2
tasA.
СП
N
ю
3150
Изобрете1пле касается транспортного маил-нюстроения 5 а 1-1мепью тейиеоовозов5 и является дополнительным к изобретению по авт ев №1418121,
Цель изобретения - улучшение условий эксплуатации.
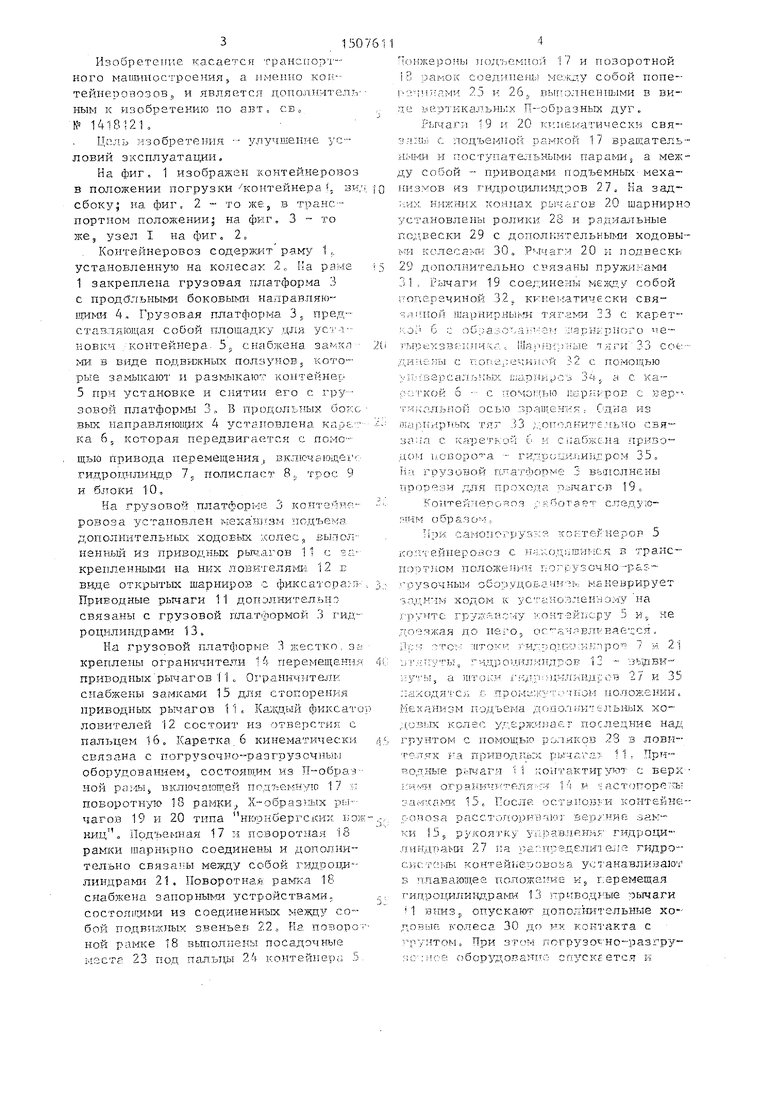
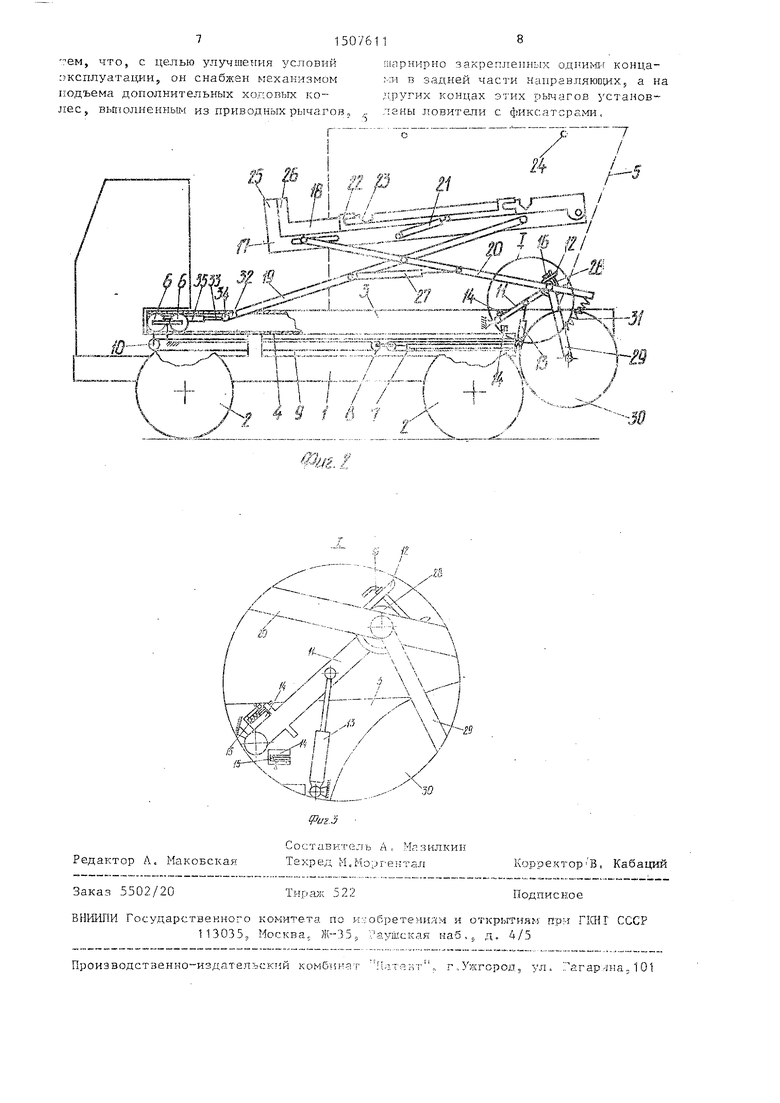
На фиг, 1 изображен контейнеровоз в положении погрузки контейнера L зи/ сбокуI на фиг, 2 - то жб:, в транспортном положении; на фкг, 3 то же, узел I на фиг. 2.
Контейнеровоз содерзв:ит раму 1 ,. установленную на колесах 2 о Ка раме 1 закреплена грузовая платформа 3 с продальными боковыш-1 направляюпгими 4, Грузовая платформа 3 пред
ставляющая собой площадку для ус-гл-- новкя контейнера. 5 снабжена замкл ми в виде подвгскных ползунов, кото- рь-е замыкают и чшнтейнер 5 при установке и снятии его с гру-- зовой платформы 3„ В продольных бокс вьпс напра зляюш,их 4 становлена Kapf ка 65 которая передвигаетс.ч с помо щыо привода перемещения, включающе / гидроцнлинп;р 7, полкспаст 8,, трос 9
и 6jTOKH 10,
На грузовой платформе, 3 кайтемнс- розоза установлен меха низм подъема дополнительных ХОДОБЬК колее выполненный из приводных рьщагов 11 с крепленными на них ловителям-;. 12 Е ви,це открытькк шарниров с фиксатор а::-лПриводные рычаги 11 допэл лительно связаны с грузовой пла.тформой 3 гидроцилиндрами 13.
На грузовой платформе 3 жестко, з.л креплены ограничител.и 14 перемещеш я приводных рычагов 11 „ Ограничнт«шк снабжены замками 15 для стопоренкя приводных рычагов 11 Кшадый фикса 1 a ловителей 12 сострит из отверстия с пальцем 16. Каретка 6 кинематически связана с погрузочно--разгрузо чнлл.; оборудованием, состоятдим и:з П-образной pai-ibij включающей подъемную 17 А;: поворотную 18 рамки, Х-образИг х ры-- чагов 19 и 20 типа Нюрнберг с.кик. 1.;ож ниц „ Пoдъe й aя 17 и поворотная 18 рамки шарнирно соединены и дополнительно связа ы между собой гидpoп - линдра№-1 21. IIoBopoTHa.fi рамка 1В снабжена запорныьда устройствами. состоя1 :,ими из соединенных ме:вду собой подвшхпых звеньев 22, На повороной рамке 18 вьтолнены посадочные ыэста 23 под пальцы 24 контейнера 5
.4
Понжерои од ьемио;) 17 и позоротной 18 рамок соеднпеш; между собой попе- 25 и 26, выгголненшлми в ни- ;ie ьертккальных П-образньи дуг „
Рычаги 19 It 20 кянег- атически свя-- злн1) с подъемной рамкой 17 вращатель- ными и поступатеотьнымк парами, а между собой - приводами п.одъемных- механизмов из Г и.дроцилиндров 27. Ка зад- конпах рычагов 20 шарнирно ус1- ановлены ролики 28 и радиальные под,Бески 29 с дополкктельныт.ш ходовыми колесанп 30. Рычаги 20 и подвескк 2У дополнительно связаны пружинам - 31, Рьмаги 19 соединены межд.у собой поперечиной 32,, ккнеьгатически свя ч,. шарнирньп- Ш тягами 33 с карет- i-vOi Ь с об;;а.;о ..йi i- Ct :-;1ярн :т Н(;го че- гьгое звг:: ;иич; . liiaruDi ; ньш т лги 33 cot:- дИ и;;МЫ с пот:е,;е5;ииг й 32 с помощью yii;ieepcaJLb;ihrx. jjiapiinpcis Зч, а с ка- р.:;ткой б - с помо гью исрНгроЕ с вер--, гикалыюй осью г из |Яа| нирпых тяг 33 ;.;ополни7 ельно связала с кареткой о i.;; С ;абке.на приво™ ц«.1 iiCBopoT-a - гк ;рг;ил,11Иигром 35. На грузовой платформе 3 вьаюлнены
KOI т е и I в г- .о Я о 3 :.- :пчм обр аз О . о
ри саьюпогруз; й коктег нерор 5
ко. 5тейпероаоз с пч. в транс- почтгюм положенин Г:огрузочно-р оузочкьхм оборудоЕ. маневрирует за, ходом к устанозленуому на r-pyi-TTC : :онТ 2Й1 :сру 5 и не доезжая до nei-o ос -ачявлгвав ся.
Гм;:-т Г-гТО :- :ИТОКИ Т- ИД pOUK.i ;К in р Q- i У. 2
. г чд13О). ил;-:идроЕ 13 - вь дви::аходятс)1 г. проно;;(ут - тком по.;аожении. Механизм подъема ,с(шолии 1ельных хо колес уд рж:чнаьт последние над грунтом с помошью рол.яков 23 з лови- Т9.УГЯХ va приводпьз: рычага. 1 , Приводные рычаги 1 ;;оптакти1: ;дот с верх огрянич Р:т;я. Н V - астопорс ш зам самк 15с После ocraiioBj H контейне оопоза расстог ориваюг зак ки 15 ру шятку yiipaB.iiRHHS гкцроци-- линдтш м 27 па раппределит гидро- CHCTGi-ibi контейьеровойа ус1 анавливают в п.лавагощее по.ложеиие н,, г;еремещая гицроцилиндрами 13 пркводг-ме рычаги М вниз5 опускают допелюгге.яьные хо-- довый колеса 30 дг и к к.-эктакта с 1 пуг1тоьь При этом погрузот: но--разгру- ; борз доваяпо спускгется к
51
приближается к грузовой платформе 3. Приводные рычаги 11 перемещаются до контакта с нижними ограничителями 14. Затем прекращают подачу масла в гидроцилиндры 13 и 27 и вынимают пальцы из отверстий ловителей 12, Выдвигая шток гидроцил1- ндра 7 через полиспаст 8, трос 9 и блоки 10 перемещают назад каретку 6 и погрузочно- разгрузочное оборудование, освобождая грузовую платформу 3, Дополнительные ходовые колеса 30 перекаты- ваготся по грунту, ролики 28 выходят из контакта с ловителями 12, а подъ- емная 17 и поворотная 18 рамки охватывают контейнер 5, Гидроцилиндр 35 удерживает П-образную раму от поперечных перемеп;ений относительно продольной оси контейнеровоза о Пере- мещение погрузочно-разгрузочпот о оборудования осуществляется до к.л такта поперечины 26 поворотной рамкр 1В с контейнером 5, Гидро11;ил1-п:драм 1 27 ос тцествляют подъем П-образной захватывая посадочныьга местами 23 поворотной 18 пальцы 2 i контейнера 5„ Контейнер 5 поднимается на высоту, обеспечивающую его свободное, перемещение над грузовой платформой 3 Одновременно гидрощ-шиндрами 21 пе- ремеп);ают подвижные звенья 22 запорного устройства до сопряжения их вьфе- зов с пальцами 24 контейнера 5„ Дале
гидро1щлиндра№-1 7 втягияая их штоки
перемещают вперед каретку 6 и погру- зочно-разгрузоч.иое оборудование с груженььм контейнером 5 по продольным
боковым направляющим 4 грузовой плaтфop &I 3, При этом дополнительные ходовые колеса 30 перекатываются по грунту. При различной массе груза в контейнеровозе 5 или при отсутствии его дополнительные ходовые колеса 30 воспринимают разную нагрузку и пру- жины 31 сжимаются на различные величины, поэтому высота расположения роликов 28 относительно грунта непостоянна о Перемещая гидроцилиндрами 13 приводные рычаги 1 I, устанавливаю ловители 12 относительно грунта на одну высоту с роликами 28, которые входят в сопряжение с ловителями 12, после чего прекращают перемещеьше каретки 6. Пальцы 16 устанавливают в отверстия ловителей 12. Приводные рычаги 11 перемещают гидроциливдра- ми 13 до упора с нижними ограничителями 14 и стопорят замками 15, Ру1 1t,
коятку управления гидротгилг-тидрат-тм 27 на распределителе гидросистемы ког/ге неровоза устанавливают в пл.пвгю- и е положение и, перемещая гидротшлинц - ром 7 кареткз б вперед, onvcKarnT П- образную с контейнерот .; 5 до такта его днища с т р зовой платйор-- мой 3, Контейнер 5 прижим:;ется к грузовой платформе 3 П-обраэной рамо и дополнителытс ф11кси зуется на ней с помощью подвикньх ползунов, Дспо.и-п-;- тельные ходовые колеса 30 Boci7pnin-i мают часть нагрузки от ко тейкеро воза, погрузочно-разгрузочного рудования и грз женного контейнера 5 Контейнеровоз транспортирует гру™ ;келый контейнер 5 к г .есту пазнячсн гя где осуигествляется его car ODasrrysKa Саморазгрузх г о);;ст выполняться - утел снятия груженого кол тей ; ; -: 5 с коптейнеровоза Ji уста;;сЕ:с, ;:г; пло-- щалке или пy гe ; вы пуркп ГР} ;; из кО Ггейпера 5, .- контгйисрл 3 с ко тсйнерово а и ;- С га его на
грунт СС5 ::;ССТ;:Л;:АЧ СЯ Р браТ ЮЙ Ю следовател ы-ости„
Быгр ;. зка ко тсГ-не.рз 5 осуществляется следующие образом:
Р у к о я т к у р 5 с п р е д ел - j т ел я , ул р а Б л я - ющсго гидрслилиггдрогч 7. переводят в плава О цее пологгенгае, ГуЩро1П линдра :.г) 27 поднимают П-образиую раргу с го1:тсй иером 5 над гоузовой платформой 3 и г ;лроцилиндря;- и 21 опгок щы:тают поворотную рамку 1S с зафиксг рорлп мь: на ней KOKTeiii-ei GM э. После выгрузки груза контей:-:ср 5 транспортируют к месту загрузкт;, гд - его снимяуот с контейнерозоза м устанавлнвачтг ка грунт При движем:-: -; ко:ктейнеровоза с иО- рожним контейнером 5 i-ши без него
гидроцилиндра ш 13 перемещают привод- ,ные рычаги 11 до контакта с верхгйими ограничителя 14 и стопорят 3at-ri a - ми 15, Дополнительные ходовые колеса 30 вывешены относительно грунта механизмом их подъема.
Контейнеровоз может транспортировать также два контейнера. Самопогрузка и саморазгрузка контейнеров осуществляется аналогично oпиcaннo выше,
Формула изобретения
Контейнеровоз по авт св., Р 1418121, о т л и ч а ю ц к и с я
: ем, что, с целью улучшения условий шарнирно закрепленных конца- :жсплуатации, он снабжен механизмом :--;и в задней части нанравляюпщХ; а на подъема дополнительных ходовых ко- д.ругих концах этих рычагов установjiec, вьтолненным из приводных рычагов,, ланы ловители с фиксаторами.
i

| название | год | авторы | номер документа |
|---|---|---|---|
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| КОНТЕЙНЕРОВОЗ | 1991 |
|
RU2022832C1 |
| Контейнеровоз | 1981 |
|
SU992261A2 |
| КОНТЕЙНЕРОВОЗ | 1995 |
|
RU2112669C1 |
| Контейнеровоз | 1978 |
|
SU691316A1 |
| Контейнеровоз | 1984 |
|
SU1194725A1 |
| Контейнеровоз | 1988 |
|
SU1556958A1 |
| Контейнеровоз | 1988 |
|
SU1572856A1 |
| Контейнеровоз | 1980 |
|
SU921903A2 |
| Полуприцеп-контейнеровоз | 1989 |
|
SU1782807A1 |
Изобретение относится к транспортному машиностроению, а именно к контейнеровозам. Цель изобретения - улучшение условий эксплуатации. Контейнеровоз имеет раму с колесами 2, дополнительными ходовыми колесами 30 и грузовой платформой 3 с контейнером 5. Грузовая платформа 3 имеет боковые направляющие 4 с кареткой 6, снабженной приводом. Погрузоразгрузочное оборудование состоит из П-образной рамы, включающей подъемную рамку 17 и поворотную рамку 18, Х-образные рычаги 19, 20 по типу "нюрнбергских ножниц". Контейнеровоз снабжен механизмом подъема дополнительных ходовых колес 30, установленных в направляющих грузовой платформы 3, выполненным из приводных рычагов 11 с ловителями 12 на одном конце и фиксаторами, а другой конец приводных рычагов 11 шарнирно закреплен в направляющих грузовой платформы 3. 3 ил.
Редактор Л. Маковская
Составитель А, Мязилкин Техред M.Mo;jrei;TaJ
Заказ 5502/20
ВНИИПИ Государственного комитета по иг обретеинлм и открьггиям пр:- riQir СССР 113035з Москва, Ж--35,, Гауйгская наб. „ д. ч/5
Производстзенко-издательский комбинат Плтякт Ч гЛ жгород, ул. 7ггарлиа„ 101
J5
Корректор в. Кабаций
Подписное
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
