1
Изобретение относится к области не линейных систем автоматического управления и может быть использовано в системах управления беспилотными летательными аппаратами, содержащих приводы с ограничением регулируемой координаты.
По основному авт. св. № 487374 известен непрерывный привод, который содержит усилитель, силовой механизм с односторонним ограничением, соединенный через блок обратной связи с усилителем, модель усилителя, вход которой соединен со входом усилителя, а выход со входом модели силового механизма без ограничения, соединенной через модель блока обратной связи со входом модели усилителя, кроме того, он содержит последовательно соединенный фиксатор ограничения и блок коммутации, причем вход фиксатора ограничения соединен с выходом привода через нормально замк- ;нутый контакт блока коммутаппт, усй- читепь соединен с силов ым механизмом.
подключенным через нормально разомкнутый контакт блока коммутации и модели усилителя ti .
Недостаток такого устройства состоит в том, что гфи изменении периода собственных колебаний объекта управления время Отпускания блока коммутации не изменйется и остается постоянным на протяжении всего времени работы привода, что приводит к ухудшению точности компенсации влияния ограничения регулируемой координаты на динамические свойства системы автоматического управления, например, беспилотным летательным аппаратом, период собственных колебаний которого может измениться в несколько раз вследствие выгорания топлива во время его полета.
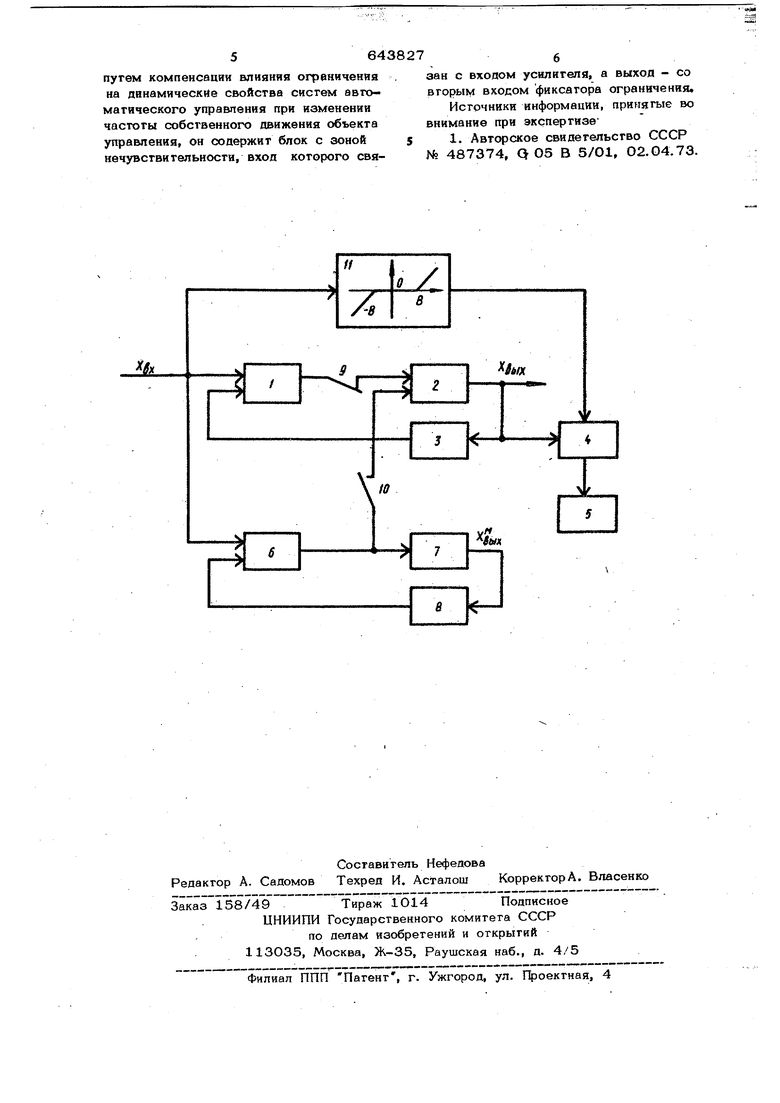
Цель предложенного изобретения - повышение точности путем компенсации влияния ограничения на динамические свойства систем автоматического управления, период собственных колебаний объекта управления которых изменяется во вре тиёнйу -- --- Указанная цель достигается /тем, что в устройство по основному авт. св. № 487374 введен блок с зоной нечувс вительности, вход которого связан со входом усилителя, а выход - со вторым входом фиксатора ограничения. Благодаря подключению этого нелИнейного блока время работы привода под 10 действием сигналов модели привода будет гфопорционально времени прохождения привода в состоянии насыщения что повышает точность компенсации влияния ограничения на динамические свойства систетлы автоматического управления, исполнительным устройством которой является предлагаемый непрерывный привод. Блок-схема привода представлена на чертеже.. Привод содержит усилитель 1, силовой механизм 2с односгсзройнйм ограйИчё-. нием, блок 3 обратной связи, фиксатор 4 ограничения, блок 5 коммутации, модель 6 усилителя, модель. 7 силового меха низ ма без ограничения модель, 8 блока обратной сжязи, контакты 9 и 10 блока коммутации, блок 11 с зоной нечувствительности, пропорциональной зоне действия Ограничительных упоров привода. Предлагаемый привод работает следующим образом. Если входной сигнал Хзх не превышает зоны насьпцения силового Мёханиз ма 2, то выходной сигнал Х, привода совпадает с выходным сигналом Х,( у модели 7 без ограничения. Блок коммутации 5 не срабать1Баёт. По достижении входным сигналом уровня насыщения вал силового механизма 2 привода достигает ограНйчительньгх упоров. Сигнал на выходе привода примет значение ВЫХ БЫХОграничение регулируемой координаты приводом приводит к ухудшению динамических свойств систем автоматическогЬ управления и даже потереустойчивости в случае управления структурно-неустойчивыми объектами регулирования, каким является беспилотный летательный аппарат. Для .устранения этого отрицательного эффекта ограничения согласно изобретению по авт. св. № 487374 предусмотрено подключение с помощью блока коммутации ко входу механизма сигнала с выхода модели усилителя. Блок коммутации включается по команде от фиксатора ограничения и выключается через отрезок времени ц . При этом интервал времени fc х выбирается из условия , где Т -период свободных колебаний системы, в которую включен непрерьшный привод. Так как модель привода не имеет ограничения, то выходной сигнал модели усилителя отрабатывается силовым механизмом привода без искажений 1ограничений), что обеспечивает заданные динамические свойства системы. Однако в случае изменения периода Т собственных (свободных) колебаний системы, например, при значительном изменении массы объекта управления вслед- ствие выгорания топлива, условие Ьц Т не выполняется, что приводит к ухудшению точности компенсации эффекта ограничения. Ппя повышения точности компенсации в предложенном изобретении входной сигнал Xj привода поступает через блок 11 с зоной нечувствительности на вход фиксатора 4 ограничения. Как только SX то по сигналу с выхода блока 11 срабатывает фиксатор 4 ограничения, который В1слючаег блок 5 коммутации. Контакты 9, 1О блока коммутации подключают ко входу силового, механизма 2 цепь выходного сигнала модели усилителя 6. При этом интервал времени подключения модели привода к силовому механизму привода с ограничением прямо пропорционален отрезку времени нахождения системы в состоянии насыщения, т.е. отрезку времени, когда X ;дх « ® зависит от периода Т свободных колебаний системы, что повышает точность компенсации. При использовании предлагаемого привода в системах автоматического управления, период свободных колебаний которых изменяется в значительных пределах. Повышается точность компенсации отрицательного влияния ограничения на динамические свойства такого класса систем. Формула изобретения Непрерывный привод по авт. св. № 487374, отличающийся тем, что, с целью повышения точности
пугем компенсации влияния огреничення на динамические свойства систем авто матического управления при изменении частоты собственного движения объекта управления, он содержит блок с зоной нечувствительности, вход которого связан с входом усилителя, а выход - со вторым входом фиксатора ограничения.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 487374, Q 05 В 5/01, 02.04.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| Непрерывный привод | 1989 |
|
SU1734071A2 |
| Непрерывный привод | 1981 |
|
SU964572A2 |
| Непрерывный привод | 1982 |
|
SU1137441A2 |
| Непрерывный привод | 1973 |
|
SU487374A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РУЛЕВЫМ ПРИВОДОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2681823C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| Следящая система | 1980 |
|
SU962841A1 |
