515A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Двухдвигательный электропривод переменного тока | 1986 |
|
SU1410265A2 |
| Устройство для управления бесперекосным движением гидротехнического затвора | 1980 |
|
SU885977A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| Устройство для возбуждения синхронногодВигАТЕля | 1979 |
|
SU828348A1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2050684C1 |
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
Изобретение относится к гидротехнике, а именно к автоматизации управления электроприводом гидротехнических сооружений, и может быть использовано для обеспечения синхронного движения двух сторон затвора с помощью двух электродвигателей. Цель изобретения - повышение надежности и быстродействия управления электроприводом затвора. При необходимости маневрированием (закрытия или открытия) затвора включают в трехфазную сеть питания два асинхронных двигателя с фазным ротором привода затвора (правый и Изобретение относится к автоматизации управления электроприводом гидротехнических сооружений и может быть использовано для обеспечения ускоренного, синхронного, без перекосов движения на двух сторонах гидротехнического затвора с помощью двух электродвигателей. Цель изобретения - повышение надежности и быстродействия управления электроприводом затвора. левый). При этом измеряют перекос затвора, например, с помощью сельсинного контактного указателя перекоса и определяют отстающий двигатель в начале и в процессе движения. После разгона двигателей с помощью переключения, пусковых роторных резисторов асинхронные двигатели переводят в синхронизированный режим работы с нулевым скольжением путем подачи в обмотки роторов постоянного тока от внешнего источника. При этом переводят оба двигателя в синхронизированный режим работы одновременно при условии отсутствия перекоса сторон затвора или при допустимом перекосе. При наличии же недопустимого перекоса в синхронизированный режим работы переводят сначала отстающий двигатель, а после уменьшения перекоса до заданного значения в синхронизированный режим работы переводят второй двигатель. Поскольку валы двигателей жестко связаны через редукторы с левым и правым краями затвора, то синхронизация двигателей обеспечивает также и синхронизацию перемещения краев затвора. 1 ил. Способ управления электроприводом затвора гидротехнического сооружения содержит операции включения двух асинхронных двигателей для перемещения сторон затвора в пусковый режим и коммутацию шунтирующих сопротивлений в роторных обмотках этих двигателей в течение времени разгона электродвигателей. Кроме того, способ включает измерение перекосов затвора с помощью сельсинного контактного указателя перекоса и определение отстаю(Л С -ч ю 00 со 4. со
18П
1б ;7
| Следящий электропривод | 1957 |
|
SU115113A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
