Изобретение относится к машиностроению, точнее к устройствам для измерения сил резания на металлообрабатывающих станках,,
Известно устройство, содержащее три упругих контура, два из которых - разомкнутые и один - замкнутый, что приводит к различным условиям работы датчиков перемещений, установленных в пазах и карманах этого динамометра, уменьшает жесткость динамометра по двум направлениям, что ограничивает частотный диапазон динамометра и не обеспечивает точных измерений полной силы резания о В нем отсутствует механизм предварительной затяжки стыков,
следовательно, данная конструкция не может быть использована с магнитоуп- ругими датчиками силы.
Целью изобретения является повы- ще.ние точности измерения силы реза- ния о
Указанная цель достигается тем, что в динамометр для измерения сил резания, содержащий выполненные за одно целое неподвижную и три подвижные жесткие платформы прямоугольной формы,,связанные друг с другом упругими направляющими поступательного перемещения с возможностью перемещения каждой из подвижных платформ по одному из трех взаимно перпендикуляр sj
со ю
со со.
3173
ных направлений, и расположенных между платформами преобразователей, введены механизмы предварительной затяжки стыков между платформами и преобразователями, каждый из которых выполнен в виде пары сопряженных клиновых опор с углом наклона, меньшим угла трения в паре, и установленных с возможностью взаимного перемещения и фиксации относительно друг друга, при этом преобразователи выполнены в виде датчиков силы, упругие направляющие поступательного перемещения соединены с противоположными сторонами каждой из платформ, а каждый датчик силы связан с соответствующей парой платформ через механизм предварительной затяжки стыковв
v Путем выполнения корпуса за одно целое в випе тоех подвижных и неподвижной платформ, связанных друг с другом упругими направляющими поступательного перемещения, составляющими в совокупности вложенные замкнутые контуры, повышается его жесткость Посредством выполнения механизма натяга датчиков в виде пары сопряженных клиновых опор с углом наклона, меньши угла трения в паре, повышается жесткость упругих направляющих поступательного перемещения за счет значительного уменьшения податливости в стыкахо
Эффект самоторможения датчика в корпусе динамометра достигается за счет применения пары подвижный - неподвижный клин с углом самоторможе- о
ния 2, Винтовой механизм позволяет -перемещать подвижный клин вдоль наклонной полости неподвижного клина и создавать необходимый (расчетный) предварительный натяг датчика, е также производить разборку соединения, в случае необходимой замены датчика.
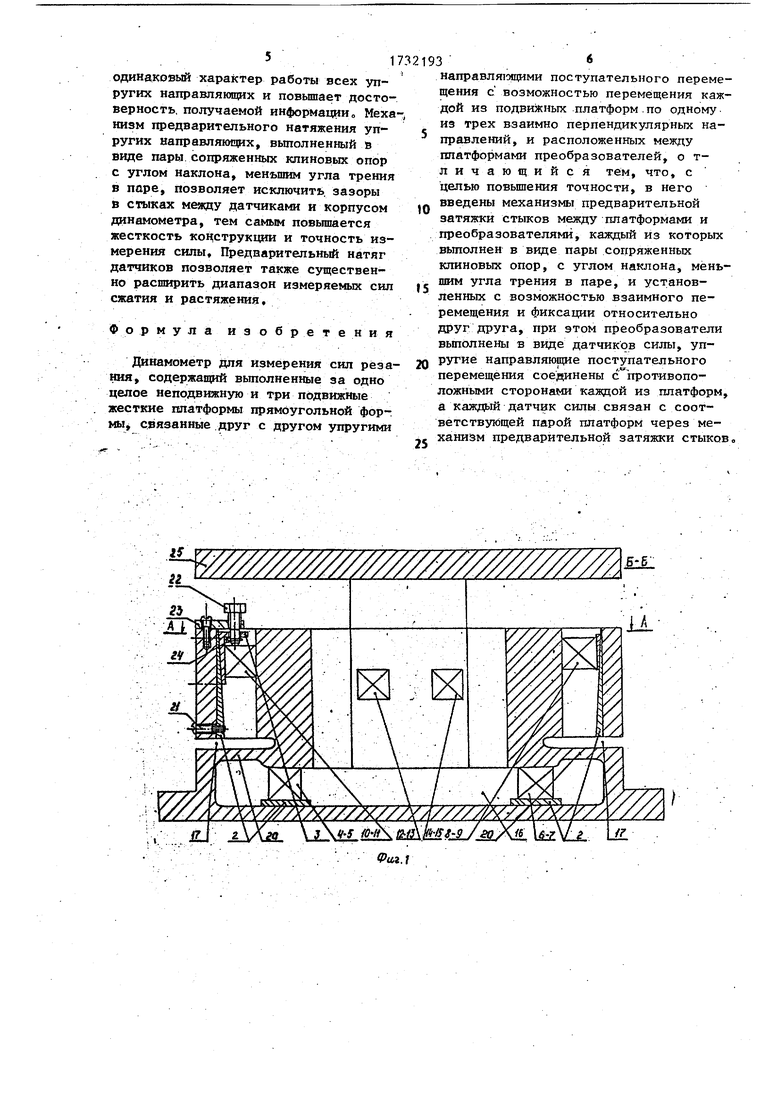
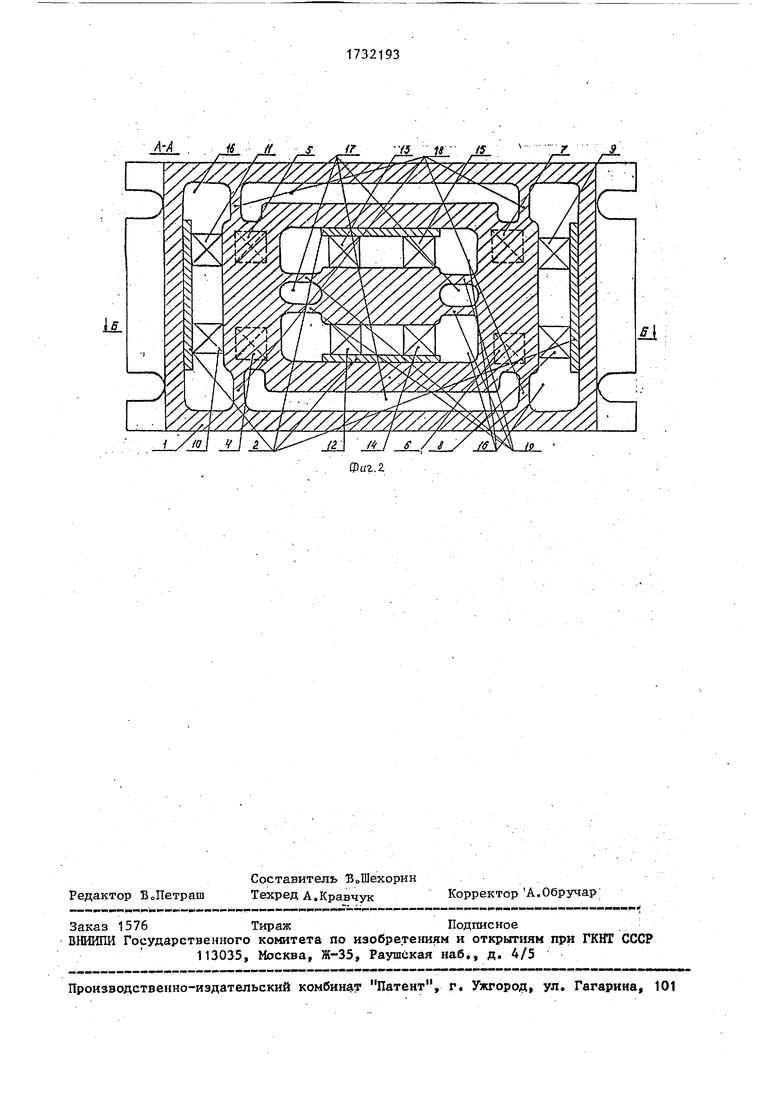
На фиг, 1 и 2 изображено устройство, взаимные разрезы А-А и Б-Б,
Устройство состоит из корпуса 1, не- подвижных клиньев 2, подвижных клиньев 3 и преобразователей 4-15. Посредством механической или электрофизической выборки рабочих 16 и вспомога- тельных 17 полостей и карманов обр.азо ваны упругие направляющие 18 поступд- тельного перемещения, работающие до координате X, 20., 2 соответственное Упругие направляющие и карманы в совокупности образуют. три подвижные жесткие платформы, каж-ч
0
S
0
5
дая из которых имеет податливость только в одном направлении (по координатам X, Y и Z), Неподвижные клинья 2 закреплены в корпусе динамометра посредством винтов 21, а подвижные клинья 3 перемещаются при помощи винтов 22, установленных в планках 23 и зафиксированных в подвижных клиньях шплинтами 24, Исследуемый образец устанавливается на крышку 25, приваренную к внутренней части корпуса динамометра.
Устройство работает следующим образом«
Перед измерением динамометр приводят в рабочее состояние.С помощью болтов 22 всем датчикам задается предварительный натяг. При этом подвижные клинья 3 скользят по неподвижным клиньям 2 и прижимают датчики к стенке динамометра0 Необходимая величина предварительного Натяга контролируется по показаниям датчиков 0 Силы на датчики передаются следующим образом о Сила Ри. через крышку 25 передается непосредственно на внутреннюю подвижную жесткую платформу и воспринимается датчиками 12-15, При этом работают лишь упругие на правляющие 19. Остальные упругие направляющие имеют в данном направлении высокую жесткость, поэтому их деформации в данном направлении можно не учитывать. Сила Рх передается
35 через крышку 25, упругие направляющие 19, имеющие высокую жесткость в направлении X, на вторую вложен- ную жесткую платформу и воспринимается датчиками 8-11, При этом работают
40 упругие Направляющие 18, Сила Р2 передается на третью наружную плат-г форму через крышку 25, упругие направляющие 19, имеющие большую жесткость в направлении Z, Она восприни45 мается датчиками 4-7, причем работают упругие направляющие 20, Общая сила резания раскладывается на компоненты РХ, Р и Р и фиксируется , соответствующими группами датчиков,
50 Положительный эффект по сравнению с известным устройством заключается в повышенной жесткости KOHCT-I рукции и .более широком частотном диапазоне работы динамометра, что
55 приводит к повышению точности измерения силы резания, В конструкцию предлагаемого динамометра заложен принцип замкнутых контуров по всем трем координатам, что обуславливает
одинаковый характер работы всех упругих направляющих и повышает достоверность получаемой информации. Механизм предварительного натяжения упругих направляющих, выполненный в виде пары сопряженных клиновых опор с углом наклона, меньшим угла трения в паре, позволяет исключить зазоры в стыках между датчиками и корпусом динамометра, тем самым повышается жесткость конструкции и точность измерения силы. Предварительный натяг датчиков позволяет также существенно расширить диапазон измеряемых сил сжатия и растяжения.
Формула изобретения
Динамометр для измерения сил резания, содержащий выполненные за одно целое неподвижную и три подвижные жесткие платформы прямоугольной формы, связанные друг с другом упругими
направляющими поступательного перемещения с возможностью перемещения каждой из подвижных платформ по одному из трех взаимно перпендикулярных направлений, и расположенных между платформами преобразователей, о т- личающийся тем, что, с целью повышения точности, в него введены механизмы предварительной затяжки стыков между платформами и преобразователями, каждый из которых выполнен в виде пары сопряженных клиновых опор, с углом наклона, меньшим угла трения в паре, и установленных с возможностью взаимного перемещения и фиксации относительно друг друга, при этом преобразователи выполнены в виде датчиков силы, упрутие направляющие поступательного перемещения соединены ( противоположными сторонами каждой из платформ, а каждый датчик силы связан с соответствующей парой платформ через ме, ханизм предварительной затяжки стыков.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛ РЕЗАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2082123C1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| Механизм подачи шлифовальной бабки | 1980 |
|
SU941167A2 |
| Устройство для определения массы тела в невесомости | 1982 |
|
SU1073580A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ РЕЗАНИЯ В МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 1989 |
|
RU2028872C1 |
| КЛИНОВОЕ СОЕДИНЕНИЕ ОБОЛОЧЕК ВРАЩЕНИЯ | 2020 |
|
RU2737023C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ ЭЛЕМЕНТАРНОГО РЕЗАНИЯ | 2016 |
|
RU2661443C2 |
| МЕХАТРОННАЯ СИСТЕМА ФОРМИРОВАНИЯ ИНДИВИДУАЛЬНОГО ИНТРАОПЕРАЦИОННОГО ПОЛОЖЕНИЯ ПАЦИЕНТА | 2022 |
|
RU2803982C1 |
| СИСТЕМА ДЛЯ АКТИВНОГО КОНТРОЛЯ РАЗМЕРОВ ДЕТАЛЕЙ И РЕГУЛИРОВАНИЯ ДЕФОРМАЦИЙ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА | 1989 |
|
RU2014208C1 |
| Координатный механизм | 1988 |
|
SU1737390A1 |
Изобретение относится к машиностроению, в частности к измерению сил резания на металлообрабатывающих станкахо Цель изобретения - повыше, ние точностно Динамометр содержит выполненные за одно целое неподвижную и три подвижные платформы прямоугольной формы, связанные друг с другом упругими направляющими поступательного перемещения, с возможностью перемещения каждой из подвижных платформ по одному из трех взаимно перпендикулярных направлений и преобразователи, расположенные между платформами,. Между преобразователями и плат-1 формами расположены механизмы предварительной затяжки стыков, каждый из которых выполнен в виде пары сопряженных клиновых опор с углом наклона, меньшим угла трения в паре, установленных с возможностью взаимного перемещения и фиксации относительно ДРУГ друга. Преобразователи выполнены в виде датчиков силы, соединенных с соответствующей парой платформ через механизм предварительной затяжки, 2 ил о § W С
III
| Вульф АоМаРезание металлов„-Л,: Машиностроение, 1973, с„118-119„ |
