18 16
Xj«/
СО
4
j;: Изобретение относится к нелинейным системам автоматического управления и может быть использовано в системах управления летательными, аппаратами, приводы которых имеют скоростную характеристику с ограни чением. По основному авт. ев, № 487374 и вестен непрерывный привод, содержащий усилитель, силовой механизм с ограничением, соединенный через блок обратной связи с усилителем, модель усилителя, вход которой соеди нен с входом усилителя, а выход - с входо модели сшювого механизма без ограничения, соединенный через модель блока обратной связи с входом модели усилителя, последовательно соединенные фиксатор огранич ния и блок временной коммутации,при чем вход фиксатора ограничения соединен с входом привода, через нормально замкнутьй контакт блока временной коммутации усилитель соед нен с силовым механизмом, подключенным через нормально разомкнутый контакт блока временной коммутации к модели усилителя П Недостатком известного непрерывного привода является то, что при наличии высокочастотных помех из-задействия ограничения ухудшаются его динамические характеристики. Как следствие этого нарушается режим раб ты систем управления, в контур ко-торых включен привод. Цель изобретения - улучшение дин мических характеристик привода с ограничением скоростной характеристики при наличии высокочастотных помех. Поставленная цель достигается тем, что непрерывный привод дополнительно содержит последовательно соединенные инвертор, усилительсумматор, размыкающий контакт блока временной коммутации и поляризованн релейный элемент, вход инвертора соединен с выходом модели блока обратной связи, выход усилителя через последовательно соединенные размыка юищй контакт блока временной коммутации, первый диод и первйй размыка ющий контакт поляризованного релейн го элемента соединен с первым входо силового механизма привода, которы также соединен через последовательно включенные второй размыкающий контакт поляризованного реле и второй диод с входом первого диода. На чертеже приведена блок-схема непрерывного привода. Привод содержит усилитель 1, силовой механизм 2 с ограничением, блок 3 обратной связи, фиксатор 4 ограничения, блок 5 временной коммутации , модель 6 усилителя, модель 7 силового механизма без ограничения, модель 8 . блока обратной связи, замыкаюпщй 9 и размыкающие IО и 11 контакты блока временной коммутации, инвертор 12, усилитель-сумматор 13, поляризованный релейный элемент 14, первый 15 и второй 16 размыкающие контакты поляризованного релейного, элемента, первый 17 и второй 18 диоды. X. (t) и Х- (t) - соответственно входной и выходной сигналы привода; g(t) и f(t) - соответственно сигналы управления и помехи; g,,(t) - величина сигнала на входе привода, соответствующая .ограничению выходной координаты , . (t )(Yipx - максимально возможная величина сигнала на выходе привода, соответствующая ограничению выходной координаты, (t) сигнал обратной связи привода , Xp(t ) - сигнал обратной связи модели привода; Xu(t) - сигнал на выходе усилителя-сумматора 13; (t) - сигнал ошибки; t - время. Привод работает следующим образом. Предположим, что на. вход усилителя 1 привода подается сигнал Xg(t) g(t ) + f(t). Если f(t) 0, а g(t)gj, (t), то насыщение не происходит, т.е. ъш Фиксатор и привод работает обычным образом. Дополнительные элементы не оказывают влияния на режим работы привода, так как Xu(t) 0. Т&слк f(t)- О, а g(t) g(,(t ), то выходной сигнал привода х Jt) Срабатьюает фиксатор 4 ограничения и подключает источник постоянного напряжения к блоку 5 временной коммутации. Блок коммутащи Срабатьюает и размыкающими контактами 10 отключает вход сило;вого механизма 2 от выхода усилителя 1, размыкающими контактами 11 отключает вход nojmpHSOBaHHoro релейного элемента 14 от выхода усилителя-сумматора 13 и замыкающими контактами 9 подключает вход силового механизма к выходу модели 6 усилителя. Начиная с этого момента выходная координата силового механизма 2 изменяется по закону изменения выходной координаты модели силового м ханизма 7. Через отрезок времени ком мутации t блок временной коммутаци возвращается в исходное положение. Отключение поляризованного релейного элемента 14 от выхода усилителя-сумматора 13 на время коммутации tj, исключает влияние дополнительно введенных элементов на качество работы привода при наличии ограничения выходной координаты силового механизма 2, когда 3(t)gj(t), так как в этом случае Если f{t )0, а gCtf- - f (tT :gQ(t), то I Ход (t )) и, следовательно, Xv.(t) 4 О, срабатывает релейный элемент 14, размыкает, например.размыкающий контакт 15 в цепи усилитель 1-силовой механизм 2 и тем самым исключает прохозкдение отрицательной части (полуволны) сигнала ошибки (t ) на силовой меха;низм 2, что приводит к увеличению составляющей сигнала х ayv (t ) обус ; вы: g(t). ловленной сигналом В моменты времени, когда /Xob(t)/ /XQj.(t)/ релейный элемент 14 возвращается в исходное состояние, замыкает свои размыкающие контакты 15 в цепи усилитель 1 - силовой механизм 2 и привод переходит на обычный для него режим работы. При смене полярности x(t),когда (t)(# срабатывает релейный Элемент 14, размыкает свои . размыкающие контакты 16 и тем самьЫ исключает прохождение положительной части (полуволны ) сигнала ошибки g (t ) на силовой механизм 2,что приводит к увеличению составляющей сигнала х(с), обусловленной сигналом g (t ). Если g(t) f(t)go (t), то привод работает аналогично случаю, когда g(t) О, g(t)ga(t). Положительный эффект от использования предлагаемого изобретения заключается в том, что привод с ограничением скоростной характеристики будет качественно работать при наличии высокочастотных помех, приводящих к уменьшению его динамического коэффициента передачи. Причем влияние высокочастотных помех на динамический коэффициент передачи уменьшается примерно на 75%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модель частотно-импульсного модулятора | 1977 |
|
SU651365A1 |
| Привод | 1974 |
|
SU732800A1 |
| Формирователь квантованного по уровню напряжения ступенчатой формы | 1983 |
|
SU1105907A1 |
| Привод | 1977 |
|
SU679933A1 |
| Устройство для управления четырехфазным двигателем переменного тока | 1983 |
|
SU1138918A2 |
| Устройство для непрерывного горизонтального литья | 1981 |
|
SU996075A1 |
| Непрерывный привод | 1989 |
|
SU1734071A2 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| Непрерывный привод | 1981 |
|
SU964572A2 |
НЕПРЕРЫВНЫЙ ПРИВОД по авт. св. № 487374, отличающи и- с я тем, что, с целью улучшения динамических характеристик привода при наличии высокочастотных помех, он дополнительно содержит последовательно соединенные инвертор,усилитель-сумматор, размыкающий контакт блока временной коммутации и пол 1ризованный релейный элемент, вход инвертора соединен с выходсм модели блока обратной связи, выход усилителя через последовательно соединенные размыкаюпщй контакт блока временной коммутации, первый диод к первый размыкающий контакт поляризованного релейного элемента соединен с первым входом силового механизма привода, который также соединен через последовательно включенные второй размыкающий контакт поляризованного реле и второй диод с входом первого диода. СП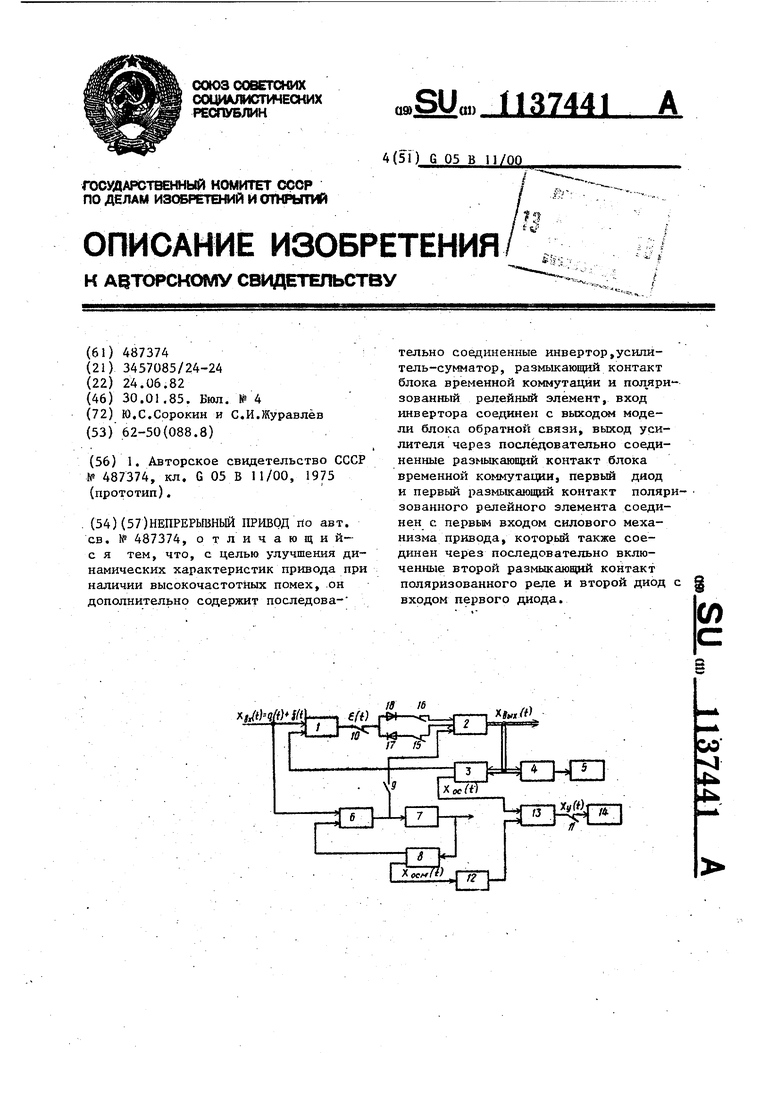
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Непрерывный привод | 1973 |
|
SU487374A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
