Изобретение относится к приводам горных машин и может быть использовано для ограничения динамических нагрузок механизмов поворота и копающих механизмов экскаватора.
Цель изобретения - повышение надежности работы экскаватора за счет повышения эффективности работы регулятора электопривода.
Изобретение поясняется прилагаемым чертежом, на котором приведена функциональная схема устройства комбинированного управления электроприводом поворота экскаватора.
Устройство оптимального управления электроприводом копающих механизмов одноковшового экскаватора содержит последовательно соединенные командоаппа- рат 1, сумматор 2, контур питающего напряжения 3, представляющий последовательно соединенные датчик питания напряжения 4, регулятор напряжения 5, суммирующий магнитный усилитель 6 и генератор 7, а также двигатель 8, упругий элемент 9 и поворотную платформу 10. Выходы датчика тока 11, скорости двигателя 12, упругого момента 13 и скорости платформы 14 соответственно соединены входами вх.1, вх.2, вх.З и вх.4 оптимального регулятора 15, выход которого соединен со вторым входом сумматора 2. Регулятор 15 состоит из четырех интеграторов 16-19, восьми неинвертирующих усилителей: первого 20,второго 21, третьего 22., четвертого .23, пятого 24, шес- трго 25, седьмого 26, восьмого 27 и двух инвертирующих усилителей 28, 29. Первые входы интеграторов 16-19 соединены соответственно с входами вх.1, вх.2, вх.З, вх.4 регулятора 15. Выход интегратора 16 через первый усилитель 20 соединен с выходом регулятора 15, а через пятый усилитель 24 со вторым входом второго интегратора 17. Выход второго интегратора 17 через усили- тель 21 соединен с входом первого интегратора 16 и через усилитель 26 с входом третьего интегратора 18. Выход третьего .интегратора 18 через четвертый усилитель 23 соединен с входом второго интегратора 17, через третий усилитель 22 с входом первого интегратора 16 и через восьмой усилитель 27 со входом четвертого интегратора 19. Выход четвертого интегратора 19 через шестой усилитель 25 соединен со входом третьего интегратора 18.
Устройство работает следующем образом.
С выхода командоаппарята 1 задающий сигнал управления электроприводом поступает на первый вход сумматора 2, где суммируется с сигналом оптимального
управления с выхода регулятора 15. С выхода сумматора 2 сигнал управления поступает в контур напряжения 3, суммируясь в регуляторе напряжения 5 с сигналом обратной связи с датчика напряжения 4. В контуре напряжения за счет регулятора напряжения, компенсирующего постоянные времени магнитного усилителя 6 и генератора 7, формируется форсированное
0 напряжение, питающее якорь двигателя 3. Датчики тока 11, скорости двигателя 12, упругого момента 13, скорости второй массы 14 вырабатывают соответственно сигналы тока ядерной цепи, скорости двигателя, уп5 ругого момента и скорости второй массы, которые поступают соответственно на первый, второй, третий и четвертый входы регу- Лятора 15 и затем на первые входы соответственно интеграторов 16, 17, 18, 19.
0 Регулятор 15 вырабатывает оптимальный сигнал управления, минимизирующий среднеквадратичные отклонения задающего сигнала управления электроприводом с ко- мандоаппаратом 1, сигналов тока якорной
5 цепи, с датчика тока 11, скорости двигателя сдатчика 12, упругого момента с датчика 13 и скорости второй массы с датчика 14. Регулятор 15 формирует сигналы первой внутренней координаты регулятора на выходе
0 интегратора 17, второй внутренней координаты регулятора на выходе интегратора 18, третьей внутренней координаты регулятора на выходе интегратора 19 и внешней координаты на выходе интегратора 16, который
5 является формированным благодаря наличию в цепи обратной связи инвертирующего. усилителя 28. Сигнал первой внутренней координаты регулятора получают в результате интегрирования в интеграторе 17 сигнала
0 скорости с датчика скорости 12, сигнала внешней координаты регулятора с выхода интегратора 16, усиленного в усилителе 24, и сигнала второй внутренней координаты, усиленного в усилителе 23. Сигнал второй
5 внутренней координаты регулятора 15 на выходе интегратора 18, который является формированным благодаря наличию в цепи обратной связи инвертирующего усилителя 29, получают в результате форсированного
0 интегрирования сигнала упругого момента с датчика упругого момента 13, сигнала первой внутренней координаты регулятора 15 на выходе интегратора 17, усиленного усилителем 26, и сигнала третьей внутренней
5 координаты с интегратора 19. усиленного усилителем 25. Сигнал третьей внутренней координаты регулятора 1й на выходе интегратора 19 получают в результате интегрирования сигнала скорости второй массы с датчика 14 и сигнала второй внутренней координаты с выхода интегратора 18, усиленного усилителем 27. Сигнал внешней координаты регулятора 15 получают на выходе интегратора 16 в результате форсированного интегрирования сигналов тока якорной цепи с датчика тока 11, первой внутренней координаты регулятора, усиленного усилителем 21, и второй внутренней координаты регулятора с выхода интегратора 18, усиленного усилителем 22. Оптимальный сигнал управления на выходе регулятора 15 получают в результате усиления сигнала внешней координаты регулятора с выхода интегратора 16 в усилителе 20.
Положительный эффект предлагав- мого изобретения состоит в том, что преобразование текущих значений тока якорной цепи, скорости двигателя, упругого момента и скорости второй массы по сравнению с прототипом осуществляют в аналитически конструируемом оптимальном регуляторе, который вырабатывает управляющий сигнал из условия минимизации среднеквдра- тичного отклонения тока якорной цепи, скорости двигателя упругого момента и ско- рости второй массы (платформы) от их установившихся значений при минимизации расхода энергии управления, что позволяет оптимизировать переходные процессы, ограничить динамические нагрузки в механи- ческой части на 18-20% и тем самым повысить надежность работы экскаватора. Формула изобретения 1.Устройство комбинированного управления электроприводом поворота экскава- тора, содержащее последовательно соединенные компаратор, сумматор, контур напряжения, выполненный из датчика напряжения, подключенного к регулятору напряжения, соединенного через суммирующий магнитный усилитель с генератором электропривода, датчики тока, скорости двигателя, упругого момента и скорости второй массы соединены с входами регулятора, выход которого подклю- чен к другому входу сумматора, отличающееся тем, что. с целью првышения надежности работы экскаватора, регулятор выполнен на четырех интеграторах, на восьми неинвертирующих усилителях и двух ин- вертирующих усилителях, при этом выходы датчиков тока, скорости, упругого момента и скорости второй массы подключены к первым входам соответственно первого, второго, третьего и четвертого интегратора,
выход первого интегратора через первый чеинвертирующий усилитель соединен с выходом регулятора, через второй неинвертирующий усилитель - с вторым входом вто- рого интегратора и через первый инвертирующий усилитель с вторым входом первого интегратора, выход четвертого интегратора через третий неинвертирующий усилитель соединен с вторым входом третьего усилителя, выход которого через четвертый неинвертирующий усилитель соединен с третьим входом второго интегратора, через пятый неинвертирующий усилитель - с вторым входом четвертого интегратора, через второй инвертирующий усилитель - с третьим входом третьего интегратора и через шестой неинвертирующий усилитель с третьим входом первого интегратора, выход второго интегратора через, седьмой неинвертирующий усилитель соединен с четвертым входом первого интегратора и через восьмой неинвертирующий усилитель с четвертым входом третьего усилителя.
2. Устройство поп.1,отличающее с я тем, что коэффициент усиления первого усилителя равен отношению коэффициента усиления замкнутого контура питающего напряжения к индуктивности якорной цепи двигателя, коэффициенты усиления седьмого и восьмого усилителей равны отношению конструктивной постоянной двигателя к приведенному моменту инерции двигателя, коэффициент усиления шестого усилителя равен отношению произведения конструктивной постоянной двигателя на коэффициент вязкого трения к приведенному моменту инерции двитателяТкоэффициент усиления второго усилителя равен отношению конструктивной постоянной двигателя к индуктивности якорной цепи, коэффициенты усиления четвертого и пятого усилителей равны коэффициенту жесткости и коэффициент усиления третьего усилителя равен величине, обратной приведенному моменту инерции второй массы, кроме того,коэффи- циент усиления первого инвертирующего усилителя равен величине, обратной электромагнитной постоянной времени якорной цепи двигателя, а коэффициент усиления второго инвертирующего усилителя равен отношению произведения коэффициента вязкого трения на суммарный момент инерции к произведению приведенных моментов инерции двигателя и второй массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
| Устройство для ограничения динамических нагрузок в экскаваторных механизмах | 1986 |
|
SU1416627A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
Изобретение содержит последовательно соединенные командоаппарат 1, сумматор 2, контур питающего напряжения 3, выполненный из последовательно соединенных датчика напряжения 4 и регулятора напряжения 5, суммирующий магнитный усилитель 6 и генератор 7, а также двигатель 8, упругий элемент 9 и поворотную платформу 10, датчик тока 11, датчик скорости двигателя 12. датчик упругого момента 13 и датчик скорости платформы 14. Все датчики подключены к-регулятору напряжения 15. Регулятор выполнен из четырех интеграторов 16-19, восьми неинвертирующих усилителей 20-27 и двух инвертирующих усилителей 28-29. 1 ил. I Ж. ,. г - |5 - 2 5 13 СО С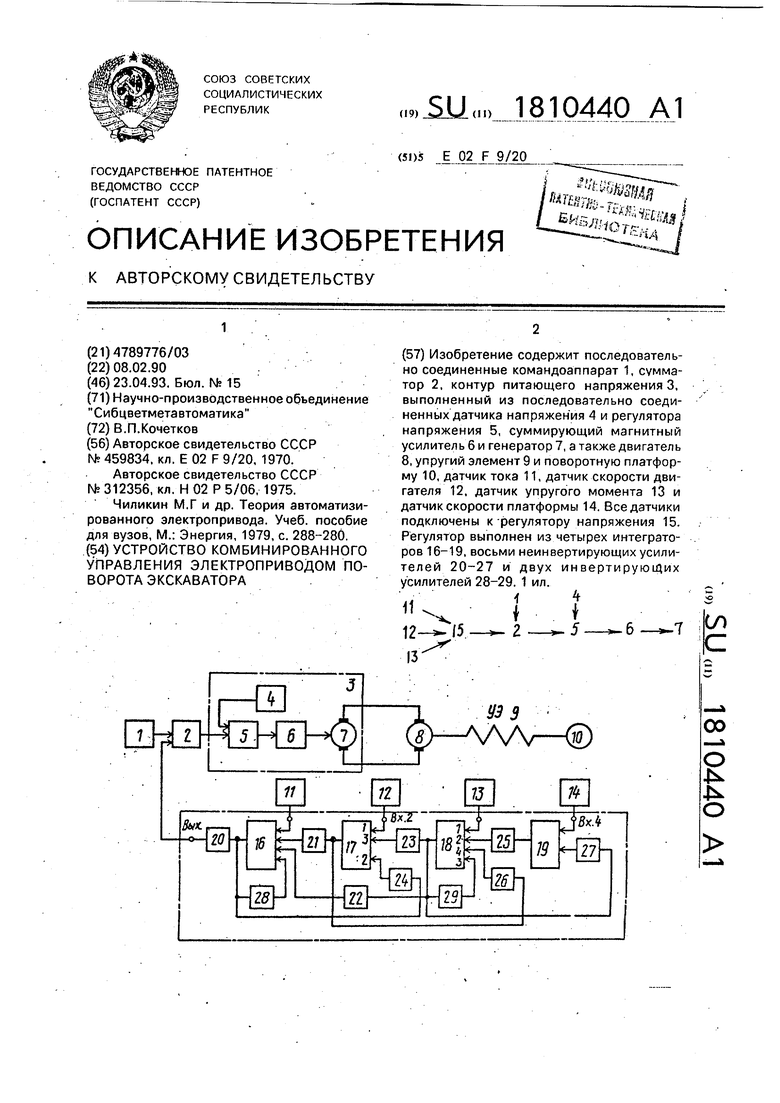
| Устройство для ограничения ударных нагрузок при выборе зазоров в механизмах поворота экскаватора | 1970 |
|
SU459834A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УДАРНЫХ НАГРУЗОК В ЭЛЕКТРОПРИВОДЕ | 0 |
|
SU312356A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Чиликин М.Г и др | |||
| Теория автоматизированного электропривода | |||
| Учеб | |||
| пособие для вузов, М.: Энергия, 1979, с | |||
| ДВОЙНОЙ ГАЕЧНЫЙ КЛЮЧ | 1920 |
|
SU288A1 |
