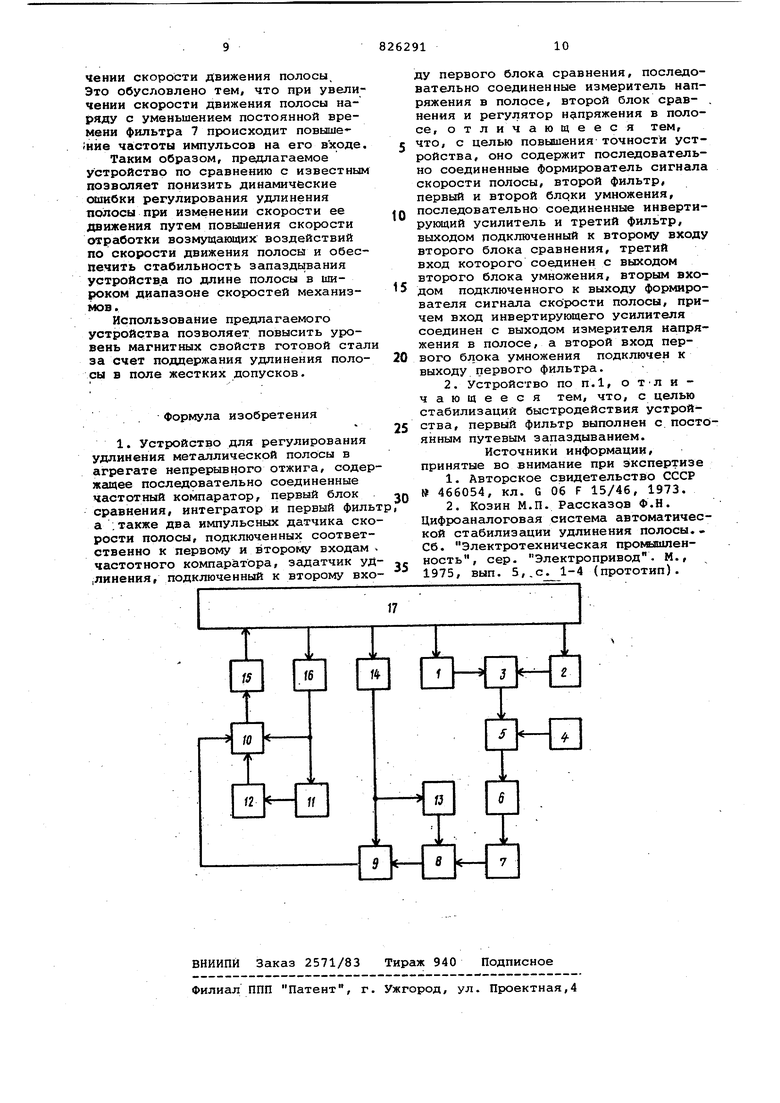
форму цифроаналоговым преобразователем и подается в .систему управления электропривода тянущих роликов, которая обеспечивает необходимое для заданной вытяжки натяжение полосы fl . Недостатком данного устройства является низкая точность отработки возмущаюгдих воздействий по скорости движения полосы,-так как отработка возмущений идет по контуру вытяжки, в который входит измеритель вытяжки, с большим запаздыванием, обусловленным наличием блока сглаживания Наиболее близким по технической сущности к предлагаемому является устройство автоматической стабилизации удлинения полосы, построенное по принципу подчиненного регулирования и содержащее внешний контур стабилизации удлинения и подчиненный ему ко тур регулирования напряжения в полос Внешний контур стабилизации удлинени включает в себя два импульсных датчи ка скорости, сигналы с выхода которых подаются на вход измерителя разност;. двух частот (частотного ком паратора) , выделяющего сигнал, пропорциональный абсолютному удлинению полосы. Для сравнения измеренного и заданного удлинения в относительных величинах на выходе блока задания (управляемого делителя частоты) формируется частотный сигнал задания удлинения, пропорциональный скорости движения полосы. Формирование сигнала рассогласования между заданным и измеренным удлинением производится блоком сравнения (фазовым дискриминатором) . Фазовый дискриминатор одновременно осуществляет интегрирование сигнала рассогласования. Сигнал с выхода интегратора через фильт предназначенный для сглаживаний пуль саций, подается на первый вход блока сравнения подчиненного контура регулирования напряжения в полосе. На второй, вход блока сравнения подается сигнал обратной связи с измерителя напряжения в полосе. Выход блока сравнения подчиненного контура соеди нен со входом регулятора напряжения в полосе. Контур регулирова-ния напря жений обеспечивает необходимое, для заданного удлинения, натяжение полосы 2. Недостатком данного устройства является низкая скорость отработки возмущающих воздействий по скорости движения полосы, что приводит к существенным динамическим ошибкам регулирования удлинения полосы при изменении скорости ее движения. Это обусловлено тем/ что отработка возмущающих воздействий идет по внешнему контуру стабилизации удлинения полосы, обладающему низким быстродействием из-за наличия фильтра, . предназначенного для сглаживания пульсаций. Кроме того, запаздывание данного устройства увеличивается при возрастании скорости движения полосы. Цель изобретения - повышение точности устройства за счет повышения скорости отработки возмущающих воздействий по скорости движения полосы, а также стабилизация быстродействия устройства. Поставленная цель достигается тем, что в устройство, содержащее последовательно соединенные частотный компаратор, первый блок сравнения, интегратор и первый фильтр, а также для импульсных датчика скорости полосы, подключенных соответственно к первому и второму входам частотного компаратора, задатчик удлинения, подключенный к второму входу первого блока сравнения, последовательно соединенные измеритель напряжения в полосе, второй блок сравнения и регулятор напряжения в полосе, введены последовательно соединенные формирователь сигнала скорости полосы, второй фильтр, первый и второй блоки умножения, последовательно соединенные инвертирующий усилитель и третий фильтр, выходом подключенный к второму входу второго блока сравнения, третий вход которого соединен с выходом второго блока умножения, вторым входом подключенного к выходу формирователя сигнала скорости полосы, причем вход инвертирующего усилителя соединен с выходом измерителя напряжения в полосе, а второй вход первого блока умножения подключен к выходу первого фильтра. Кроме того, первый фильтр выполнен с постоянным путёвым запаздыванием. Устройство построено по принципу подчиненного регулирования и включает в себя внешний контур стабилизации удлинения полосы и подчиненный ему контур регулирования напряжения в полосе. На чертеже показана структурная схема устройства. I Устройство содержит два импульсных датчика 1 и 2 скорости полосы, частотный компаратор 3, задатчик 4 удлинения, первый блок 5 сравнения, интегратор б, первый фильтр 7, первый блок 8 умножения и второй блок 9 умножения, второй блок 10 сравнения, инвертирующий усилитель 11, второй 12 и третий 13 фильтры, формирователь 14 сигнала скорости полосы, регулятор 15 напряжения в полосе, измеритель 16 напряжения в полосе и агрегат 17 непрерывного отжига. Первый и второй блоки 8 и 9 умножения могут быть реализованы no любой известной схеме аналоговых множителей. Второй и третий фильтры 12 и 13 представляет собой инверционные звенья первого и второго порядка, причем их эквивалентная постоянная времени равна или больше, чем эквивёшентная постоянная времени первого фильтра 7. Коэффициент передачи фильтров в статике равен единице. Формирователь 14 может быть реалиэо ван по любой известной схеме измере НИН скорости движения полосы. Так, например, в качестве Формирователя 14 может быть использован тахогенер тор. Если же на вход формирователи 14 поступает частотный сигнал скорости, то он может быть выполнен как преобразователь частота-напря;жение и т.д. Устройство работает следующим образом., Сигналы с выхода импульсных -датчиков 1 и 2 подаются на вход частот ного компаратора 3, выходной сигнал которого сравнивается первым блоком 5 сравнения с сигналом задатчика 4 удлинения. Сигнал рассогласования подается на вход интегратора 6, обеспечивающего астатизм устройства относительно удлинения поло сы. Выходной сигнал интегратора б подается через последовательно соединенные первый .фильтр 7, первый и второй блоки 8 и 3 умножения на вход второго блока 10 сравнения. Блоки 8 и 9 умножения выполняют функцию звеньев с управляемым от формирователя 14 коэффициентом пере дачи. Коэффициент передачи К второго блока 9 умножения равен ВЫХ8 Дв Н) и „„т выходной сигн Din К О /второго блока умножения; выходной сигн первого блока В умножения; выходной сигн I формирователя 14 сигнала скорости поло сы; к - коэффициент п редачи формир вателя 14. В статике, при неизменной скорос движения полосы, коэффициент переда чи Kg первого блока 8 умножения по аналогии с коэффициентом передачи К определяется выражением Однако при изменении скорости движе ния полосы изменения коэффициента передачи Kg в соответствии с выражением (5) происходит с запаздыванием, обусловленным наличием третьего фильтра 13. Сигнал с выхода блока 9 умножения является сигналом задания напряжения в полосе и подается на третий вход второго блока 10 сравнения, на первый вход которюго подается сигнал обратной связи с выхода измерителя 16 напряжения в полосе, а на второй вход сигнал с выхода измерителя 16 напряжения в полосе через последовательно соединенные инвертирующий усилитель 11 и второй фильтр 12. Выходной сигнал второго блока 10 с сравнения поступает на вход регулятора 15 напряжения в полосе. Регулятор 15 имеет интегральную составляющую, поэтому в статическом режиме, при неизменной скорости движения полосы связь между сигналами на входе блока 10 сравнения определяется выражением выхо вык ьых ° li . 16 где Ug, - выходной сигнал измери теля 16 напряжения в полосе;UBLJV - выходной сигнал второго ® фильтра 12; К.. - коэффициент передачи инвертирующего усилителя 11; При вы г; (7) . - вы.) После подстановки выражений (7)и (8) в формулу (6)получаем UBbhto +6-K,,-G-- 0. (9) На основании (4) и (9) получаем выражение для выходного сигнала первого блока 8 умножения g(l-K4 ) К V в динамике обработка врзмущакицих воздействий по скорости движения полосы происходит следующим образом. При изменении скорости движения полосы происходит изменение коэффициента передачи К блока 9 умножения. Величина dK изменения коэффициента передачи блока 9 умножения, исходя из выр 1жения (4), связана с приращением dv скорости движения полосы зависимостью dK, . (11) Причем за счет наличия фильтра 12 в первый момент не меняется коэффициент передачи блока В умножения и выходной сигнал этого блока сохраняется прежним. Изменения коэффициента передачи К вызовет й зменение выходного сигнала блока 9 умножения на величину « Чвычэ К. Us(, UBb,tg(12
Изменение выходного сигнала блока 9 умножения, являющегося сигналом задания для подчиненного контура регулирования напряжения в полосе, вызывает появление сигнала рассогласования на выходе блока 10 сравнения. Контур регулирования напряжения в полосе за время, определяемое своим быстродействием, отработает изменение сигнала задания.
С учетом того, что сигнал на выходе фильтра 12 меняется с большим запаздыванием при изменении напряжения в полосе, изменение напрях ений в полосе равно изменению сигнала задания, т.е.
d(r dUBb,49 . (13) На основании (10), (12) и (13) получим
dc- ) в V . (14) При этом изменени-е напряжения в пол се, обусловленное изменением скорости движения полосы, вызывает изменение удлинения полосы в соответствии с формулой (2), равное
WQ
Г кв(О, ,((15) -Je
. V о
Подставив dG из выражения (14), полdxjdV.
gngCi-K,) {i к©(ч1,. IJ., .16
L о
Изменение удлинения полосы обусловленное изменением скорости ее движения с учетом (3) и (16) оп ределяется выражением
,.d(
)
,.
(1)
(1- -) ,то df,, 0.
Если К (. .- -I , хи м с 2
Отработка устройством управляющего воздействия происходит следующим образом.
Регулятор внешнего контура стабилизации удлинения полосы является интегрирующим и имеет передаточную функцию
WP (р) ftp .
. К, V
где / Jii- коэффици 6 ент усиления регулятора;
Т-- постоянная интегрирования интератора б..
Известно, что при стандартной настройке контура регулирования на оптимум по модулю интегрирующий регулятор должен иметь передаточную функцию вида
Э
(18)
W
(Р)
где р коэффициент уси- ,
ления регулятора;
te. f
- коэффициент передачи объекта регулирования (в данном случае его произведение коэффициентов К компаратора 3 и коэффициента К печи агрегата); К - коэффициент пере дачи замкнутого подчиненного контура регулирования напряжения в полосе; Т - сумма некомпенсируемых постоянных времени инерционных звеньев, входящих в оптимизируемый контур (в устройстве это постоянная времени первого фильтра) .
Эквивалентной постоянной времени
контура подчиненного регулирования 0 напряжения в полосе можно пренебречь
в силу ее относительной малости.
Так как фильтр 7 имеет постоянное.
путевое запаздывание, то
(19)
V где 1
- величина путевого запаздывания фильтра 7 по длине полосы.
После подстановки Т, из выражен (19) и K(j- из выражения (2) в выражение (18) -получим 2
р 91 к .f к 20 2t- к
Для обеспечения настройки на модульный оптимум внешнего контура устройства необходимо выполнить условие2.
1 .K-f4
т.е. 21KK-f. Kf, Тб
При этом при ступенчатом управлющем воздействии выходная величина удлинения полосы достигает установившегося значения через время
4,7-i
4,7
, что соответствует
постоянному путевому запаздыванию.
Следовательно, предлагаемое устройство имеет постоянное запаздывание по длине полосы во всем диапазоне скоростей механизмов.
При этом применение фильтра 7 с постоянным путевым запаздыванием не приводит к увеличению амплитуды пульсаций на его выходе при увеличении скорости движения полосы. Это обусловлено тем, что при увеличении скорости движения полосы наряду с уменьшением постоянной времени фильтра 7 происходит повыше ;ние частоты импульсов на его входе Таким образом, предлагаемое устройство по сравнению с известным позволяет понизить динамические (яиибки регулирования удлинения полосы при изменении скорости ее движения путем повышения скорости отработки возмущающих воздействий по скорости движения полосы и обеспечить стабильность запаздывания устройства по длине полосы в широком диапазоне скоростей механизмов. Использование предлагаемого устройства позволяет повысить уровень магнитных свойств готовой стал за счет поддержания удлинения полосы в поле жестких допусков. Формула изобретения 1. Устройство для регулирования удлинения металлической полосы в агрегате непрерывного отжига, соде жащее последовательно соединенные частотный компаратор, первый блок сравнения, интегратор и первый фил а .также два импульсных датчика ск рости полосы, подключенных соответ ственно к первому и второму входам частотного компаратора, задатчик уД ,линения, подключенный к второму вх ду первого блока сравнения, последовательно соединенные измеритель напряжения в полосе, второй блок срав- , нения и регулятор напряжения в полосе, отличающееся тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные формирователь сигнала скорости полосы, второй фильтр, первый и второй блоки умножения, последовательно соединенные инвертирующий усилитель и третий фильтр, выходом подключенный к второму входу второго блока сравнения, третий вход которого соединен с выходом второго блока умножения, вторым входом подключенного к выходу формирователя сигнала скорости полосы, причем вход инвертирующего усилителя соединен с выходом измерителя напряжения в полосе, а второй вход первого блока умножения подключен к выходу первого фильтра. 2. Устройство по п.1, о тл и чающееся тем, что, с целью стабилизации быстродействия устройства, первый фильтр выполнен с постоянным путевым запаздыванием. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 466054, кл. G 06 F 15/46, 1973. 2.Козин М.П. Рассказов Ф.Н. Цифроаналоговая система автоматической стабилизации удлинения полосы.. Сб. Электротехническая промьшшенность, сер. Электропривод. М., 1975, вып. 5,,с. 1-4 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU984530A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
| Устройство для контроля и регулирования вытяжки непрерывно движущейся металлической полосы | 1979 |
|
SU908441A1 |
| Устройство для регулирования толщины полосы на непрерывном стане | 1979 |
|
SU772634A1 |
| СИСТЕМА "ТОНКОГО" РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПОЛОСЫ НА НЕПРЕРЫВНОМ СТАНЕ ХОЛОДНОЙ ПРОКАТКИ | 1993 |
|
RU2065790C1 |
| Устройство для регулирования натяжения полосы на непрерывном прокатном стане | 1982 |
|
SU1065051A1 |
| Устройство автоматического регулирования вытяжки прокатанных полос в процессе термической обработки на непрерывных агрегатах | 1983 |
|
SU1139528A1 |
| Устройство для регулирования толщины полосы на прокатном стане | 1991 |
|
SU1794518A1 |
| Устройство для регулирования толщины изоляции кабеля | 1980 |
|
SU941944A1 |
