Устройство предназначено для передачи штучных грузов, размещенных на пале- тах 1, на приемно-передающие столы 2 технологического оборудования, например металлообрабатывающих или сборочных станков гибкой производственной системы.
Соединительное устройство снабжено автоматической системой маршрутовожде- ния, например оптической, и перемещается по трассе, зафиксированной оптической полосой 3.
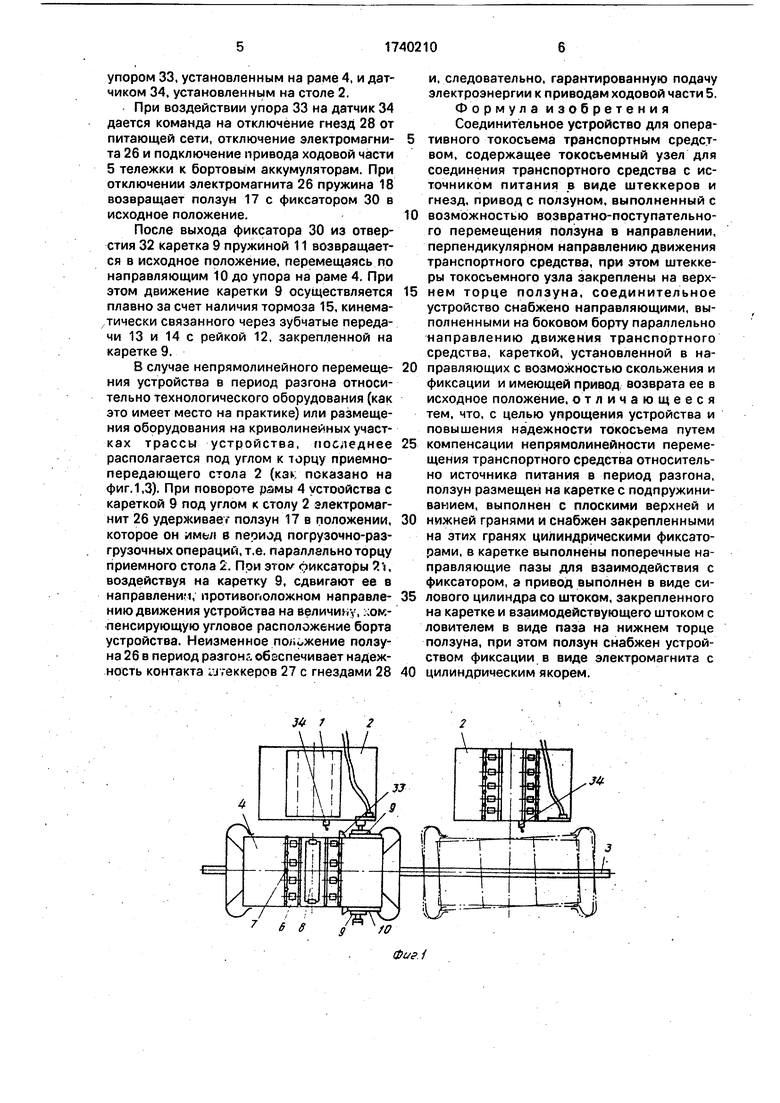
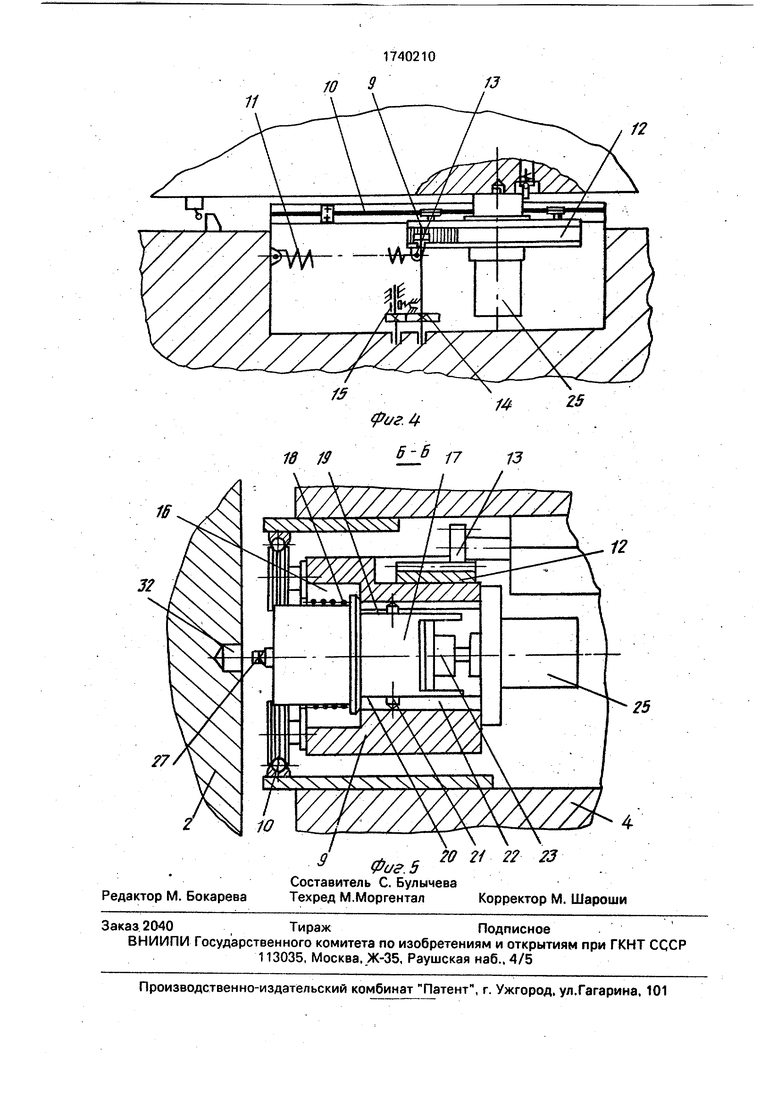
Соединительное устройство содержит раму 4 с приводной ходовой частью 5. На раме 4 установлены погрузочно-разгрузоч- ные механизмы, например приводной рольганг 6 с направляющими роликами 7, сталкиватель 8. а также аккумуляторные батареи (не показаны), Соединительное устройство контактным приводом, выполненным в виде неприводной каретки 9, установленной в направляющих 10 качения, размещенных вдоль бокового борта рамы 4 параллельно направлению движения тележки и имеющей привод возврата, выполненный, например, в виде возвратной пружины 11, зубчатой рейки 12, закрепленной на каретке 9, и кинематически связанного с ней через зубчатые передачи 13 и 14 регулируемого тормоза 15. На каретке 9 в предусмотренном гнезде 16 с возможностью перемещения в направлении к прием- но-передающему столу 2 технологического оборудования установлен ползун 17, подпружиненный относительно каретки посредством пружины 18. Ползун 17 выполнен с плоскими верхней и нижней гранями 19 и 20, на которых закреплены цилиндрические фиксаторы 21, входящие в поперечные направляющие пазы 22 каретки 9.
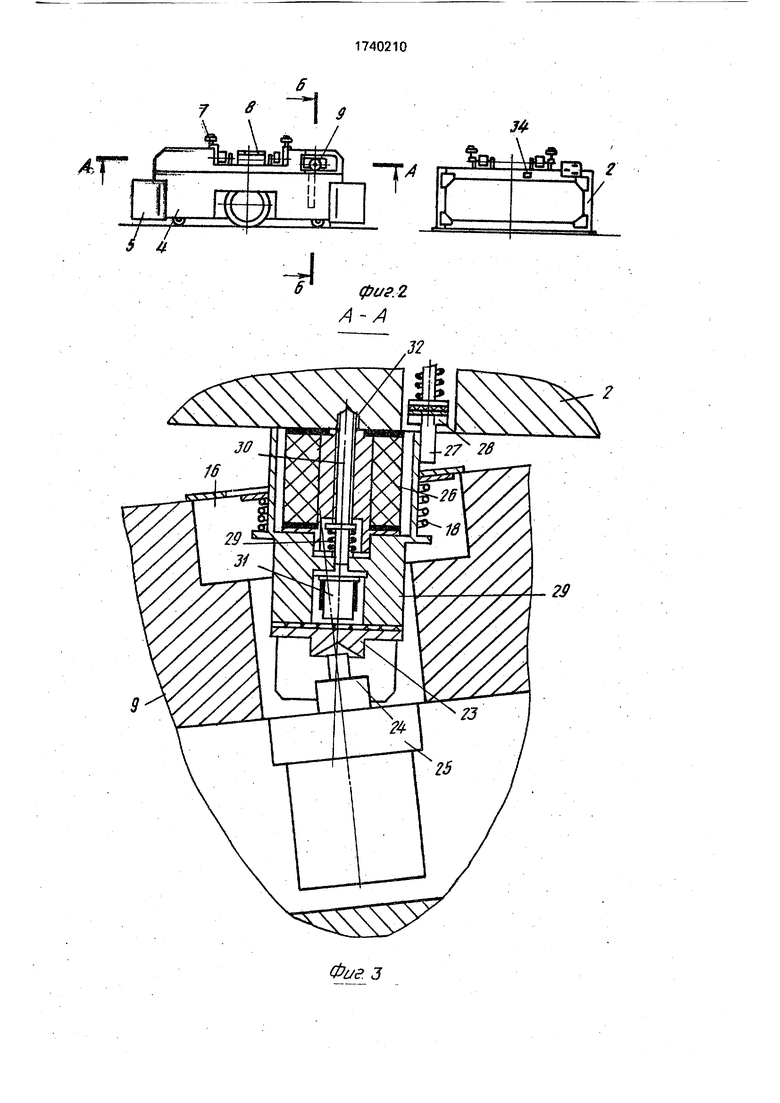
Плоские грани 19 и 20 предотвращают разворот ползуна 17 в вертикальной плоскости, а фиксаторы 21 обеспечивают ориентированное перемещение ползуна 17 относительно каретки 9. На конце ползуна 17 выполнен конический ловитель 23. в который свободно входит шток 24 гидроцилиндра 25, корпус которого закреплен на каретке 9. Внутри ползуна 17 жестко закреплен электромагнит 26. На ползуне 17 смонтированы штеккеры 27, входящие в гнезда 28, выполненные в столе 2 технологического оборудования я связанные с линией передачи электроэнергии. Ползун 17 снабжен подпружиненным к нему посредством пружины 29 фиксатором 30, установленным в центральном отверстии магнита 26, взаимодействующим одним концом с датчиком 31, а другим концом входящим в отверстие 32, выполненное в столе 2 технологического оборудования. На раме 4 закреплен упор 33, расположенный от датчика 34, закрепленного на столе 2, на длине, равной длине пути устройства в период разгона.
Соединительное устройство может быть
снабжено двумя контактными приводами, смонтированными на обоих боковых бортах рамы 4.
Соединительное устройство работает
следующим образом.
Устройство, например, на складе, загружается палетой с грузом и по фиксированной оптической полосой 3 трассе
перемещается к первому по технологическому процессу оборудованию, останавливаясь боковым бортом рамы 4 в строго определенном положении относительно приемно-передающего стола 2. Выдвигается шток 24 гидроцилиндра 25, который входит в конический ловитель 23 ползуна 17 и перемещает ползун 17 относительно каретки 9 до соприкосновения торца магнита 26 со столом 2. При этом фиксатор 20 входит в
отверстие 32 стола 2 до упора, сжимает пружину 29 и свободным концом воздействует на датчик 31.
При перемещении ползуна 17 его плоские грани 19 и 20, а также цилиндрические
фиксаторы 21 скользят по поперечным пазам 22 каретки 9, предотвращая разворот ползуна 17 в вертикальной плоскости, пружина 18 сжимается, а штеккеры 27 входят в гнезда 28, выполненные в столе 2 технологического оборудования. При воздействии фиксатора 30 на датчик 31, подается сигнал в цепь управления на подключение гнезд 28 к линии передачи электроэнергии. Через штеккеры 27 электроэнергия поступает на
систему подзарядки аккумуляторов, а также к приводам погрузочно-разгрузочных механизмов, к рольгангу 6 и сталкивагелю 8, которые перемещают налету на приемный стол 2. После окончания погрузочно-разгрузонных работ включается электромагнит 26, закрепляя ползун 17 на торце приемного стола 2, а шток 24 гидроцилиндра 25 возвращается в исходное положение, выходя из ловителя 23. После чего к линии передачи
электроэнергии подключаются приводы ходовой части 5. Устройство начинает перемещаться вдоль приемного стола 2 по трассе к следующему по технологическому циклу оборудованию. При этом фиксатор 20 и магнит 26 через ползун 17 удерживает каретку 9 в неподвижном положении, а рама 4 устройства скользит относительно каретки 9 и ползуна 17 на всей длине пути периода разгона. Длина пути устройства в период разгона определяется расстоянием между
упором 33, установленным на раме 4, и датчиком 34, установленным на столе 2.
При воздействии упора 33 на датчик 34 дается команда на отключение гнезд 28 от питающей сети, отключение электромагнита 26 и подключение привода ходовой части 5 тележки к бортовым аккумуляторам. При отключении электромагнита 26 пружина 18 возвращает ползун 17 с фиксатором 30 в исходное положение.
После выхода фиксатора 30 из отверстия 32 каретка 9 пружиной 11 возвращается в исходное положение, перемещаясь по направляющим 10 до упора на раме 4. При этом движение каретки 9 осуществляется плавно за счет наличия тормоза 15, кинематически связанного через зубчатые передачи 13 и 14 с рейкой 12, закрепленной на каретке 9.
В случае непрямолинейного перемещения устройства в период разгона относительно технологического оборудования (как это имеет место на практике) или размещения оборудования на криволинейных участках трассы устройства, последнее располагается под углом к торцу приемно- передающего стола 2 (каь показано на фиг. 1,3). При повороте рамы 4 устройства с кареткой 9 под углом к столу 2 электромагнит 26 удерживает ползун 17 в положении, которое он имья в период погрузочно-раз- грузочных операций, т.е. параллельно торцу приемного стола 2. Пои оиксаторы 9.), воздействуя на каретку 9, сдвигают ее в направление, противоположном направлению движения устройства на величину, .,ок- пенсирующую угловое расположение борта устройства. Неизменное понижение ползуна 26 в период разгочл обоспечивает надежность контакта игеккеров 27 с гнездами 28
и, следовательно, гарантированную подачу электроэнергии к приводам ходовой части 5. Формула изобретения Соединительное устройство для оперативного токосъема транспортным средством, содержащее токосъемный узел для соединения транспортного средства с источником питания в виде штеккеров и гнезд, привод с ползуном, выполненный с
возможностью возвратно-поступательного перемещения ползуна в направлении, перпендикулярном направлению движения транспортного средства, при этом штекке- ры токосъемного узла закреплены на верхнем торце ползуна, соединительное устройство снабжено направляющими, выполненными на боковом борту параллельно направлению движения транспортного средства, кареткой, установленной в направляющих с возможностью скольжения и фиксации и имеющей привод возврата ее в исходное положение, отличающееся тем, что, с целью упрощения устройства и повышения надежности токосъема путем
компенсации непрямолинейности перемещения транспортного средства относительно источника питания в период разгона, ползун размещен на каретке с подпружини- ванием. выполнен с плоскими верхней и
нижней гранями и снабжен закрепленными на этих гранях цилиндрическими фиксаторами, в каретке выполнены поперечные направляющие пазы для взаимодействия с фиксатором, а привод выполнен в виде силового цилиндра со штоком, закрепленного на каретке и взаимодействующего штоком с ловителем в виде паза на нижнем торце ползуна, при этом ползун снабжен устройством фиксации в виде электромагнита с
цилиндрическим якорем.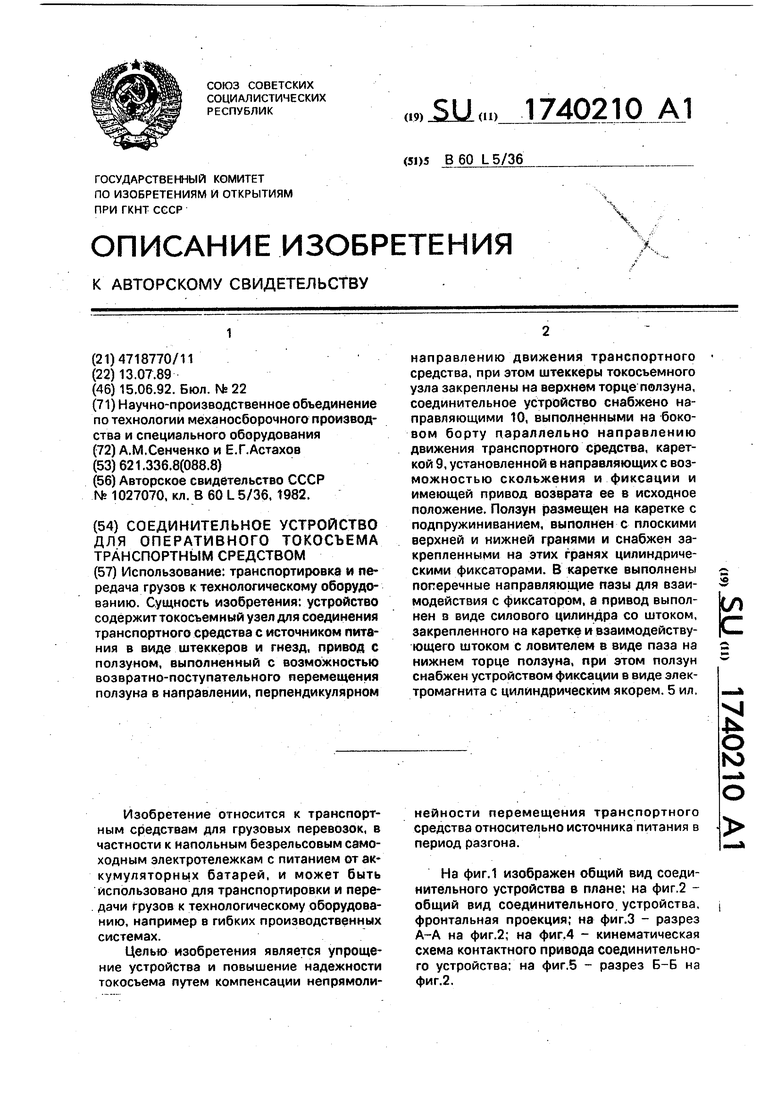

| название | год | авторы | номер документа |
|---|---|---|---|
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Металлорежущий станок с автоматической сменой инструментальных головок | 1987 |
|
SU1463427A1 |
| ТРАНСПОРТАБЕЛЬНЫЙ БОРТОВОЙ ПОДЪЁМНИК | 2015 |
|
RU2602269C2 |
| Погрузочное устройство трелевочного трактора | 1982 |
|
SU1092071A1 |
| Автоматизированная поточная линия для изготовления сварных конструкций | 1991 |
|
SU1784430A1 |
| Устройство для поштучной выдачи изделий | 1987 |
|
SU1671584A1 |
| Погрузочно-разгрузочное устройство на транспортном средстве | 1975 |
|
SU541696A2 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Контейнеровоз | 1987 |
|
SU1507611A2 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ НАСЫПНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ МАЛОЙ ПЛОТНОСТИ | 2011 |
|
RU2481998C1 |
Использование: транспортировка и передача грузов к технологическому оборудованию. Сущность изобретения: устройство содержит токосъемный узел для соединения транспортного средства с источником питания в виде штеккеров и гнезд, привод с ползуном, выполненный с возможностью возвратно-поступательного перемещения ползуна в направлении, перпендикулярном Изобретение относится к транспортным средствам для грузовых перевозок, в частности к напольным безрельсовым самоходным электротележкам с питанием от аккумуляторных батарей, и может быть использовано для транспортировки и передачи грузов к технологическому оборудованию, например в гибких производственных системах. Целью изобретения является упрощение устройства и повышение надежности токосъема путем компенсации непрямолинаправлению движения транспортного средства, при этом штеккеры токосьемного узла закреплены на верхнем торце ползуна, соединительное устройство снабжено направляющими 10, выполненными на боковом борту параллельно направлению движения транспортного средства, кареткой 9, установленной в направляющих с возможностью скольжения и фиксации и имеющей привод возврата ее в исходное положение. Ползун размещен на каретке с подпружиниванием, выполнен с плоскими верхней и нижней гранями и снабжен закрепленными на этих гранях цилиндрическими фиксаторами. В каретке выполнены поперечные направляющие пазы для взаимодействия с фиксатором, а привод выполнен в виде силового цилиндра со штоком, закрепленного на каретке и взаимодействующего штоком с ловителем в виде паза на нижнем торце ползуна, при этом ползун снабжен устройством фиксации в виде электромагнита с цилиндрическим якорем. 5 ил. нейности перемещения транспортного средства относительно источника питания в период разгона. На фиг.1 изображен общий вид соединительного устройства в плане; на фиг.2 - общий вид соединительного, устройства, фронтальная проекция; на фиг.З - разрез А-А на фиг.2; на фиг.4 - кинематическая схема контактного привода соединительного устройства; на фиг.5 - разрез Б-Б на фиг.2. сл с 3 ю о
J4
9 W
J4
i
Т i
/ л
Фиг. 3
ы
tes
/
фиг4 18 ISLJ /7
27
Редактор М. Бокарева
20 21 22 23
ч Техред М.МоргенталКорректор М. Шароши
3 Фиг. 5
Составитель С. Булычева
12
| Устройство для соединения чугуновоза с источником электропитания | 1982 |
|
SU1027070A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
