Изобретение относится к робототехнике и может быть использовано пр создании электрогидравлических манипуляторов.
Цель изобретения - упрощение конструкции и повышение надежности системы.
На чертеже представлена функциональная схема системы управления электрогидравлическим манипулятором.
Система управления содержит регу- лятор 1 давпения, комплекс приводов, каждый из которых состоит из блока 2 управления, электрогйдранлического усилителя 3, гидродбигателя 4 и датчка 5 положения, блок 6 выбора давления питания и датчик. 7 давления.
Система управления электрогидравлическим манипулятором работает еле- дующим образом. ;
Сигналы управления на приводы g. от задающего или вычислительного устройства (не показано) поступают на блоки -2 управления, где происходит их сравнение с сигналами датчиков 5 положения, установленных на вьхходных валах гидродвигателей А, и вьщеление ошибки привода. Сигнал ошибки, усиленный в блоке 2 управле- ния, является управляющим для электр 1 идравлического усилителя 3 и поступает на его вход. Сигнал с выхода усилителя 3 вызывает перемещение выходного вала гидродвигателя Аи, как следствие, изменение сигнала с датчика 5 положения до тех пор, пока он не сравняется с сигналом управления . Таким образом, происходит отработка управляющего воздейст- ВИЯ в замкнутом по положению электрогидравлическом следящем приводеi Одновременно с этим происходит настройка давления в единой системе гидропитания. Поскольку электрогид- равлические усилители 3 охвачены внутренней, обратной связью по перепаду давлений, то их входной сигнал соответствует определенной нагрузке на привод. Входные сигналы с каждого усилителя 3 поступают на блок 6 выбора давления питания, где вырабатывается управляющее воздействие для регулятора 1 давления, по которому выставляется давление питания в сие- теме.
Вместе с тем, сигнал с датчика 7 давления, установленного на выходе
регулятора 1 давления, поступает в блоки 2 управления каждого привода, где по нему происходит настройка коэффициентов усиления, соответствующих текущему давлению питания в системе.
Блок 2 управления может содержать последовательно соединенные сумматор для выделения сигнала ошибки в приводе и операционный усилитель с переменным коэффициентом усиления, изменяющимся по сигналу с датчика 7 давления
Блок 6 выбора Давления питания (в простейшем случае) состоит из блока выделения модуля и устройства выбора максимального сигнала, что позволяет настраивать давление в системе по наиболее нагруженному приводу.
Применение электрогидравлического усилителя с внутренней обратной связью в предлагаемой системе, позволяет избавиться от датчиков давления, установленных в полостях гидродвигателей, и, тем самым, резко упростить электрическую или гидравлическую коммутацию, что особенно важно для электрогидравлических манипуляторов со сложной кинематикой. Ресурс работы системы за счет упрощения конструкции повышается в 1,5-2 раза.
Формула, изобретения
Система управления электрогидравлическим манипулятором, состоящая из регулятора давления, электрогидравлических следящих приводов, каждый из которых содержит последовательно соединенные блок управления, электрогидравлический усилитель с обратной связью по перепаду давления, подключенный питающей магистргшью к выходу регулятора давления, и гидродвигатель, на выходном валу которого установлен датчик положения, связанный с входом блока управления, блок выбора давления питания, соединенный своим выходом с входом регулятора давления, а также датчик давления, установленный на выходе регулятора давления и подключенный своим выходом к блоку управления каждого отдельного привода, отличающаяся тем, что, с целью упрощения конструкции и повыи ения надежности системы, входы электрогидравличес- ких усилителей соединены с входами блока выбора давления питания.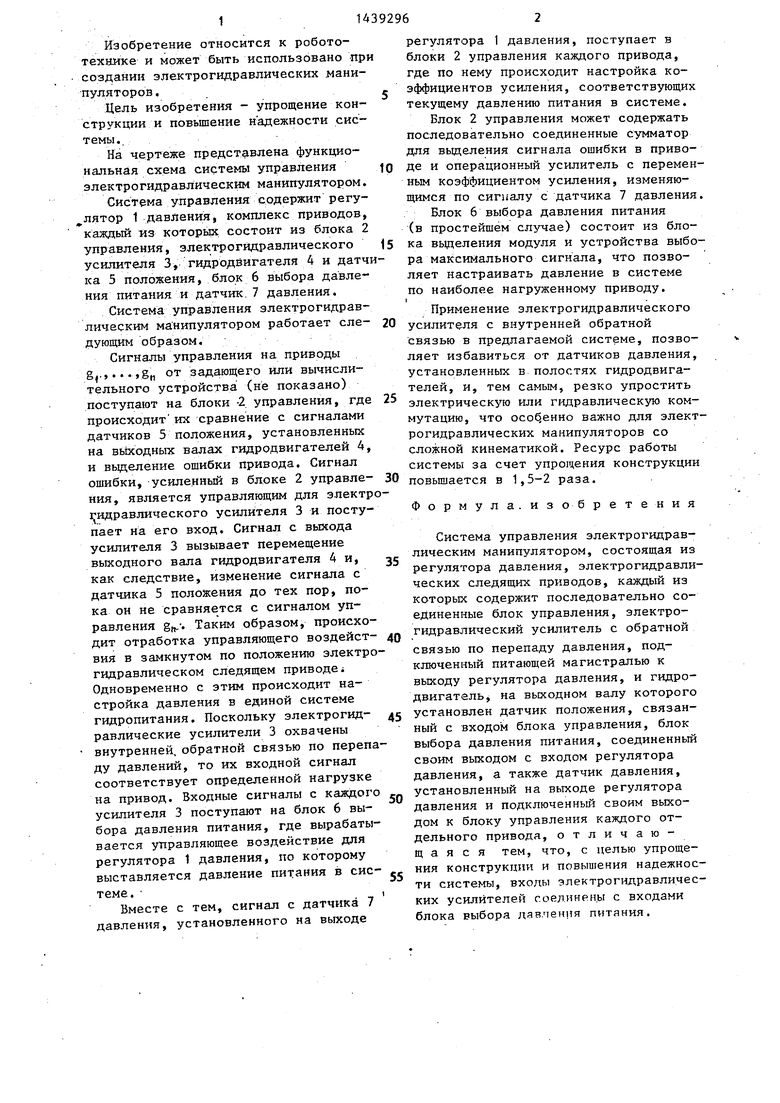
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления комплексом электрогидравлических следящих приводов, расположенных на подвижном основании | 1990 |
|
SU1740805A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Система управления электрогидравлическим манипулятором | 1977 |
|
SU714348A1 |
| Диагностируемый электрогидравлический силовой следящий привод | 1987 |
|
SU1539729A1 |
| Электрогидравлический следящий привод | 1980 |
|
SU941701A1 |
| Следящая система двустороннего действия | 1985 |
|
SU1296404A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Следящий гидропривод дроссельного регулирования | 1974 |
|
SU585320A1 |
) Изобретение отиосится к робототехнике. и мдакет быть использовано при создании электрогйдравлических Манипуляторов. Цель изобретения упрощение конструкции и повьшепие над еяйости системы. В системе вз«оды электрогийравлическоГо усилителя 3 с внутренней обратной свяиью соеднне- ны с вxoдa m блока б выбора дзсвления питания. В схеме упрощена электрическая и гидравлическая коммутация. Ресурс .работы системы за счет упрощения кЪйструКции повьшает.ся в 1,5- 2 раза, f ил. CS 5S
| Петросяя Л.Г., Чельше В.А | |||
| , Вопросы проектирования пройьшшенных , роботов с телескопическими степе11ями подвижности | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
