Изобретение относится к машиностроению и может быть использовано в различных технических процессах, предусматривающих применение манипуляторов.
Цель изобретения - повышение надежности и точности позиционирования манипулятора.
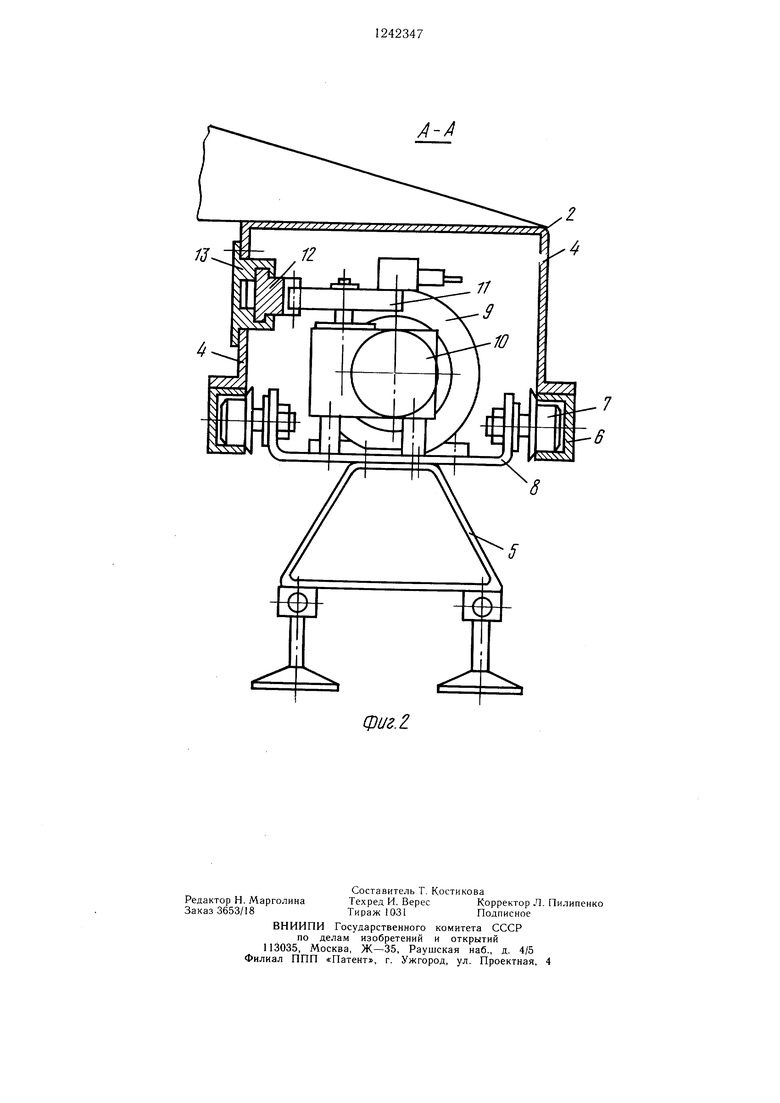
На фиг. 1 изображен манипулятор, общий вид; на фиг.2 - разрез А-А на фиг. 1.
Манипулятор состоит из станины 1 с
тарированы таким образом, что рабочее усилие сжатия больше, чем усилие, возникающее в зубчато-реечном зацеплении при движении площадки 8. Движение площадки 8 начинается тогда, когда период разгона за- верщается и начинается установивщийся режим работы привода. Площадка 8 движется, перемеш,ая захватное устройство 5, до тех пор, пока не войдет в контакт с упругим демпфером 16 упора 15, выставленного в
установленным на ней корпусом 2, который10 требуемое положение. Одновременно шунт
выполнен в виде балки П-образного сечения с17, закрепленный на площадке 8, контакверхней 3 и боковыми 4 .стенками, причемтирует с датчиком 18, установленным на
открытая часть сечения обращена в сторонуупоре 15, в результате чего электродвигарабочей зоны манипулятора для прохода за-тель 9 отключается. После отключения элекхватного устройства 5, продольные пазы 6тродвигателя 9 его вал делает два-три оборопод тела качения, например ролики 7, та, что через червячный редуктор 10 и
зубчато-реечное зацепление вызывает перемещение площадки 8 на 20-25 мм. Так как перемещение площадки 8 ограничивается упором 15, усилие в зубчато-реечном зацеп- 2Q лении, передаваемое зубчаты.м колесом 11, перемещает рейку 12 в направляющих 13, сжимая правую пружину 14. Когда вран;ение колеса 11 прекращается, деформированная пружина 14 через рейку 12 прижимает пло- одадку 8 к упору 15.
закреплены в площадке о, на которой установлен привод, состоящий из электродвигателя 9 с червячным редуктором 10. Посредством зубчатого колеса 11 привод связан с рейкой 12, установленной по краям в направляющих 13, выполненных в корпусе, длина которых в два раза больше рабочего хода пружин 14 сжатия, связанных одним концом с корпусом 2, а другим - контактирующих с рейкой 12 каждая. В обоих концах корпуса 2 с воз- можностью регулировки в продольном направлении установлены упоры 15 с упругими демпферами 16, периодически контактирующими с площадкой 8, на которой на противоположных сторонах закреплены шунты 17, входящие в контакт с датчиками 18 электродвигателя 9. На каждом упоре 15 смонтировано по одному датчику 18.
Манипулятор работает следующим образом.
В момент начала движения усилие, возникающее в зацеплении, направлено на преодоление сил инерции площадки 8 и связанного с ней- захватного устройства 5, что вызывает незначительное перемещение рейки 12 в направляющих 13 и сжатие одной из пружин 14, например правой. Пружины 14
тарированы таким образом, что рабочее усилие сжатия больше, чем усилие, возникающее в зубчато-реечном зацеплении при движении площадки 8. Движение площадки 8 начинается тогда, когда период разгона за- верщается и начинается установивщийся режим работы привода. Площадка 8 движется, перемеш,ая захватное устройство 5, до тех пор, пока не войдет в контакт с упругим демпфером 16 упора 15, выставленного в
та, что через червячный редуктор 10 и
зубчато-реечное зацепление вызывает перемещение площадки 8 на 20-25 мм. Так как перемещение площадки 8 ограничивается упором 15, усилие в зубчато-реечном зацеп- лении, передаваемое зубчаты.м колесом 11, перемещает рейку 12 в направляющих 13, сжимая правую пружину 14. Когда вран;ение колеса 11 прекращается, деформированная пружина 14 через рейку 12 прижимает пло- одадку 8 к упору 15.
При движении в обратном направлении вправо зубчатое колесо 11, вращаясь в начале движения, перемещает незначительно рейку 12, сжимая левую пружину 14. Движение площадки 8 с захватным устройством 5 начинается тогда, когда усилие в зубчато- реечном зацеплении преодолевает сопротивление сил энергии площадки 8. Дальнейшее движение аналогично описанному.
Применение предлагаемого устройства позволяет с высокой точностью позициоР1иро- вать захватное устройство, перегрузки, возникающие в момент начала движения и при остановке площадки, компенсируются перемещением подпружиненной рейки, установленной в направляющих, что значительно повышает надежность манипулятора.
Аz
фиг. 2,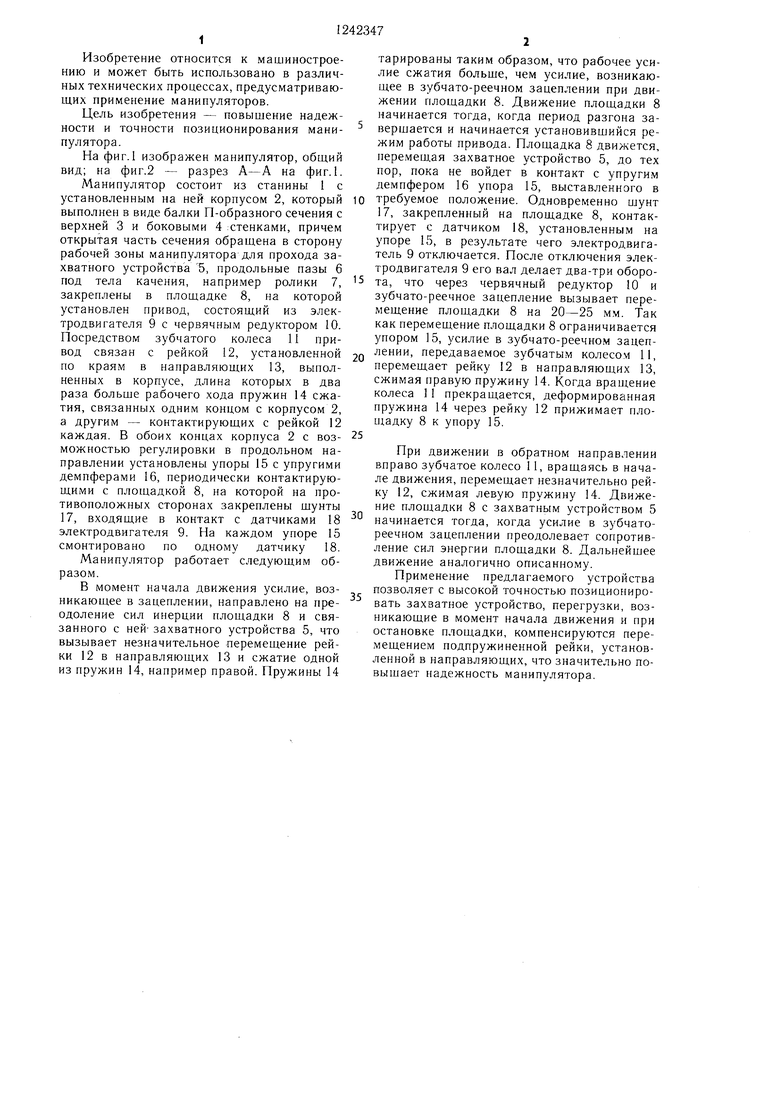
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство манипулятора | 1985 |
|
SU1306711A1 |
| Привод | 1985 |
|
SU1260608A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Устройство для укладки цилиндрических изделий в тару | 1987 |
|
SU1442456A1 |
| Манипулятор | 1987 |
|
SU1458204A1 |
| Манипулятор | 1985 |
|
SU1308463A1 |
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| Устройство для отделки зубьев конических колес | 1983 |
|
SU1177017A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Автооператор сборочного автомата | 1987 |
|
SU1442360A1 |
| Манипулятор | 1979 |
|
SU850372A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
