Н
-у
4 СО О
Ј VI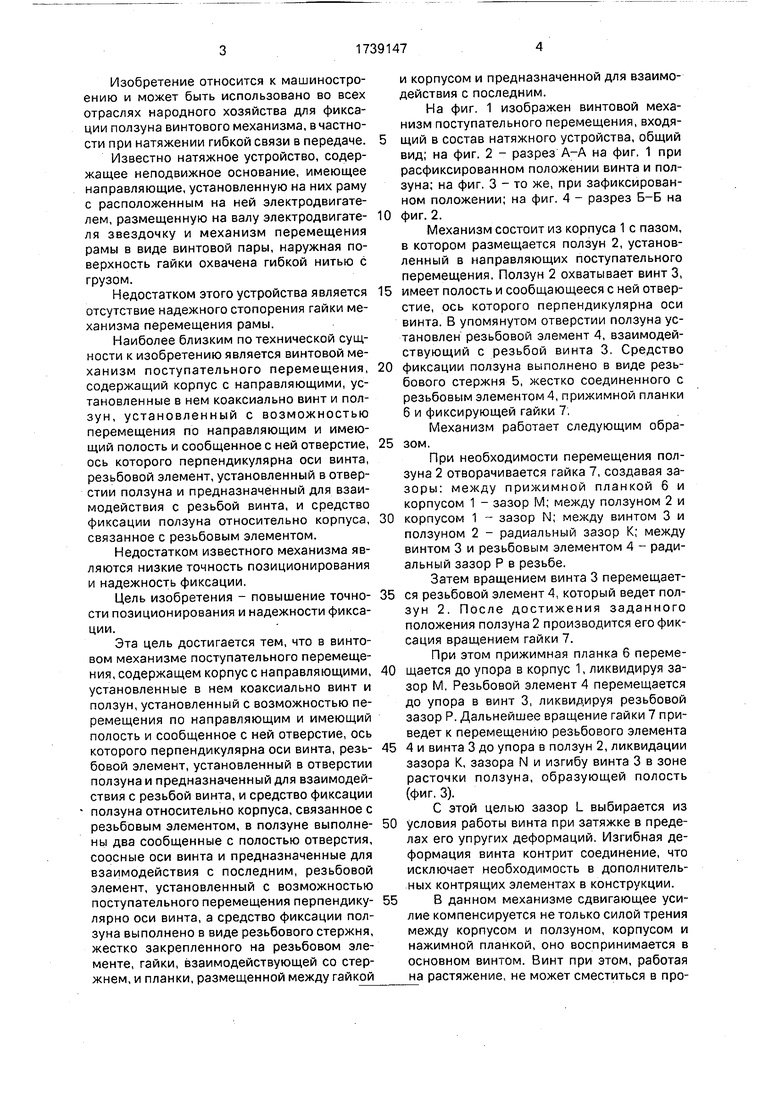
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ И ЗАПИРАНИЯ ДВЕРНЫХ СТВОРОК, РАСПОЛОЖЕННЫХ ОДНА ЗА ДРУГОЙ (ВАРИАНТЫ) | 2005 |
|
RU2289008C1 |
| АППАРАТ ДЛЯ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА | 2000 |
|
RU2177272C1 |
| Устройство для заточки зубьев инструмента | 1981 |
|
SU975347A1 |
| АППАРАТ ДЛЯ НАРУЖНОЙ РЕПОЗИЦИИ И ФИКСАЦИИ ОТЛОМКОВ ДЛИННЫХ ТРУБЧАТЫХ КОСТЕЙ | 2004 |
|
RU2255695C1 |
| АППАРАТ ВНЕШНЕЙ ФИКСАЦИИ | 2007 |
|
RU2352282C1 |
| СТЕРЖНЕВОЙ КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ (СКДА), УЗЕЛ РЕПОЗИЦИИ ДЛЯ СКДА И СРЕДСТВО ДЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ЧРЕСКОСТНЫХ СТЕРЖНЕЙ СКДА | 1998 |
|
RU2140224C1 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ ТРАВМ ВЕРХНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2074679C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕНТОЙ РАПИРЫ ДЛЯ БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА | 1993 |
|
RU2115777C1 |
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| ПЛАНЕТАРНАЯ РОЛИКО-ВИНТОВАЯ ПЕРЕДАЧА | 2001 |
|
RU2194202C2 |
Изобретение относится к машиностроению и может быть использовано в механиз, ±. : Б мах поступательного перемещения с фиксацией перемещаемого звена, например ползуна. Цель изобретения - повышение точности позиционирования и надежности фиксации. С этой целью резьбовой элемент 4 установлен в отверстии ползуна 2 с возможностью поступательного перемещения. При вращении винта 3 резьбовой элемент 4 вместе с ползуном 2 перемещается вдоль оси винта 3. Фиксация ползуна 2 производится вращением гайки 7. При этом происходит последовательная выборка зазоров между винтом 3 и резьбовым элементом 4, винтом 3 и ползуном 2, ползуном 2 и корпусом 1, прижимной планкой 6 и корпусом 1 соответственно. Изгибная деформация винта 3 обеспечивает надежную фиксацию ползуна 2. 4 ил. /4 : /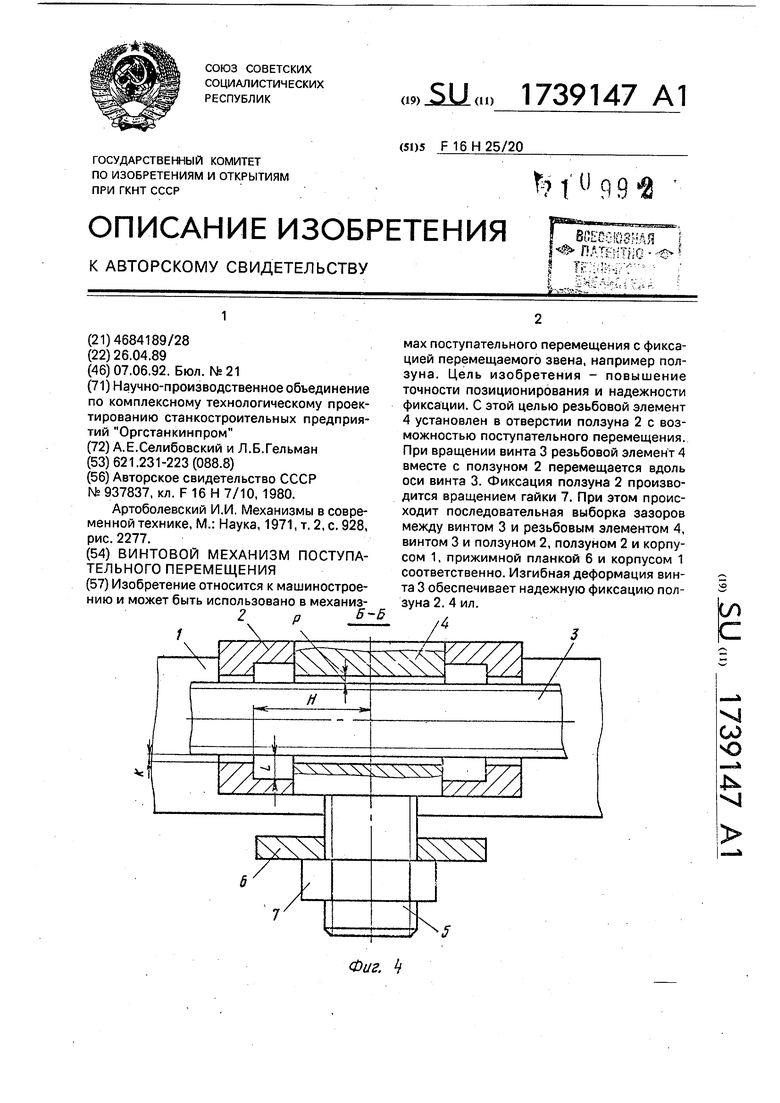
Фиг. h
Изобретение относится к машиностроению и может быть использовано во всех отраслях народного хозяйства для фиксации ползуна винтового механизма, в частности при натяжении гибкой связи в передаче.
Известно натяжное устройство, содержащее неподвижное основание, имеющее направляющие, установленную на них раму с расположенным на ней электродвигателем, размещенную на валу электродвигателя звездочку и механизм перемещения рамы в виде винтовой пары, наружная поверхность гайки охвачена гибкой нитью с грузом.
Недостатком этого устройства является отсутствие надежного стопорения гайки механизма перемещения рамы.
Наиболее близким по технической сущности к изобретению является винтовой механизм поступательного перемещения, содержащий корпус с направляющими, установленные в нем коаксиально винт и ползун, установленный с возможностью перемещения по направляющим и имеющий полость и сообщенное с ней отверстие, ось которого перпендикулярна оси винта, резьбовой элемент, установленный в отверстии ползуна и предназначенный для взаимодействия с резьбой винта, и средство фиксации ползуна относительно корпуса, связанное с резьбовым элементом.
Недостатком известного механизма являются низкие точность позиционирования и надежность фиксации.
Цель изобретения - повышение точности позиционирования и надежности фиксации.
Эта цель достигается тем, что в винтовом механизме поступательного перемещения, содержащем корпус с направляющими, установленные в нем коаксиально винт и ползун, установленный с возможностью перемещения по направляющим и имеющий полость и сообщенное с ней отверстие, ось которого перпендикулярна оси винта, резьбовой элемент, установленный в отверстии ползуна и предназначенный для взаимодействия с резьбой винта, и средство фиксации ползуна относительно корпуса, связанное с резьбовым элементом, в ползуне выполнены два сообщенные с полостью отверстия, соосные оси винта и предназначенные для взаимодействия с последним, резьбовой элемент, установленный с возможностью поступательного перемещения перпендикулярно оси винта, а средство фиксации ползуна выполнено в виде резьбового стержня, жестко закрепленного на резьбовом элементе, гайки, взаимодействующей со стержнем, и планки, размещенной между гайкой
и корпусом и предназначенной для взаимодействия с последним.
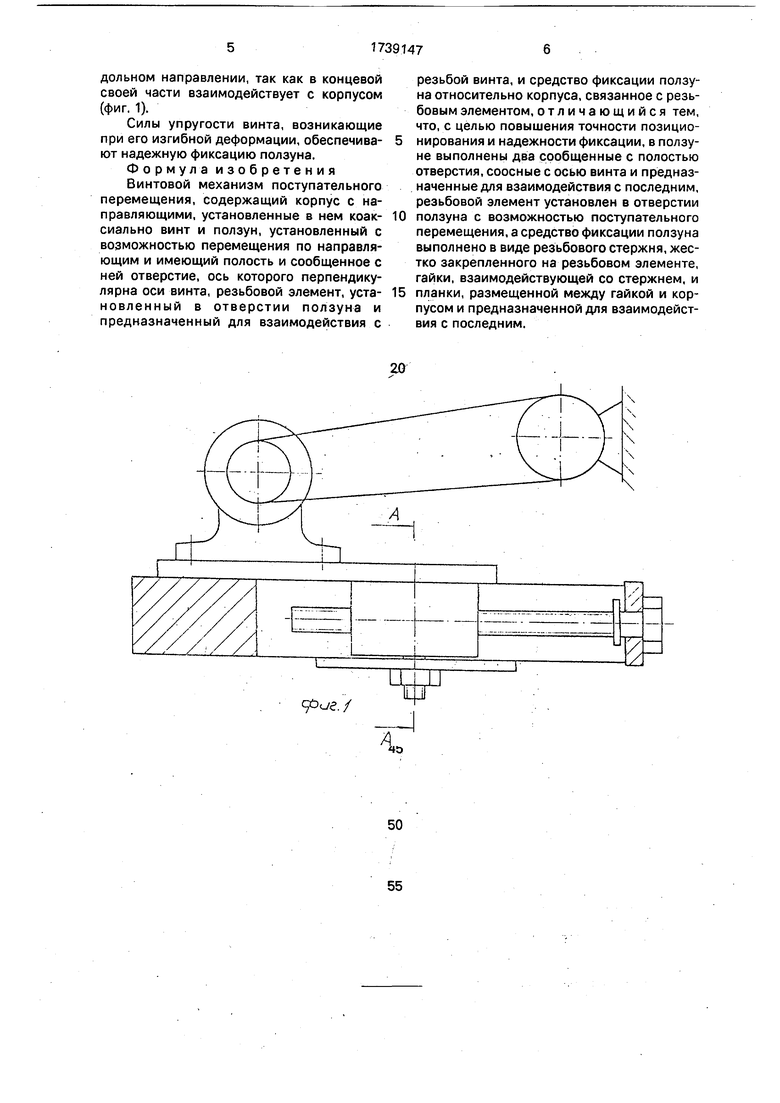
На фиг. 1 изображен винтовой механизм поступательного перемещения, входящий в состав натяжного устройства, общий вид; на фиг. 2 - разрез А-А на фиг. 1 при расфиксированном положении винта и ползуна; на фиг. 3 - то же, при зафиксированном положении; на фиг. 4 - разрез Б-Б на
0 фиг. 2.
Механизм состоит из корпуса 1 с пазом, в котором размещается ползун 2, установленный в направляющих поступательного перемещения. Ползун 2 охватывает винт 3,
5 имеет полость и сообщающееся с ней отверстие, ось которого перпендикулярна оси винта. В упомянутом отверстии ползуна установлен резьбовой элемент 4, взаимодействующий с резьбой винта 3. Средство
0 фиксации ползуна выполнено в виде резьбового стержня 5, жестко соединенного с резьбовым элементом 4, прижимной планки 6 и фиксирующей гайки 7.
Механизм работает следующим обра5 зом.
При необходимости перемещения ползуна 2 отворачивается гайка 7, создавая зазоры: между прижимной планкой 6 и корпусом 1 - зазор М; между ползуном 2 и
0 корпусом 1 - зазор N; между винтом 3 и ползуном 2 - радиальный зазор К; между винтом 3 и резьбовым элементом 4 - радиальный зазор Р в резьбе.
Затем вращением винта 3 перемещает5 ся резьбовой элемент 4, который ведет ползун 2. После достижения заданного положения ползуна 2 производится его фиксация вращением гайки 7.
При этом прижимная планка 6 переме0 щается до упора в корпус 1, ликвидируя зазор М. Резьбовой элемент 4 перемещается до упора в винт 3, ликвидируя резьбовой зазор Р. Дальнейшее вращение гайки 7 приведет к перемещению резьбового элемента
5 4 и винта 3 до упора в ползун 2, ликвидации зазора К, зазора N и изгибу винта 3 в зоне расточки ползуна, образующей полость (фиг. 3).
С этой целью зазор L выбирается из
0 условия работы винта при затяжке в пределах его упругих деформаций. Изгибная деформация винта контрит соединение, что исключает необходимость в дополнительных контрящих элементах в конструкции.
5 В данном механизме сдвигающее усилие компенсируется не только силой трения между корпусом и ползуном, корпусом и нажимной планкой, оно воспринимается в основном винтом. Винт при этом, работая на растяжение, не может сместиться в продольном направлении, так как в концевой своей части взаимодействует с корпусом (фиг. 1).
Силы упругости винта, возникающие при его изгибной деформации, обеспечивают надежную фиксацию ползуна. Формула изобретения Винтовой механизм поступательного перемещения, содержащий корпус с направляющими, установленные в нем коак- сиально винт и ползун, установленный с возможностью перемещения по направляющим и имеющий полость и сообщенное с ней отверстие, ось которого перпендикулярна оси винта, резьбовой элемент, установленный в отверстии ползуна и предназначенный для взаимодействия с
0
5
резьбой винта, и средство фиксации ползуна относительно корпуса, связанное с резьбовым элементом, отличающийся тем, что, с целью повышения точности позиционирования и надежности фиксации, в ползуне выполнены два сообщенные с полостью отверстия, соосные с осью винта и предназначенные для взаимодействия с последним, резьбовой элемент установлен в отверстии ползуна с возможностью поступательного перемещения, а средство фиксации ползуна выполнено в виде резьбового стержня, жестко закрепленного на резьбовом элементе, гайки, взаимодействующей со стержнем, и планки, размещенной между гайкой и корпусом и предназначенной для взаимодействия с последним.
Щи г. 2
А-А
S
| Натяжное устройство для цепных передач | 1980 |
|
SU937837A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике, М.: Наука, 1971, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Петардонакладыватель для семафоров | 1924 |
|
SU928A1 |
| Самолетная самоустанавливающаяся лыжа | 1917 |
|
SU2277A1 |
