Изобретение относится к гидроавтоматике и может быть использовано в конструкциях промышленных роботов и манипуляторов.
Цель изобретения - расширение диапазона применения и повышения точности за счет компенсации внешнего статического момента.
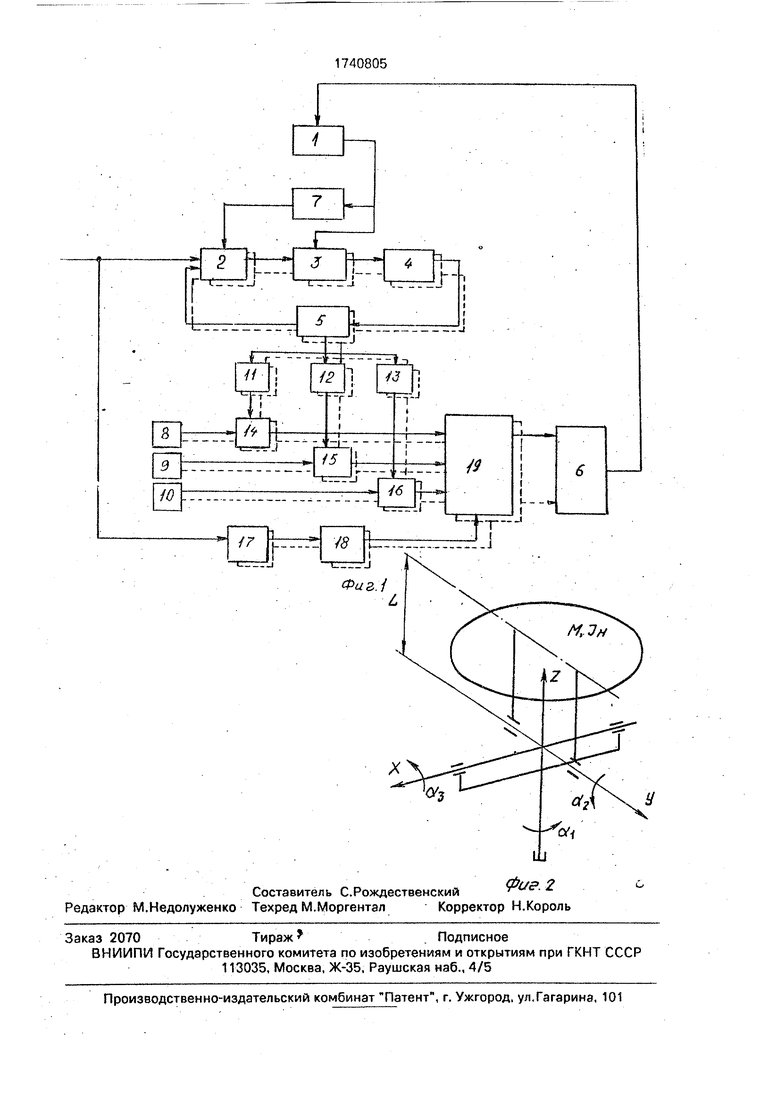
На фиг.1 изображена принципиальная схема системы; на фиг.2 - кинематическая схема системы.
Система управления комплексом электрогидравлических следящих приводов, расположенных на подвижном основании содержит регулятор 1 давления, подключенные к нему, например, три электрогидравлических следящих привода, каждый из которых содержит последовательно соединенные блок 2 управления, электрогидравлический усилитель 3, подключенный к выходу регулятора 1 давления, пластинчатый (лопастной) гидродвигатель 4, на выходном валу (не показан) которого установлен датчик 5 положения, связанный с входом блока 2 управления, блок 6 выбора максимального давления, соединенный своим выходом с входом регулятора 1 давления, датчик 7 давления, установленный на выходе регулятора 1 давления, и подключенный своим выходом к блоку 2 управления каждого привода,
включающего датчики 8, 9, 10, линейных ускорений основания (не показано) по взаимно перпендикулярным направлениям (координатам) X, Y, Z соответственно, преобразователи t1, 12, 13 координат, по- следовательно соединенные с блоками 14, 15, 16 умножения, блок 17 дифференцирования входного сигнала, последовательно соединенный с нелинейным элементом 18, и сумматор 19 с четырьмя входами, причем входы преобразователей 11, 12, 13 координат соединены с датчиком 5 положения каждого привода, второй вход каждого из блоков 14, 16 16 умножения соединен с выходом соответствующего датчика 8, 9, 10 линейных ускорений, три входа каждого сумматора 19 соединены с выходами блоков 14, 15 16 умножения, четвертый вход сумматора 19 соединен с выходами блока нелинейного элемента 18, а выходы всех сумматоров 19 с входами блока 6 выбора максимального давления.Усилители 3 имеют распределительные окна (не показаны). Валы гидродвигателеи связаны с нагрузкой.
Система управления комплексом электрон.,,равлических следящих приводов работает следующим образом.
Сигналы управления на приводы qi(qi,,..,qn) поступают на блоки 2 управления, где происходит их сравнение с сигна- лами датчиков 5 положения, установленных на выходных валах гидродвигателей 4, и выделение ошибки приводов. Сигнал ошибки привода, усиленный в блоке 2 управления, является управляющим для электрогидравлического усилителя 3 и поступает на его вход. Сигнал с выхода усилителя 3 вызывает перемещение выходного вала гидродвигателя 4 и, как следствие, изменение сигнала с датчика 5 положения до тех пор, пока он не сравняется с сигналом управления qi. Таким образом, происходит обработка управляющего сигнала в каждом замкнутом по положению электрогидравлическом следящем приводе. Одновременно с этим происходит настройка давления гидропитания приводов. Определяется требуемое давление питания каждого привода в зависимости от скорости входного воздействия, величины внешнего статического момента, действующего на привод при движении основания с ускорением и конструктивных параметров привода. Величина статического момента МСт1, действующего на каждый привод определяется величина- ми линейных ускорений X, V, Z, по взаимно перпендикулярным направлениям измеря- емыми датчиками 8,9 и 10 линейных ускорений, угловыми координатами приводов аи,
измеряемыми датчиками 5 положения приводов и кинематической схемой системы. Величины давлений Р0| от приводов поступают на вход блока 6 выбора максимального давления, где происходит выбор максимального из них Ро, на которое и настраивается регулятор 1.
Уравнение расходов гидродвигателя имеет вид
От
qn
О)
где Xi - относительное открытие окна усилителя;
(7mi - максимальная проводимость окна
усилителя;
Р0| - давление питания; Qri - радиальная производительность гидродвигателя;
СА - угловая скорость движения привода (скорость входного воздействия);
A PHI - перепад давления з рабочих полостях гидродвигателя, определяемый уравнением динамики нагрузки, имеющим вид
на A PHI -qri- MCTI,(2)
где IH - момент инерции нагрузки;
щ - угловое ускорение нагрузки;
Мет - статический момент 1-го привода.
Выражение для определения давления питания получается при совместном решении уравнений (1) и (2) относительно Р0|, например, при открытии окна усилителя х 0,7:
q iL+XnA + McTi
О ml
X
qn
qn
О)
Величина статического момента Мет з неподвижной системе координат X, Y, Z равна
Мст М|Ух2 + Y2 ,(4)
где М - масса нагрузки;
L- плечо, на котором действует момент Мст.
Величина статического момента каждо- го привода MCTI равна величине проекции вектора МСт на ось Z системы координат, связанной с приводом.
MCTI ML (Y Kyi + X -Kxi + Z Kri) (5) гдеКх1 , KYI -cosa i cos аг,
KX2 - 0, Ky2 Sin a 1 COS «3 ,
Kz2 -COS(3SinG2 (6)
Кгз cos GI cos 03 sin a - sln«2 sin 03 КУЗ -cos a cosct з ,
Кгз cosa 1 slna з + cos« з since i sin og
Каждый из коэффициентов KXI, KYI, Kzs в выражениях (6) определяется с помощью преобразователя 13, 12, 11 координат.
Умножение выходных сигналов датчиков 8,9,10, линейных ускорений основания на выходные сигналы преобразователей 13, 12,11 координат производится блоками 16, 15, 14 умножения. Величина проекции момента на ось 1-го привода MCTI определяется при суммировании его составляющих, пол- ученных на выходах блоков 14, 15, 16 умножения в сумматоре 19. Кроме того, эти составляющие умножаются на коэффициент ML/qri и суммируются с сигналом, рав- ным квадрату скорости входного воздействия, умноженному на коэффициент
/q2rt/ ffm /2 получаемым на выходе нелинейного элемента 18.
« Скорость входного воздействия ai
получается при дифференцировании входного воздействия qi блоком 17 дифференцирования. Таким образом определяются сигналы, соответствующие величинам требуемого давления питания для каждого привода. Эти сигналы поступают на вход блока 6 выбора максимального давления, выходной сигнал которого и является управляющим сигналом для регулятора 1 давления, осуществляющего настройку давления питания.
5
0 5 0
R
0
5
Формула изобретения Система управления комплексом электрогидравлических следящих приводов, расположенных на подвижном основании, содержащая последовательно соединенные блок выбора максимального давления и регулятор давления с датчиком давления на выходе, а также электрогидравлические следящие приводы, каждый из которых включает последовательно связанные блок упразления,электрогидравлическим усилитель, подключенный к выходу регулятора давления, и гидродвигатель с датчиком положения выходного вала, подключенным к одному из входов блока управления, другой вход которого соединен с датчиком давления, отличающаяся тем, что, с целью расширения диапазона применения и повышения точности за счет компенсации внешнего статического момента, она снабжена тремя датчиками линейных ускорений по взаимно-перпендикулярным направлениям, а каждый электрогидравлический следящий привод снабжен тремя блоками умножения, тремя преобразователями координат и последовательно включенными блоком дифференцирования сигнала управления, нелинейным элементом и сумматором, причем выход каждого из последних соединен с входом блока выбора максимального давления, а входы - с выходами всех блоков умножения привода, один вход каждого из которых соединен с датчиком линейного ускорения, а другой через преобразователь координат - с датчиком положения выходного вала гидродвигателя.
Фаг /

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Система управления электрогидравлическим манипулятором | 1977 |
|
SU714348A1 |
| Система управления электрогидравлическим манипулятором | 1987 |
|
SU1439296A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708477C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| Электрогидравлический следящий привод | 1980 |
|
SU928093A1 |
Использование: в конструкциях промышленных роботов и манипуляторов. Сущность изобретения: приводы расположены на подвижном основании. Последовательно соединены блок выбора макс. давления и регулятор давления с датчиком давления на выходе. Каждый следующий привод состоит из последовательно связанных блока управления, электрогидравлического усилителя, подключенного к выходу регулятора давления. Датчик положения выходного вала подключен к одному из входов блока у правления, другой вход к-рого соединен с датчиком давления. Каждый привод снабжен тремя блоками умножения, тремя преобразователями координат и последовательно включенными блокам дифференцирования сигнала управления, нелинейным элементом и сумматором, причем выход каждого из последних соединен с входом блока выбора макс, давления, входы - с выходами всех блоков умножения привода. Один зход каждого блока умножения соединен с датчиком линейного ускорения, другой через преобразователь координат - с датчиком положения выходного вала гидродвигателя. 2 ил.
| Система управления электрогидравлическим манипулятором | 1987 |
|
SU1439296A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
