Изобретение относится к грузоподъе ным устройствам, а более конкретно к устройствам для подъема преимуществе но цилиндрических изделий, например бо чек.
Известно устройство для подъема , представляющее собсй навешенную на крюк грузоподъемного механизма траверсу с призмами, которые с помощью силового цилиндра сжимают боковые сте| ки поднимаемш о изделия, при этом, поворот изделия осуществляется вручную l.
Однако известное устройство имеет сложную конструкцшо в большую мета; лоемкость, являющуюся следствием бо1шших изгибающих моментов, возникающих на стойках устройства при подъеме изделий больших габаритов..
Известно также устройство для подье ма цилиндрических изделий, содержащее траверсу и подвешенный на ней на гибких стропах захватный орган, представляющвй собой секционный обруч с диаметрально расположенными приводными зажимными элементами 2j.
Однако это устройство не обеспечивает кантования груза, так как при повороте груза в ту или иную сторону происходит или раскрытие захвата, или стропы наматываются на блоки, в результате чего требуются значительные усилия. Кроме того, оно ненадежно в эксплуатации и за отсутствия механизма фиксации захвата в раскрытом положении, а также вероятности возникновения повреждений боковых поверхностей груза, так как груб Ьдавливается с двух стсфон, а у захвата ограничен диапазон охватываемых им rpys зов.
Целью изобретения является обеснече- нве кантования груза и повышение надела ности устройства в работе.
о достигается тем, что каждый зажимный элемент выполнен в виде Kopnyda р конусным отверстием и расположенного в нем клина, имеющего продольный сквознс паз, в котором расположена за1феш1енная в корпусе подпружиненная поп зушка, при этом каждый :строп закреплеЦ на траверсе посредством тяги, шарнирно
связанной с установленным на этой траверсе крошлтейном и состояшей, по крайней мере, из двух подвижн ых относительно друг друга а кронштейна рычагов.
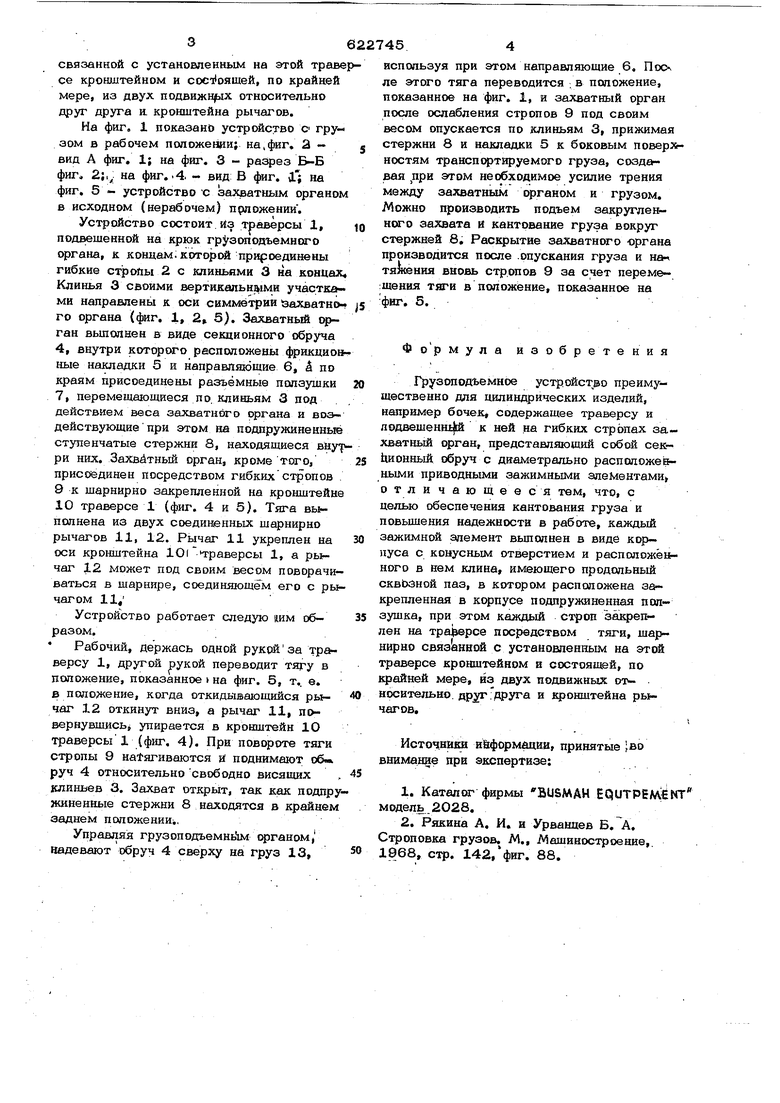
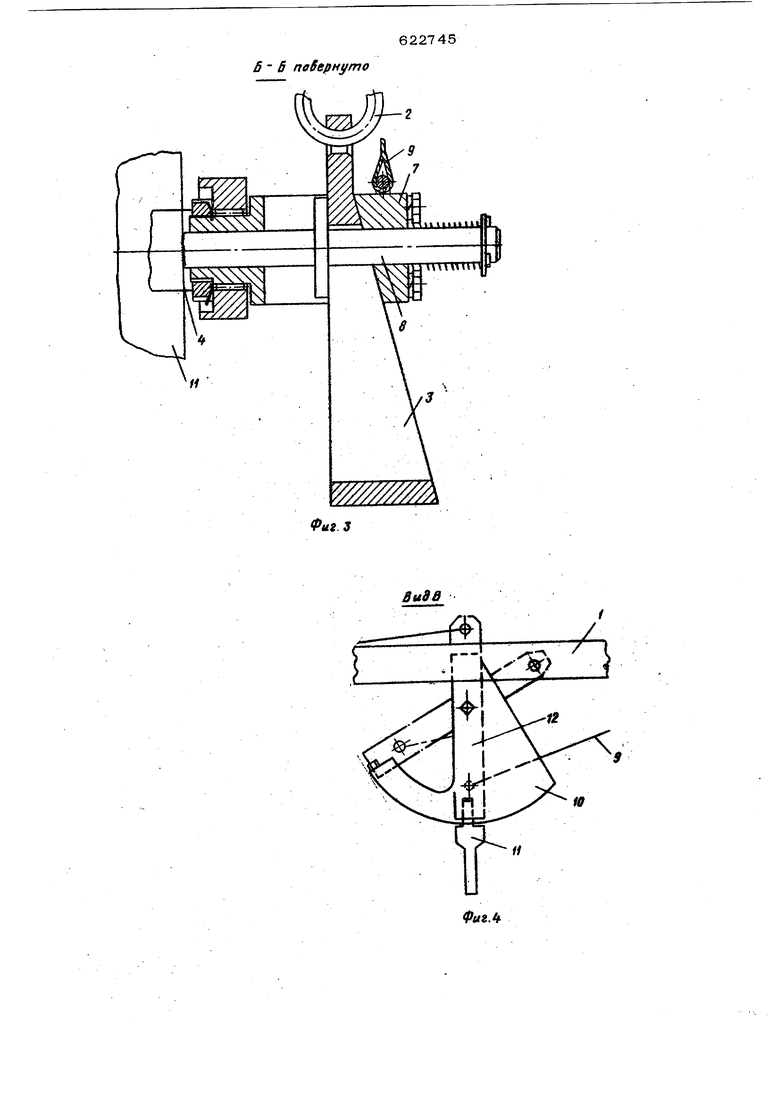
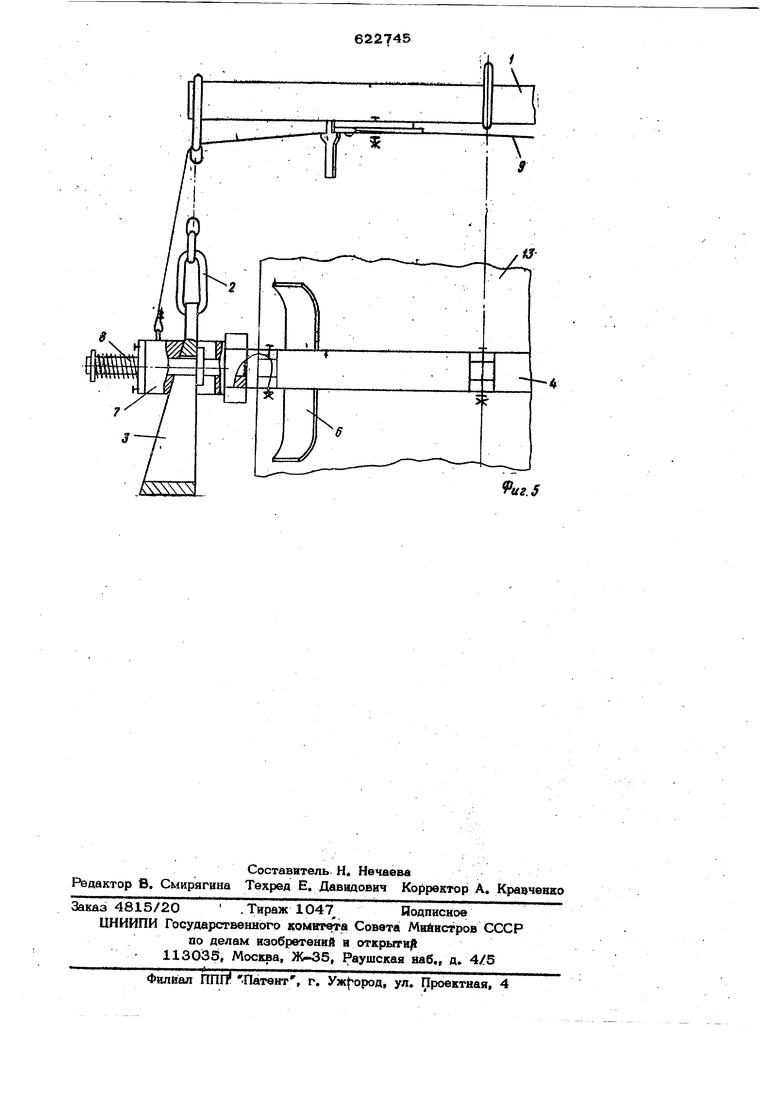
На фиг, 1 показано устройство о грузом в рабочем псяожеири; на,фиг, 2 вид А фиг, 1; на фиг, 3 - &-Б фиг, 2;,| на фиг, .4. - вид В фяг. на фиг, 5 - устройствоС захватным органом в исходном (нерабочем) положении .
Устройство состоит из траверсы 1, подвешенной на крюк rpJraononbeMHaro органа, к концам, которой прироединены гибкие CTJpotiM 2 с клиньями 3 на концах. Клинья 3 своими вертикальными участками направлень к оси симметрии аахватно го органа {фиг, 1, 2, 5), Захватный орган вьшолнен в виде секционного обруча 4, внутри которого расположены фрикционные накладки 5 и направляющие 6, и по краям присоединены разъёмные попаушки 7, перемещающиеся по. клиньям 3 иод действием веса захватного органа и воздействующие при этом на подпружиненнью ступенчатые стержни 8, находящиеся вйутрри них, Захвйтный орган, кроме того,
присоединен посредством гибких стропов . Э к шарнирно закрепленной на кронштейне 10 траверсе 1 (фиг. 4 и 5), Тяга вын попнена из двух соединенных шарнирно рычагов 11, 12. Рычаг 11 укреплен на оси кронштейна lOl траверсы 1, а рььчаг 12 может под своим весом поворачиваться в шарнире, соедин5пощем его с рычагом 11«
Устройство работает следую аим образом.
Рабочий, держась одной рукрйза траверсу 1, другой рукой переводит тягу в положение, показанное t на фиг. 5, т.. е, в положение, когда откидывающийся рмчаг 12 откинут вниз, а рычаг 11, повервувщись упирается в кронштейн 10 траверсы 1 (фиг, 4), При повороте тяги стропы 9 на ягиваются и поднимают об руч 4 относительно свободно висящих , клиньев 3. Захват открыт, так как подпружиненные стержни 8 находятся в крайнем заднем положении.
Управляя грузоподъемнь1М qpraHoM, надевают обруч 4 сверху на груз 13,
используя при этом направляющие 6, Пoc ле этого тяга переводится . в положение, показанное на фиг, 1, и захватный орган после ослабления стропов 9 под своим весом опускается по клиньям 3, прижимая стержни 8 и накладки 5 к боковым поверхностям транспортируемого груза, создавая при этом нео«бходимое усилие трения между захватным органом и грузом. Можно производить подъем закругленного захвата и кантование груза вокруг стержней 8, Раскрытие захватнет о органа производится после .опускания груза и на- тяжения вновь стропов 9 за счет переме:щенЕ1я тяги в положение, показанное на фиг, 5.
Формула изобретения
Грузоподъемное устройст йо преимущественно для цилиндрических изделий, например бочек, содержащее траверсу и я0двешенн1|(й к ней на гибких стропах захватный орган, представляющий собой секционный обруч с диаметрально расположееными приводными зажимными элементами, отличающееся тем, что, с целью обеспечения кантования груза и повьш1ения надежности в работе, каждый зажимной элемент вьшопнен в виде корпуса с конусным отверстием и расположёиного в нем клина, имеющего продольный сквЬзной паз, в котором расположена закрепленная в корпусе подпружиненная ползушка, при этом каждый строп закреплен на траверсе посредством тяги, шарнирно связанной с установленным на этой траверсе кронштейном и состоящей, по крайней мере, из двух подвижных относительно. др.друга и кронштейна рычагов.
Источники ийформации, принятые во внимание при экспертизе:
1,Каталог фирмы BUSMAH EC|UTPБ д€ модель.2028,
2,Рякина А, И, и Урванцев Б, А, Строповка грузов, М,, Машиностроение,. 1968, стр, 142,фиг, 88,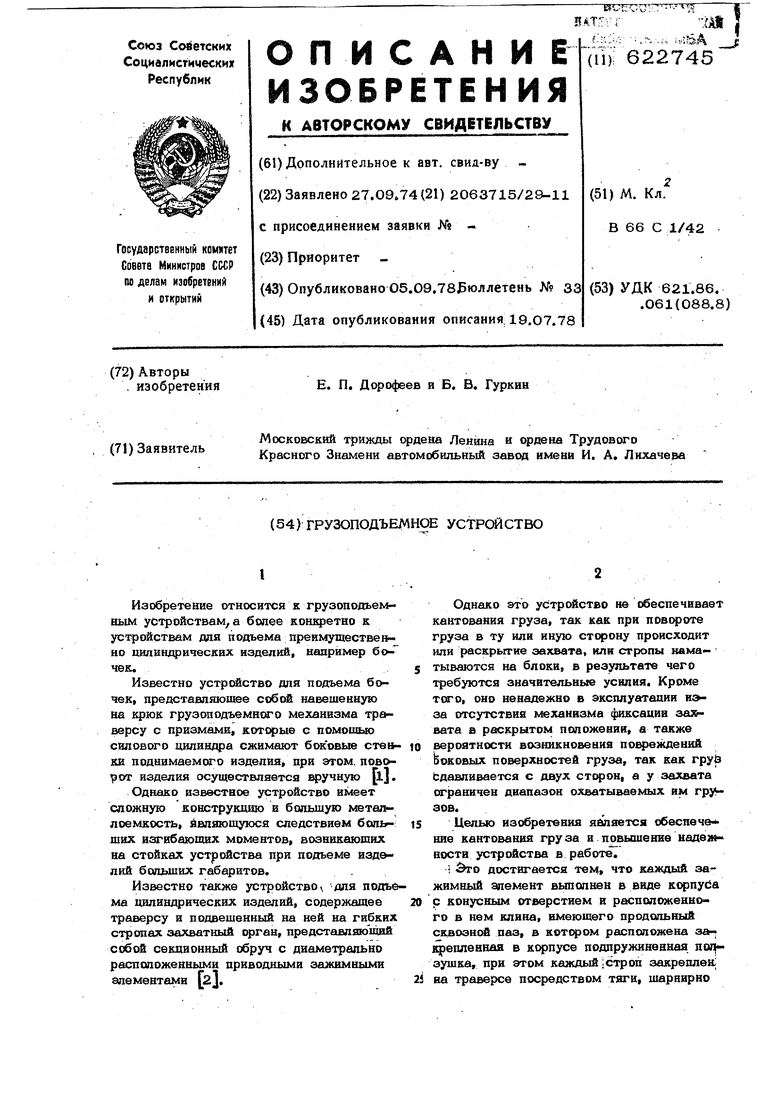
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1728115A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Устройство для кантования изделий | 1988 |
|
SU1675186A1 |
| Захватное устройство для пакетированных грузов | 1976 |
|
SU624866A1 |
| Захват-кантователь | 1990 |
|
SU1782912A1 |
| Траверса -кантователь | 1976 |
|
SU612888A1 |
| Захватное устройство для раскрывающихся емкостей | 1983 |
|
SU1129168A1 |
| Траверса-кантователь | 1980 |
|
SU1065327A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Захват-кантователь | 1983 |
|
SU1137056A1 |
иг.5
