Изобретение относится к системам автоматического управления (САУ), содержащих нелинейные звенья типа насыщение и подверженных воздействию гармонических помех, параметры которых близки к параметрам полезного управляющего сигнала, и является усовершенствованием известного устройства по авт.св. 643827.
В основном изобретении непрерывный привод содержит два замкнутых контура, первый из которых содержит усилитель, суммирующий силовой механизм и блок обратной связи, а второй контур состоит из моделей указанных блоков первого контура. Кроме того, известный непрерывный привод содержит последовательно соединенные между собой блок с зоной нечувствительности, фиксатор ограничения и блок коммутации в виде реле с задержкой на отключение, размыкающие контакты которого включены в цепь между выходом усилителя и первым входом силового механизма, а замыкающие контакты реле - между выходом модели усилителя и входом силового механизма. Эти размыкающие и замыкающие
контакты выполняют функцию переключающей контактной группы. Входы усилителя и его модели подключены к входу блока с зоной нечувствительности. Второй вход фиксатора ограничения соединен с выходом силового механизма, зона ограничения которого равна зоне нечувствительности блока с зоной нечувствительности. В момент достижения выходным валом силового механизма ограничительных упоров срабатывает фиксатор ограничения, который с помощью контактов реле блока коммутации отключает выход усилителя от первого входа силового механизма и подключает вместо этого усилителя выход модели усилителя к второму входу силового механизма Эта коммутация осуществляется на время нахождения привода в режиме подрезания колебательной составляющей управляющего сигнала САУ, в которой непрерывный привод включен в качестве исполнительного устройства, например рулевого привода летательного аппарата, и позволяет вывести выходной вал силового механизма этого привода из зоны ограничения раньше, чем
сл
VI
со
J
О VJ
ю
выйдет его входной сигнал из зоны ограничения. При этом время подключения модели привода не превышает периода собственных колебаний объекта регулирования. За счет преждевременного снятия с ограничительных упоров выходного вала силового механизма привода образуется форсировка управляющего сигнала САУ, что позволяет в соответствии с известным способом компенсации влияния ограничения устранить этот отрицательный эффект ограничения и улучшить тем самым динамические свойства и устойчивость условно-устойчивых САУ, например летательных аппаратов.
Недостаток непрерывного привода состоит в низком качестве регулирования, так как компенсирующая форсировка выходного сигнала привода образуется только в течение одного единственного первого периода его изменения. В последующие периоды изменения колебательной составляющей управляющего сигнала выходной вал силового механизма и его модели двигаются синхронно и синфазно. Никакой компенсирующей форсировки в эти периоды времени не образуются, что свидетельствует о не высоком качестве регулирования. Кроме того, при формировании компенсирующего положительного фазового сдвига преждевременным снятием с ограничительных упоров выходного вала привода происходит нежелательное уменьшение среднего значения его выходной координаты, что ограничивает область применения привода только теми САУ, годограф амплитудной фазовой частотной характеристики (АФЧХ) которых в разомкнутом состоянии проходит вблизи и параллельно отрицательной полуоси на комплексной плоскости, т.е. применим для узкого класса САУ.
Цель изобретения - повышение качества регулирования непрерывного привода путем увеличения формируемого им форсирующего фазового сдвига между выходным и входным его сигналами и путем восстановления среднего значения выходной координаты.
Поставленная цель достигается тем, что в привод введен нуль-орган и второй и третий замыкающие контакты блока коммутации, причем нуль-орган соединен входом через второй замыкающий контакт блока коммутации с входом устройства, а выходом - с дополнительным входом блока коммутации, выход модели усилителя соединен с первым входом силового механизма через третий замыкающий контакт блока коммутации.
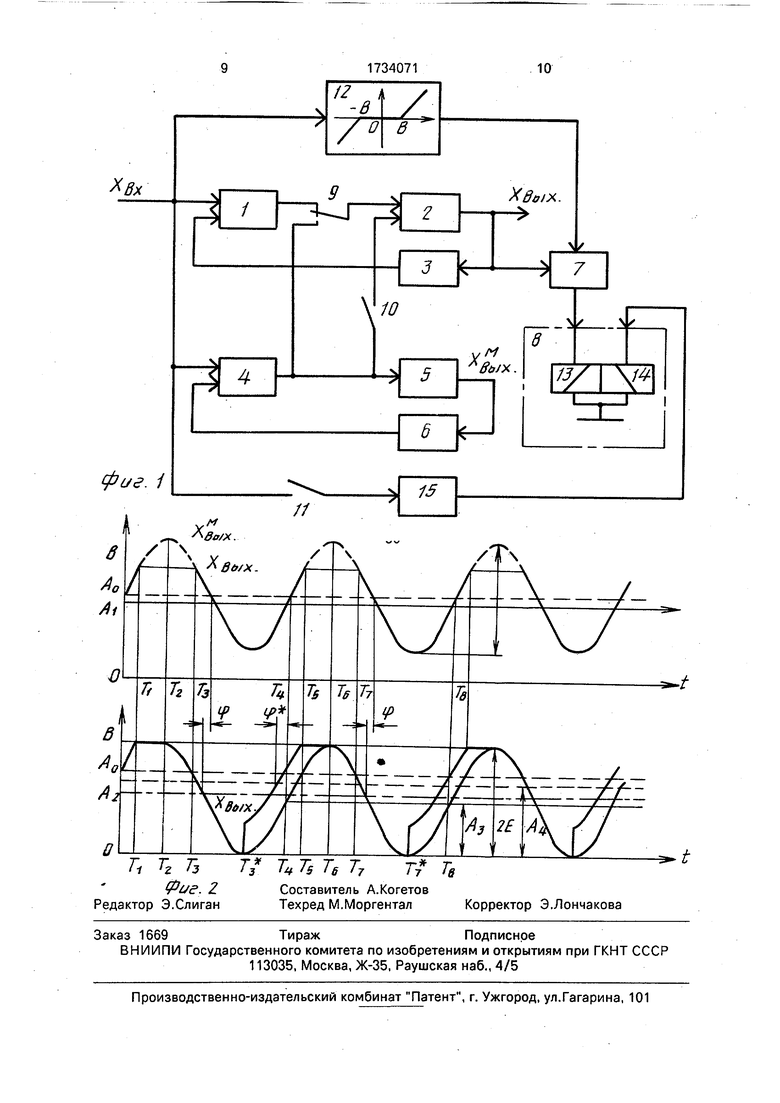
На фиг.1 приведена функциональная схема привода; на фиг.2 - эпюры сигналов,
поясняющие работу привода без компенсации и с компенсацией эффекта ограничения его выходной координаты.
Непрерывный привод содержит усилители 1 и 4, силовой механизм 2 и 5, блоки 3 и 6 обратной связи и их модели, фиксатор 7 ограничения; блок 8 коммутации, переключающий 9, второй 10 и третий 11 замыкающие контакты реле блока 8 коммутации,
блок 12 с зоной нечувствительности, равной зоне ограничения выходной координаты привода, основная 13 и дополнительная 14 обмотки реле блока 8 коммутации, включенные встречно одна другой; нуль-орган 15.
В исходном состоянии цепь входного сигнала привода (фиг.1) подключена непосредственно к входам замкнутых контуров, составленных из усилителя 1, силового механизма 2 и блока 3 обратной связи и их
моделей: 4, 5 и б - через замыкающие контакты 11 к входу нуль-органа 15, а также вход привода подключен через блок 12 к входу фиксатора 7 ограничения. Выход нуль-органа 15 соединен с входом добавочной обмотки 14 реле блока 8 коммутации, переключающий контакт 9 которого включен в цепь между входом силового механизма 2 с одной стороны и выходами усилителя 1 и модели усилителя 4 с другой стороны, а
замыкающий контакт 10 реле - между вторым входом силового механизма 2 и выходом модели усилителя 4.
Устройство работает следующим образом.
Если входной сигнал ХВх не превышает зоны ограничения силового механизма 2, то выходной сигнал ХВых привода совпадает с выходным сигналом Хвых модели силового механизма 5, в котором нет ограничения. На
фиг.2 и 3 этот режим работы привода имеет
место в интервале 0 - TI , Блок 8 коммутации
не срабатывает. На выходе блока 12 с зоной
нечувствительности сигнал отсутствует.
По достижении входным сигналом Хвх
уровня ограничения вал силового механизма 2 тоже достигает ограничительных упоров. Такой режим работы возможен, например, при отработке САУ большего возмущения или это ограничение предусмотрено в целях предупреждения чрезмерных перегрузок на объект управления. Ограничение регулируемой координаты приводом приводит к ухудшению динамических свойств САУ, которая становится вялой.
Среднее значение управляющего сигнала (регулируемой координаты) уменьшается AI АО. В случае управления структурно-неустойчивым объектом управления, каким является беспилотный летательный аппарат,
такое уменьшение среднего значения приводит к потере его устойчивости.
Для устранения этого отрицательного эффекта ограничения предусмотрено подключение с помощью блоков 7 и 8 к входу силового механизма 2 сигнала с выхода модели усилителя 4 через замыкающие контакты 10. При этом с помощью размыкающих контактов переключающей контактной группы 9 отключается выходной сигнал усилителя 1 от первого входа силового механизма 2. Интервал времени, в течение которого находится во включенном состоянии блок 8 коммутации, не превышает периода собственных колебаний объекта регулирования и периодически корректируется выходным сигналом блока 12 с зоной нечувствительности.
Так как модель привода не имеет ограничения по сравнению с приводом, то в момент Та раньше, чем в момент Тз, выходной вал силового механизма 2 сойдет с ограничительных упоров. Это обеспечивает создание форсировки р выходного сигнала Хвых привода в интервале 0 - Т4, хотя среднее значение А2 в этом интервале становится меньше AI, а в последующие интервалы Тз - Та еще меньше. Имеет неравенство вида: АО AI Аа Аз.
Однако за счет форсировки р регулируемой координаты Хвых в основном изобретении компенсируется уменьшение ее среднего значения А2, но только в одном направлении 0 - ТА. В последующие интервалы времени, когда имеет место ограниче- ние регулируемой координаты, компенсирующего фазового сдвига не формируется, что снижает качество регулирования.
Для устранения отмеченного недостатка основного изобретения в дополнительном предусмотрено включение нуль-органа
0
5
0
5
15 через замыкающие контакты 11 реле 13 блока 8 коммутации. После срабатывания этого нуль-органа 15 в момент Тз отключается блок 8 коммутации, так как электромагнитное поле добавочной обмотки 14 направлено против поля основной обмотки 13 реле блока 8 коммутации при поступлении выходного сигнала нуль-органа 15 на вход добавочной обмотки 14. Блок 8 с помощью переключающих контактов 9 отключит выход модели усилителя 4 и подключит выход усилителя 1 к входу силового механизма 2. За счет этого переключения вал силового механизма 2 устремится достигнуть ограничительных упоров к очередному моменту Тв. Однако при этом опять включатся в работу указанные выше блоки и в момент Те вал силового механизма 2 преждевременно сойдет с ограничительных упоров. Такое изменение движения выходного вала, показанное на фиг.З жирной линией, обеспечивает создание не только компенсирующей форсировки р для любого периода изменения регулируемой координаты, но и даже стабилизацию ее среднего значения, так как имеет: А4 Аз А2, что подтверждает повышение качества регулирования нелинейного привода.
Формула изобретения Непрерывный привод по авт.св. Мг 643827, отличающееся тем, что, с целью повышения качества регулирования, в него введены нуль-орган и второй и третий
замыкающие контакты блока коммутации, причем нуль-орган соединен входом через второй замыкающий контакт блока коммутации с входом привода, а выходом - с вторым входом блока коммутации, выход
модели усилителя соединен с первым входом силового механизма через третий замыкающий контакт блока коммутации.
Вх
7/ Гц Ts T6 Т7
Составитель А.Когетов Техред М.Моргентал
Корректор Э.Лончакова
| название | год | авторы | номер документа |
|---|---|---|---|
| Непрерывный привод | 1976 |
|
SU643827A2 |
| Нелинейный привод | 1975 |
|
SU591810A1 |
| Непрерывный привод | 1982 |
|
SU1137441A2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| Привод | 1977 |
|
SU679933A1 |
| Двухканальная следящая система | 1984 |
|
SU1241188A1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ МОЩНОСТИ ТУРБОГЕНЕРАТОРА | 1971 |
|
SU436325A1 |
| Способ компенсации влияния помех на динамические свойства автоматических систем с ограничением | 1974 |
|
SU540255A1 |
Изобретение относится к системам автоматического управления, содержащим нелинейные звенья типа насыщение и подверженным воздействию гармонических помех, параметры которых близки к параметрам полезного управляющего сигнала. За счет введения нуль-органа и двух замыкающих контактов в блок коммутации улучшаются эксплуатационные свойства непрерывного привода при формировании компенсирующего фазового сдвига между входной и выходной регулируемыми координатами. 2 ил.
| Непрерывный привод | 1976 |
|
SU643827A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
