(i) УСТРОЙСТВО УПРАВЛЕНИЯ ИЗГИБНОРАСТЯЖНЫМ АГРЕГАТОМ
Изобретение относится к автоматизации прокатного производства и може быть использовано в системах автоматического управления растяжением металлической полосы на изгибно-растяж ных агрегатах. Известно устройство правки полос комбинированным способом - растяжени ем и знакопеременным изгибом вокруг правильных роликов, в котором требуемое натяжение полосы создается двумя натяжными станциями, установленными до и после изг-ибателя, представляющего собой группу правильных роликов 1, Привод натяжных станций осуществляется от одного электродвигателя постоянного тока через механическую передачу с использованием дифференциального редуктора. Величина пластической деформации, необходимая для коррекции неплоскостности полосы, поддерживается за счет создания разности скоростей вращения тянущих роликов, расположенных до и после изгибателя, с помощью вариатора и второго электродвигателя постоянного тока небольшой мощности, последний из них управляет дифференциальным редуктором. Однако данное устройство при достаточно высоком быстродействии имеет недостаточную точность поддержания разности скоростей вращения тянущих роликов, а следовательно, и величины пластической деформации. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство, управления изгибно-растяжным агрегатом, который содержит изгибатель и две группы тянущих роликов (натяжные станции), расположенные до и после изгибателя С2 1 Данное устройство управления изгибно-растяжным агрегатом выполнено по схеме с индивидуальным приводом каждого тянущего ролика от отдельного электродвигателя. Поддержание требуемой величины пластической деформации (удлинения) осуществляется за счет создания разности скоростей вращения первого и второго тянущих роликов; расположенных непосредственно до; и после изгибателя, Система регулирования скорости вращения каждого из этих роликов по,строена по принципу подчиненного регулирования и состоит из внешнего контура регулирования скорости и под чиненного ему контура регулирования тока якоря двигателей, от которых осуществляется привод тянущих роликов натяжной станции. Каждый внешний контур регулирования скорости включает в себя регул.чтор скорости, на входе которого сигнал с выхода измерителя скорости тян щего ролика (цифровая коррекция действительного значения) сравнивается с сигналом задания опорной скорости. Кроме того, на вход регулятора скорости второго тянущего ролика подается сигнал задания разности скоростей роликов в соответствии с величиной требуемого удлинения. Для перераспределения нагрузки между роликами, входящими в натяжную станцию, выходной сигнал регулятора скорости подается одновременно на вход двух контуров регулирования тока якоря двигателей, от которых осуществляется привод данных тянущих роликов. Для компенсации инерционных масс двигателей и роликов в периоды разгона и торможения на вход контуров регулирования тока подается сигнал, пропорциональный ускорению движения полосы. Контур регулирования тока якоря каждого двигателя поддерживает необхо- 5 димое для заданного удлинения натяжение полосы (момент на валу тянущего ролика) и включает в себя датчик тока, регулятор тока и тиристорный пре- образователь. Повышенная.точность поддержания заданной разности скоростей роликов в этом устройстзе обусловлена наличием сканирующего узла, который осуществляет контроль за удлинением полосы и выдает сигнал на вход регуляторов скорости, корректирующий сиг5055 нал задания разности скоростей тянущих роликов, Сканирующий узел содержит два импульсных датчика скорости (генераторы импульсов), которые механически связаны соответственно; с первым и вторым тянущими роликами. Р ыходные сигналы с импульсных датчиков скорости поступают на вход измерителя удлинения (реверсивные счетчики, управляемые микропроцессом).. В измеритель удлинения входит также узел, осуществляющий коррекцию результата измерения по отношению диаметров первого и второго тянущих .роликов. На выходе измерителя удлинения формируется сигнал, пропорциональный относительной разности линейных скоростей (удлинения) первого и второго тянущих роликов. Измеренное значение удлинения с выхода измерителя удлинения поступает на блок сравнения, где сравнивается с заданным значением удлинения, поступающим с выхода задатчика удлинения о Сигнал рассогласования между заданным и измеренным удлинением с выхода блока сравнения поступает на вход регулятора удлинения (последовательное соединение цифроаналогового умножителя и ПИ-регулят тора) и с его выхода поступает на вход регулятора скорости второго тянущего ролика и а противофазе (через инвертор) на вход регулятора скорости первого тянущего ролика. Так как время измерения измерителя удлинения, зависит от скорости перемещения полосы, то время изодрома регулятора удлинения регулируется выходным сигналом задатчика опорной скорости (обратнопропорционально скорости перемещения полосы). Выходной сигнал регулятора удли- нения корректирует сигнал задания разности скоростей тянущих роликов i, который формируется на выходе блока умножения (цифро-аналоговый умножитель) . На первый вход блока умножения с выхода задатчика удлинения подается сигнал, пропорциональный относитель ной разности линейных скоростей первого и второго тянущих роликов, а на второй вход подается сигнал заДания опорной скорости с выхода задатчика опорной скорости, В данном устройстве предусмотрена коррекция сигнала задания разности скоростей первого и второго тянущих роликов с учетом отношения их диаметров. Сигнал коррекции формируется на выходе блока коррекции по отношению диаметров роликов (после- s довательно соединенные формирователь относительной разности диаметров роликов и цифро-аналоговый умножитель) и подается на вход регулятора скорости первого тянущего ролика. ю
Структура систем регулирования скорости вращения роликов в данном устройстве построена без учета уп- i ругих связей (упругости полосы), что приводит (во избежании возникно- 15 вения колебаний) к снижению быстродействия устройства в целом.
Цель изобретения - повышение быстродействия при сохранении точности.
Поставленная цель достигается зо тем, что в устройство управления изгибно-растяжным агрегатом, включающее две группы тянущих роликов с индивидуальным приводом от двигателей постоянного тока, первая группа ко- 25 торых расположена до изгибателя и непосредственно перед ним содержит первый тянущий ролик, вторая группа расположена после изгибателя и не.посредственно после него содержит зо второй тянущий ролик. Содержащее первый и второй импульсные.датчики и первые и вторые измерители скорости вращения двигателей, механически связанные с первым и вторым тянущи- jj ми роликами соответственно, первые входы контуров регулирования тока якоря приводных двигателей первой и второй групп тянущих роликов соединены с выходами первого и второго Q регуляторов скорости соответственно, вторые входы, соединенные между собой, с выходом блока дифференцирования, первые входы первого и второго регуляторов скорости подсоеди- нены к выходам соответствующих измерителей скорости вращения двигателей, вторые входы - к.выходу задатчика скорости.срединенного с входом блока коррекции, с первыми входами „ первого блфкв умножения и регулятора удлинения, выходы блока коррекции и первого блока умножения соединены соответственно с третьими входами первого и второго регуляторов скорости, четвертый вход первого регулятора скорости через инвертор, а второго непосредственно соединены с выходом регулятора удлинения, подсоединенного вторым входом к выходу бло ка сравнение, первый вход которого соединен с выходом измерителя удлинения полосы, связанного входами с выходами импульсных датчиков скорости, вторые входы блока сравнения и первого блока умножения подсоединены к выходу задатчика удлинения, введены формирователь импульсов разностной частоты, суммирующий интегратор, блок формирования, суммирующий усилитель, блок деления, второй, третий, четвертый, пятый блоки умножения, задатчик опорного напряжения, задатчики толщины, ширины полосы, задатчик диаметра правильных роликов соединенный с входом Делитель блок деления, вход Делимое которого подсоединен к задатчику толщины, а выход - к первому входу суммирующего усилителя, второй вход которого соединен с задатчиком опорного напряжения, выход суммирующего усилителя подсоединен к первому входу второго блока умножения, второй вход которого соединен с выходом первого измерителя скорости вращения двигателя, а выход - с первым входом третьего блока умножения, второй вход которого соединен с выходом суммирующего интегратора и через блок формирования - с первым входом четвертого блока умножения, второй вход последнего соединен с выходом пятого блока умножения, первый вход которого подсоединен к задатчику ширины полрсы, второй вход - к задатчику толщины, первый вход суммирующего интегратора подсоединен к выход формирователя импульсов разностной частоты, входами соединенного с импульсными датчиками скорости, второй вход - к выходу блока коррекции, третий вход к выходу третьего блока умножения соединен с третьими входам контуров регулирования тока якоря i приводных двигателей тянущих роликов.
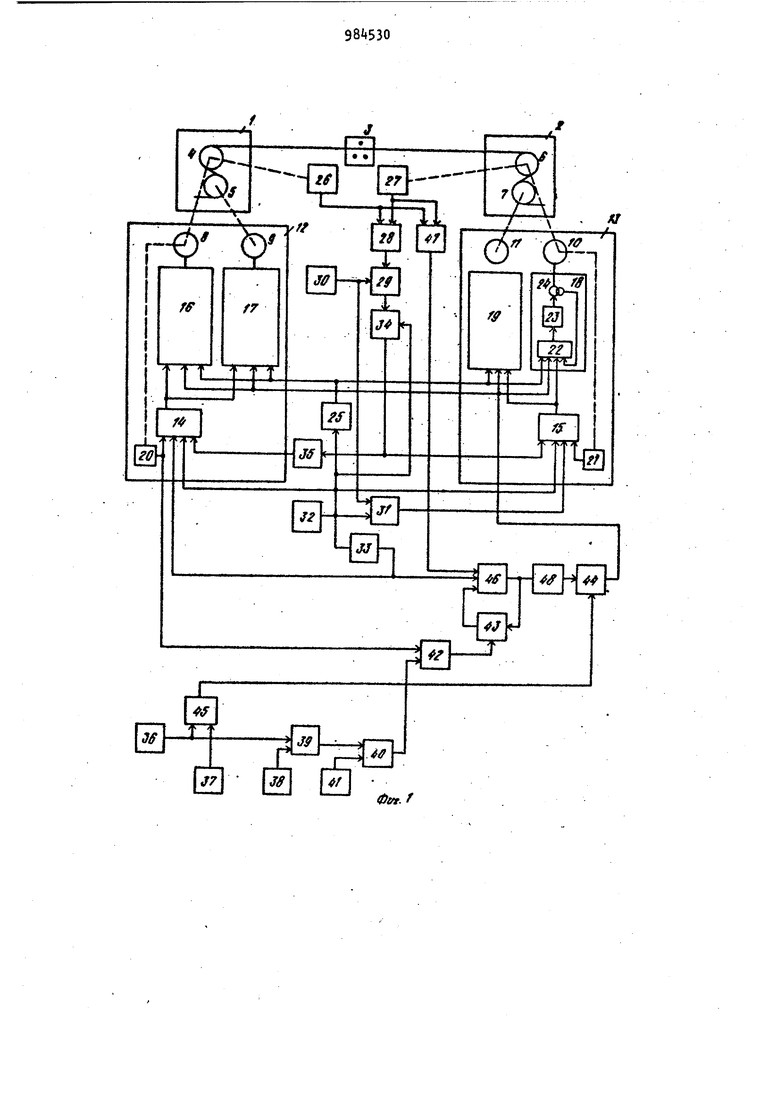
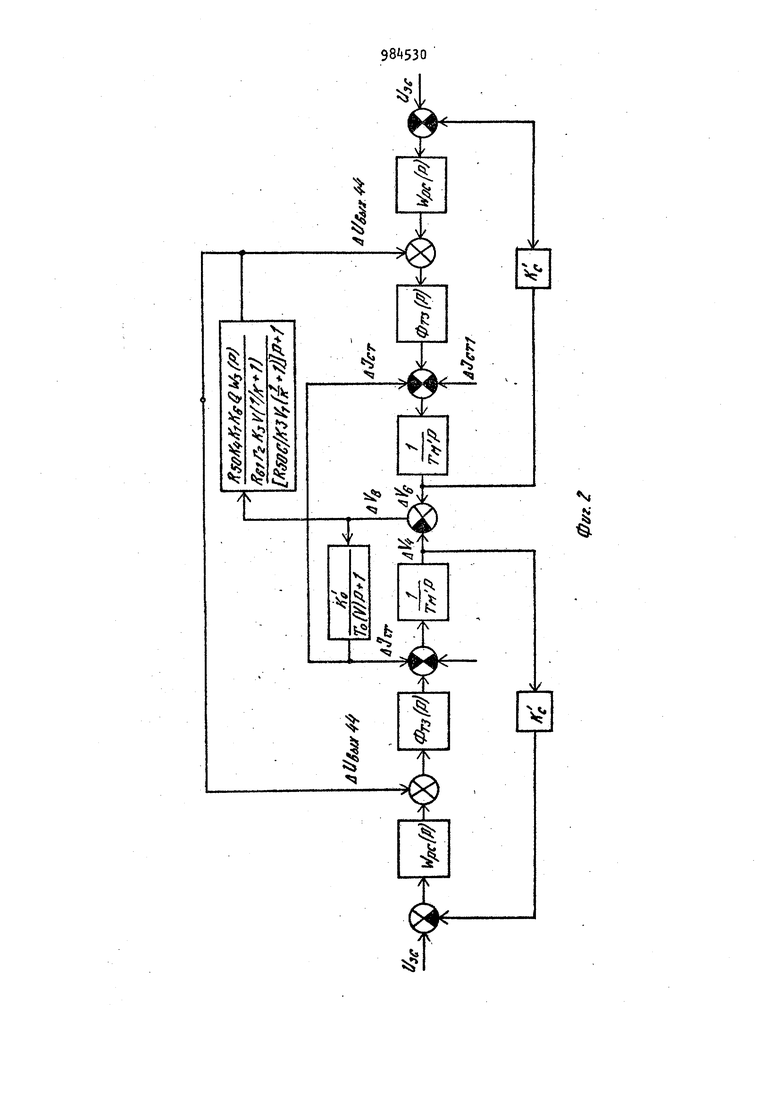
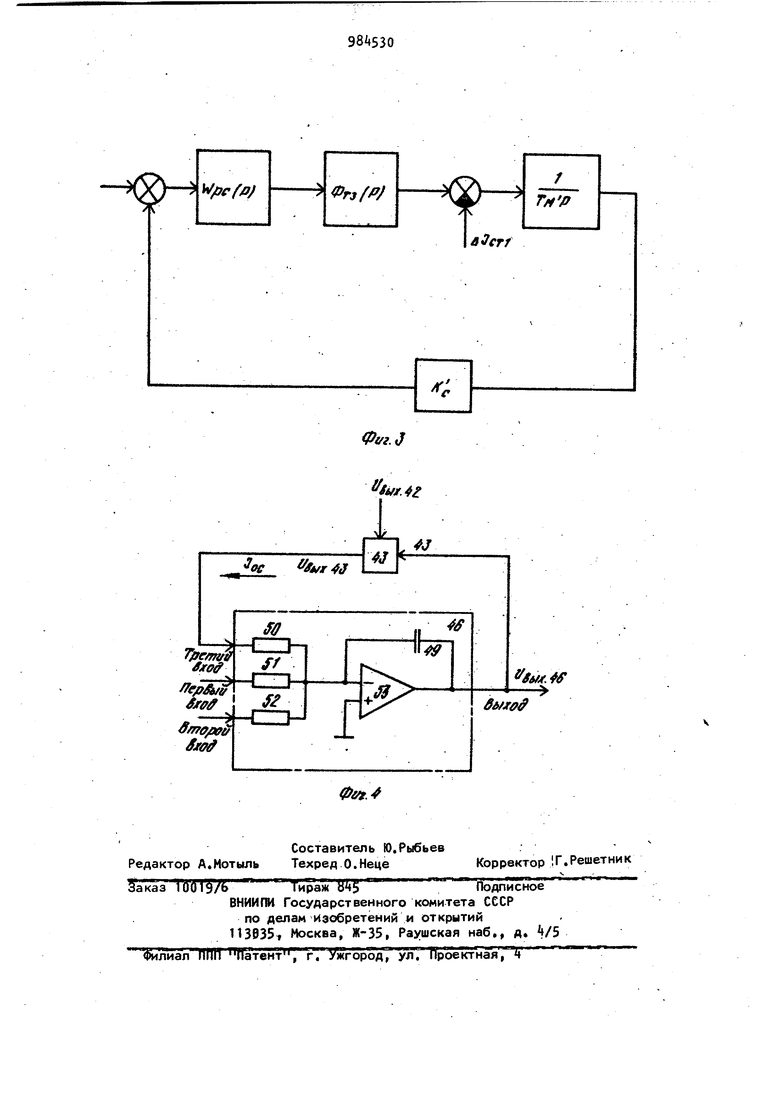
На фиг. 1 приведена блок-схема устройства во взаимосвязи с автоматизируемым участком изгибно-растяжного агрегата для варианта, когда агрегат содержит четыре тянущих ролика на фиг. 2 - структурная схема устройства; на фиг, 3 структурная схема после образования,- на фиг. схема суммирующег(9 интегратора.
Агрегат содержит натяжные станции 1 и 2, расположенные соответственно до и после изгибателя 3. В каждую станцию 1 и 2 входит по два тянущих ролика , 5 и 6, ), кажг дый из которых имеет индивидуальный привод от соответствующего двигателя 8-11 постоянного тока.
Скорость вращения роликов натяжных станций 1 и 2 поддерживается системами 12 и .13 автоматического регулирования скоростей, которые построены по принципу подчиненного регулирования и содержат регуляторы 1 и 15 скорости, контуры 16-19 регулирования тока якоря двигателей и измерители 20 и 21 скорости вращения двигателей 8 и 10,
Первые входы регуляторов 1 + и 15 скорости соединены с выходами измерителей 20 и 21 скорости вращения двигателей соответственно. Измерители 20 и 21 скорости вращения двигателей имеют механическую связь с валами двигателей 8 и 10. Каждый контур 16-19 регулирования тока якоря приводных двигателей тянущих роликов содержит последовательно соединенные регулятор 22 тока и тиристорный преобразователь 23, в цепи обратной связи включен датчик тока двигателя.
Первый, второй, третий входы регулятора 22 тока являются соответственно первым, вторым, третьим .входами контура регулирования тока якоря приводных двигателей тянущих роликов, первые входы контуров г 16 и 17 регулирования тбка якоря подключены к выходу регулятора 14 скорости, первые входы .контуров 18 и 19 тока якоря - к выходу регулятора 15 скорости, а вторые, соединенные между собой, входы контуров 16-19 тока якоря - к выходу блока 25 дифференцирования.
Устройство содержит также импульсные датчики 26 и 27 скорости, .механически связанные с тянущими роликами 4 и 6 соответственно, выходами подключенные к соответствующим входам измерителя 28 удлинения полосы, выход которого соединен с первым входом блока 29 сравнения, второй вход последнего подключен к выходу задатчика 30 удлинения и второму входу блока 31 умножения, первый вход которого подключен к выходу задатчика 32 скорости, соединенного также с входами блока 2|5 дифференцирования, с вторыми входами регуляторов 1 . и 15 скорости, блока 33 коррекции и первым входом регулятог ра удлинения полосы, второй вход которого соединен с выходом блока 29 сравнения, а выход через инвертор 35 и непосредственно - с четвертыми входамирегуляторов Т и 15 скорости соответственно, третьи входы регуляторов 14 и 15 скорости соединены с выходами блока 33 коррекции и блока 31 умножения соответственно.
В устройстве имеются задатчики 36-38 толщины, ширины и диаметра правильных роликов, блок 39 деления,
суммирующий усилитель 40, задатчик 41 опорного напряжения,, блоки 42-45 умножения, суммирующий интегратор 46, формирователь 47 импульсов разностной частоты, блок 48 форсирования. К входу Делимое блока 39 деления подключен вь1ход задатчика 36 толщины и второй вход блока 45 умножения, вход Делитель - к выходу задатчика 38 диаметра правильных роликов, а выход - к первому входу суммирующего усилителя 40, второй вход которого соединен с выходом задатчика 41 опорного напряжения, а выход - с первым входом блока 42
умножения, второй вход которого подключен к третьему входу регулятора 14 скорости и к выходу измерителя 20 скорости вращения двигателя, выход блока 42 умножения подключен к
первому входу блока 43 умножения, выход которого соединен с третьим ..входом суммирующего интегратора 46, первый и второй входы которого подключены соответственно к выходам
формирователя 47 импульсов разностной частоты и блока 33 коррекции, а выход - к второму входу блока 43 умножения и через блок 48 формирования - к первому входу блока 44 умножения, второй вход которого соединен с выходом блока 45 умножения, первый вход последнего - с выходом задатчика 37 ширины, выход блока 44 умножения подключен к третьим входам замкнутых контуров 16-19. Регуляторы 14 и 15 скорости и регулятор 22 тока представляют собой последовательно соединенный узел сравнения и ПИ-регулятор.
Устройство работает следующим образом.
Поддержание требуемой величины пластической деформации осуществляется за счет создания разности скоростей вращения тянущих роликов Ц и 6. Поддержание заданной скорости ролика (6) осуществляется с помощью системы 12 (13) регулирования скорости. Для перераспределения нагрузки между роликами k S (6 и 7) входящими в натяжную станцию 1 (2) , выходной сигнал регулятора .скорости подается одновременно на вход двух контуров 16, 17. (18, 19) регулирования тока якоря двигателей. Для компенсаций инерционных масс двигателей 8-11 и роликов -7 в периоды разгона и торможения на вход контура 16-19 регулирования тока подается сигнал с выхода блока 25 иффёренцирования, пропорциональный ускорению движения полосы. Сигналы задания опорной скорости и разности скоростей роликов « и 6, подаваемые на вход регулятора 14 и 15 скорости, формируются соответственно на выходе задатцика 32 скоро-, сти и блока 31 умножения В устройстве предусмотрена коррек ция сигнала задания разности скоростей тянущих роликов k и 6 с учетом отношения их диаметров. Сигнал коррекции формируется на выходе блока 33 коррекции и подается на вход регулятора 1 скорости. Повышенная точность поддержания заданной разности.скоростей роликов k и 6 обеспечивается сканирующим узлом, который осуществляет контроль за удлинением полосы и выдает сигнал на вход регуляторов 14 и 15, корректирующий сигнал задания разностей скоростей тянущих роликов 4 и 6. Импульсные датчики 2б и 27 скорости , измеритель 28 удлинения, блок 29 сравнения, задатчик 30 удлинения и регулятор 34 удлинения выполняют функцию сканирующего узла. Выходные сигналы с лмпульсных дат чиков 26 и 27 поступают на вход измерителя 28 удлинения. В измеритель 28 удлинения входит также узел, осуществляющий коррекцию результата измерения по отношению диаметров роликов 4 и 6. На выходе измерителя 28 удлинения формируется сигнал, про порциональный относительной разности линейных скоростей (удлинения) ролика 4 и 6, Измеренное значение удлинения с выхода измерителя 28 удлине0 0 . ния поступает на блок29 сравнения, где сравнивается с заданным значением удлинения, поступающим с выхода задатчика 30 удлинения. Сигнал рассогласования между заданным и измеренным удлинением с выхода блока 29 сравнения через регулятор 34 удлинения поступает на вход регулятора 15 скорости и в противофазе (через инвертор 35) - на вход регулятора 14 скорости Так как время измерения измерителя 28 удлинения зависит от скорости перемещения полосы, время изодрома регулятора 34 удлинения регулируется выходным сигналом задатчика 32 скорости. Выходной сигнал регулятора 34 удлинения корректирует сигнал задания разности скоростей роликов 4 и 6, который формируется на выходе блока 31 умножения. На первый вход блока 31 умножения с выхода задатчика 30 удлинения подается сигнал, пропорциональный относительной разности линеййых скоростей роликов 4 и 6, а на второй вход подается сигнал задания опорной скорости с выхода задатчика 32 скорости. Сигналы с выхода задатчика Зб толщины полосы и задатчика 33 диаметра правильных роликов поступают на соответствующие входы блока 39 деления, на выходе которого формиpyetcя сигнал, равный выхзб ВЫХ 39 Ufl вЫХЗб 1 выходной сигнал блока 39 где Ц деления} выходной сигнал задатчика 36 ТОЛЩИНЫ} выходной сигнал задатчика 38 диаметра правильных РОЛИКОВ} толщина ПОЛОСЫ) диаметр правильных роликов;Кп- постоянные коэффициенты. 1. 2 На выходе суммирующего усилителя 40 формируется сигнал, равный вbW40 вЬКЗЗ БЫХ41 к7а вЫХ41 где Ugyx) выходной сигнал суммирующего усилителя 40J tUjjjj - выходной .сигнал задаУчика 41 опорного напряжения. 11 Известно, что коэффициент {К) уп ругой зоны при изгибе определяется погрешностью, не превышающей %, из выражения -,(5) ZEb где бу - предел текучести материала полосы. К, 2Е Если принятьК -- 6ЫУ4Г°25. ТО с учетом формуль (З) выражение (2) примет вид . С4) Сигналы с выхода суммирующего ус лителя 40 с выхода измерителя 20 скорости подаются на соответствующи входы блока 2 умножения, на выходе которого формируется сигнал, равный 8ЫХ 42- ВЫХ НО ВЫХ40 (r V где U0,;42: выходной сигнал блока Ц умножения; (Jg(,ix20 a выходной сигнал измерит ля 20 скорости V -скорость движения полос -постоянный коэффициент. Для определения передаточной фун ции W(p) суммирующего интегратора 46 по первому и второму входам пред ставим его (фиг, 4) в виде операционного усилителя 53, в цепи обратной связи которого включены блок 43 умножения и резистор. 50. Передаточная функция суммирующего интегратора 46 определяется из выражения -, W{P) полное сопротивление цепи об-ратной связи, полное сопротивление входной цепи} Rg - эквивалентное сопротивление цепи обратной СВЯЗИ} С --емкость конденсатора Л9. Эквивалентное сопротивление R цепи обратной связи определяется по формулеВЫХ46 ВЫХ4Ь 50 6ЫХ 43 0 где Ugjj, выходной сигнал суммирующего интегратора А6; -вых43- выходной сигнал блока ВЫХ42%Х46 умножения. Т .WfS ток в цепи обратной свя Щози } so сопротивление резистора 50. После подстановки значения Ugj,, из формулы (5) в выражение (7) получаем R Э ч Г ГГ77ГТТТ v° ( Передаточная функция суммирующего интегратора 46 по первому входу имеет вид R,,KV,H/K.i, ., K3V-,(1|K-H) R, coпpotивлeниe входного резистора 5t. Передаточная функция суммирующего интегратора Ц6 по второму входу имеет вид K VMi/K+i; w,i(p; K3v,,( где R52 сопротивление резистора 52. Импульсы частот f,j и f с выходов импульсных датчиков 26 и 27 скорости поступают на входы формирователя 7 импульсов разностной ча стоты. Среднее знамение сигнала 4Т чэ выходе формирователя 7 пропорционально разности частот f ВЬ« 47 («,), где uj - угловая частота вращения тянущего ролика ki U( - угловая частота вращения тянущего ролика 6, К4 постоянный коэффициент. На выходе блока 33 коррекции по тношению диаметров тянущих роликов и 6 формируется сигнал и, зз Р ewxas -K v -r- j, (12) где rjf - радиус тянущего ролика k, г„ - радиус тянущего ролика 6; Kj постоянный коэффициент. Так как интегратор 6 является инерционным-звеном {формула 9) с до статочно большой постояннрй времени . (показано ниже), то при подаче на его первый вход импульсов разностной частоты с выхода формирователя 7 на выходе интегратора 6 имеется достаточно низкий уровень пульсаций, В итоге выходной сигнал 11,, интегратора tS равен 4ь ивьгх41 1 (Р «вых (Р / После подстановки а формулу (13) вы ражений (9 10, 11, 12) получим SO K V l1/K+l| ВЫХ 4Ь ); К;;К- 4) . (-г/км; KgV (1/Kt) ( 2 )R -F;| KyV,/ r A - rrr/J где - линейная скорость на окружности тянущего ролика $ - линейная скорость на окружности тянущего р лика 6j С учетом того, что и при выражеусловии равенстваRsi aние (14) примет вид 50 Л вЫХ4Ь R . () - 1 .1 ( KjV (() (15) На входы блока 45 умножения пода ются сигналы с выхода задатчика 6 толщины и задатчика 37 ширинь) полосы. Выходной сигнал Ug, ния определяется выражением 8ЫХ 45 бЫХ 96 вЫХ 37 К, К b ,(ffc 014 где b - ширина полосы; Q - сечение полосы} Kg - постоянный коэффициент . Сигнал с выхода суммирующего интегратора k6 через блок 8 форсирования подается на первый вход блока k умножения, на второй вход которого подается сигнал с выхода блока S. При этом сигнал на выходе блока k умножения &ЫХ44 ВЫХ46- з(Р) ) (Ve,-V4). ( KjV(1/K4-lj где W5(p) KpCj; FH) передаточная функция блокаКр коэффициент усиления;7 - время упреждения. Выходной сигнал блока 4 подается на входы замкнутых контуров 1619 регулирования тока, где суммируется с сигналом задания, поступающим с.выхода регуляторов 14 и 15 скорости. Таким образом, согласно приведенного анализа, структурная схема системы регулирования скорости вращения роликов 4 и 6 примет вид (фиг, 2), Очевидно, что при выполнении равенстваfO 6 ); w,( (т.е. время упреждения Т блока 48 формирования равно эквивалентной инерционной постоянной времени замкнутого контура 16-18 регулирования тока), влияние обратной связи по натяжению дТст полностью компенсируется введением дополнительного задания Ливых44иэ вход замкнутого контура регулирования тока. После образования структурная схема системы регулирования скорости (фиг, 2) примет вид (см;, фиг, 3).
В системе регулирования скорости (фиг. 3) возможно применение стандартных методов настройки, что по-зволит добиться оптимального быстродействия.5
Таким образом, предлагаемое устройство позволяет повысить быстродействие и обеспечивает возможность применения стандартных методов настройки его,а также повысить качество Поверхности полосы перед травлением.
Экономическая эффективность от использования предлагаемого устройства составит 82 тыс. руб. в год за счет повышения качества металла. 5 Формула изобретения
Устройство управления изгибнорастяжным агрегатом, включающее две группы тянущих роликов с индивидуальным приводом ОТ двигателей посте- 20 янного тока, первая группа которых расположена до изгибателя и непосредственно перед ним содержит первый тянущий ролик, вторая группа расположена после изгибателя и непосред- 25 ственно после него содержит второй тянущий ролик, содержащее первый и второй импульсные датчики и первые и вторые измерители скорости вращения двигателей, механически связан- 30 ные с первым и вторым тянущими роликами соответственно, пеовые входы контуров регулирования /ока якоря приводных двигателей пе.рвой и второй групп тянущих роликов соединены с 35 выходами первого и второго регуляторов скорости соответственно, вторые входы, соединенные между собой, с выходом блока дифференцирования, первые входы первого и второго регуляторов скорости подсоединены к выходам соответствующих измерителей скорости вращения двигателей, вторые входы к выходу задатмика скорости, соединенного с входом блока, коррекции, с , первыми входами первого блока умножения и регулятора удлинения, выходы блока коррекции и первого блока умножения соединены соответственно с третьими входами первого и второго регуляторов скорости, четвертый вход первого регулятора скорости 4ерез инвертор, а второго непосредственно соединены с выходом регулятора удлинения, подсоединенного вторым входом „ к выходу блока сравнения, первый вход .которого соединен с выходом измерителя удлинения полосы, cвязaннor. ixoдами с выходами импульсных датчикой
скорости, вторые входы блока сравнения и первого умноже1ния подсоедйг нены к выходу задатчика удлинения, отличающееся тем, что,с целью повышения быстродействия при сохранении томности, в него дополнительно введены формирователь импульсов разностной частоты, суммирующий интегратор, блок форсирования, суммирующий усилитель, блок деления, второй, третий, четвертый, пятый блоки умножения, задатчик опорного напряжения, задатчики толщины, ширины полосы, задатчик диаметра правильных роликов, сое.диненный с входом Делитель блока деления, вход Делимое второго подсоединен к задатчику толщины, а выход - к первому входу суммирующего усилителя, второй вход которого соединен с задатчиком опорного напряжения, выход суммирующего усилителя подсоединен к первому входу второго блока умножения, второй вход которого соединен с выходом первого измерителя скорости вращения двигателя, а выход - с первым входом третьего блока умножения, втрррй вход которого соединен с выходом суммирующего интегратора и через блок формирователя - с первым входом четверто1-о блока умножения, второй вход последнего соединен с выходом пятого блока умножения, первый вход которого подсоединен к задатчику ширины полосы, второй вход - к задатчику толщины, первый вход суммирую.щего интегратора подсоединен к формирователя импульсов разностной частоты, входами соединенного с импульсными датчиками скорости, второй вход - к выходу блока коррекции, третий вход - к выходу третьего блока умножения, выход четвертого блока умножения соединен с третьими входами контуров регулирования тока якоря приводных двигателей тянущих роликов.
Источники информации, принятые во внимание при экспертизе
1,Файнштейн В,М. Совершенствование средств правки листового проката за рубежом. Обзорная информация, ин-т Черметинформация, сер. 7 вып. 1, 1977, с. 18, 17, рис. За,6.
2,Герхард Гляйснер, Экард Вильке. Хайо Аниол, Издание акционерного общества Сименс Электрообррудование для линий обработки,
№ 128120, с. 12-1if,
2)-
T/tff Т
U«7rr/
Фуг.д
Sw.l
i
