Изобретение относится к неразрушающему контролю и является способом магнитной дефектоскопии, позволяющим выявить разноориентированные дефекты в движущихся цилиндрических изделиях.
Известен способ магнитной дефектоскопии, который заключается в поочередном намагничивании объекта контроля (ОК)
в двух взаимно перпендикулярных направлениях двумя намагничивающими устройст-„ вами (НУ). Цилиндрическое изделие (труба) намагничивается в продольном направлении соленоидом, в поперечном - П-образ- ным приставным магнитом или пропусканием тока центральному проводу или телу трубы. Такое намагничивание изделия позволяет выявить разноориентирован- ные дефекты.
Недостатком является сложность конструкции намагничивающих устройств.
Известен способ магнитной дефектоскопии, в котором ОК поочередно многократно намагничивают в разных направлениях, которые дискретно изменяются. Такое намагничивание достигается, например, кресто- образным магнитом и также позволяет выявить разноориентированные дефекты.
Недостатком способа является различная чувствительность к одинаковым дефектам, если магниточувствительный датчик расположен не в месте пересечения магнитных потоков (от двух П-образных магнитов), что имеет место при многоэлементном (строчном или матричном) датчике.
Известен способ магнитной дефектоскопии, в котором намагничивание изделия: осуществляют с непрерывным изменением направления магнитного поля. Непрерывное вращение векторов магнитного поля на 360° достигается, например, пропусканием синусоидальных токов, сдвинутых по фазе на 90°, по двум взаимно перпендикулярным катушкам. Результирующий вектор магнитного поля изменяет свое направление в пределах 90°, если по одной из двух перпендикулярных катушек пропускается постоянный ток, а по второй - синусоидальный. Вращение вектора магнитного поля может достигаться также изменением угла между двумя катушками, по которым пропускают трехфазный синусоидальный ток.
Недостатком таких способов является снижение чувствительности к подповерхностным дефектам, что связано с наличием вихревых токов в трубе, появление которых объясняется применением переменных токов в катушках.
Выявлять разноориентированные дефекты позволяет способ магнитной дефектоскопии, при котором продольные дефекты выявляются в остаточном магнит-ном поле, а поперечные - в продольном приложенном поле.
Недостатком способа является разная чувствительность к дефектам.
Для контроля небольших изделий известен способ магнитной дефектоскопии, при котором используется система из двух П-образных магнитов, расположенных с разных сторон ОК.
Наиболее близким к предлагаемому является способ магнитной дефектоскопии для выявления разноориентированкых дефектов в движущихся цилиндрических изделиях, заключающийся в том, что изделие поступательно перемещают относительно
намагничивающей системы, изменяют направление намагничивающего поля и выявляют дефекты с помощью системы магниточувствительных преобразователей.
По периметру трубы между полюсами
полюсных НУ размещены четыре строчных магниточувствительных преобразователя. В области расположения преобразователей действуют два магнитных поля: продольное,
созданное соленоидами, и поперечное, созданное одним из полюсных НУ (если считать, что магнитное поле, созданное вторым полюсным НУ, не влияет на поле в области расположения первого полюсного НУ). При
наложении двух магнитных полей создается результирующее магнитное поле, вектор которого, непрерывно изменяя направление, совершает периодические колебания относительно вектора постоянного магнитного
поля, созданного приставным НУ.
К недостаткам известного способа можно отнести изменение величины намагничивающего поля в зависимости от направления, что приводит к изменению чувствительности к
дефектам и, как следствие, к снижению точности, а также возникновение в трубе вихревых токов, которые ограничивают проникновение магнитного поля внутрь трубы и, как следствие, чувствительность к подповерхностным дефектам, Кроме того, громоздкость системы намагничивания затрудняет его использование, особенно для труб большого диаметра.
Цель изобретения - повышение чувствительности к разноориентированным подповерхностным дефектам и точности контроля.
Согласно способу магнитной дефектоскопии для выявления разноориентирован- ных дефектов в движущихся цилиндрических
изделиях, заключающемуся в том, что изделие поступательно перемещают относительно намагничивающей системы, изменяют направление намагничивающего поля и выявляют дефекты с помощью системы магниточувствительных преобразователей, намагничивание выполняют соленоидом, питаемым постоянным током, основание которого образует с продольной осью контролируемого изделия угол а, лежащий в
интервале 0;90, а магкиточувствительные преобразователи располагают по периметру соленоида, между ним и поверхностью контролируемого изделия, которое приводят во вращение относительно продольной оси, а
скорость вращения выбирают из условия равенства угла подьема винтовой траектории точек поверхности изделия углу а. Вращение вектора магнитного поля осуществляется за счет вращения цилиндрического изделия
внутри наклонного соленоида или вследствие винтового движения относительно наклонного намагничивающего соленоида.
Вектор магнитного поля, созданного проводником с током, перпендикулярен к направлению проводника (тока). Следовательно, магнитное поле в каждой точке контролируемого цилиндрического изделия перпендикулярно тому участку соленоида (точнее току в соленоиде), который примыкает к этой точке изделия. В разных точках участки наклонного соленоида образуют разные углы с продольной осью трубопровода, поэтому разные углы с продольной осью имеет и вектор магнитного поля в теле трубы (цилиндрического изделия). Кроме того, при вращении или винтовом движении изделия за счет наклона соленоида вектор магнитного поля в каждой точке изделия вращается.
На фиг. 1 приведено намагничивающее устройство для осуществления способа магнитной дефектоскопии, общий вид, и система датчиков; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид с торца: на фиг. 4-6 - контролируемая труба в развернутом виде для случая, когда труба условно разрезана вдоль нижней линии на фиг. 2 и развернута (выпрямлена) в плоскость (верхняя продольная линия фиг. 2 показана в виде штрихпун- ктирной линии), разделяющую развертку трубы на две симметричные части, а также направление векторов магнитного поля в теле трубы для точек, расположенных под соленоидом (фиг. 4) выбор ширины зоны контроля, в которой обеспечивается поворот вектора магнитного поля на угол, близкий к 90° (фиг. 5) и зона контроля при винтовом движении цилиндрического изделия - трубы (фиг. 6); на фиг 7 - контролируемая труба в развернутом виде при меньшей скорости линейного перемещения; на фиг. 8 - векторы намагничивания.
Цилиндрическое изделие (труба) 1 движется поступательно со скоростью V и вращается с угловой скоростью о) (фиг. 1) на него накладывается наклонно соленоид 2. Плотность соленоида 2 образует с вертикалью угол а (фиг. 2). Между поверхностью трубы и соленоидом по периметру трубы располагаются магниточувствительные датчики 3 (фиг. 3).
Способ магнитной дефектоскопии для выявления разноориентированных дефектов в движущихся цилиндрических изделиях осуществляется следующим образом.
По обмотке соленоида 2 протекает постоянный ток, который создает в теле трубы 1 постоянное магнитное поле. Направление
силовых линий этого поля показано (фиг. 2) пунктирными линиями. Вектор магнитного поля, созданного током в проводнике, перпендикулярен к направлению проводника с
током. Следовательно, магнитное поле в теле контролируемой трубы 1 в точках, расположенных под соленоидом 2, перпендикулярно соответствующим участком соленоида. В точках трубы, удаленных от наклонного соленоида, силовые линии направлены вдоль трубы, как и при намагничивании обычным вертикальным соленоидом. Поэтому силовые линии в теле трубы имеют изогнутую форму (фиг. 2).
Так как магниточувствительные датчики
3размещены между поверхностью трубы 1 и наклонным соленоидом 2, то для оценки выявляемости дефектов достаточно рассмотреть магнитное поле в точках изделия,
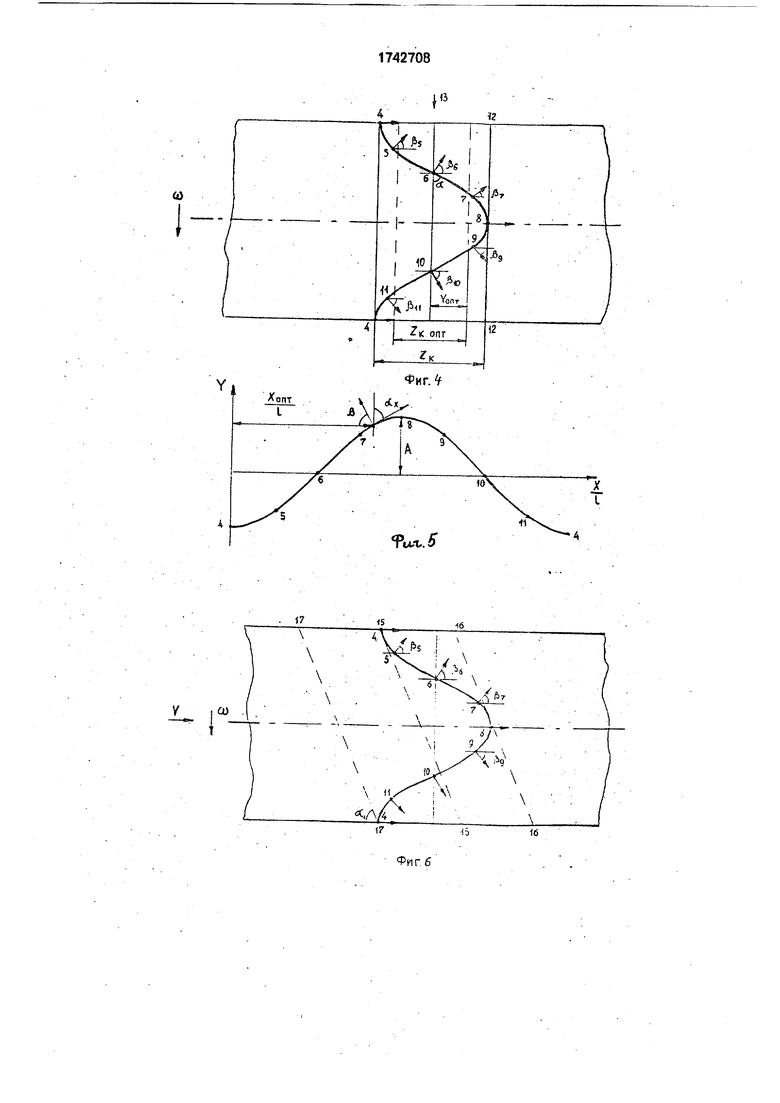
расположенных по периметру непосредственно под соленоидом. Рассмотрим магнитное поле в нескольких характерных точках 4-11 (фиг. 3) этого периметра. Разрежем трубу вдоль по нижней линии (фиг. 2) и развернем ее в плоскость. Это позволяет от объемного изображения перейти к изображению на плоскости. Линия периметру трубы под наклонным соленоидом принимает при этом вид синусоиды 4-5-6-7-8-9-10-11-4
(фиг, 4). Направление вектора магнитного поля в точках 4-11 показано (фиг. 4) стрелками, перпендикулярными синусоиде в соответствующих точках. Направление вектора намагничивающего поля в разных точках
разное (фиг. 4). Обозначим через /3 угол, который вектор намагничивающего поля образует с продольной остью трубы. В точках
4и 8 значение р 0. В точках 6 и 10, расположенных на оси, относительно которой повернтут на угол а наклонный соленоид, синусоида пересекает прямую 6-10 под углом а . При этом векторы магнитного поля образуют с продольной осью трубы наибольший угол /fe -о. . В промежуточных точках синусоиды, расположенных между точками 4 и 6 (например, точка 5), 6 и 8 (точка 7), 8 и 10 (точка 9), 10 и 4 (точка 11), значение угла {3 в интервале между /3 0 и (фиг. 4).
в процессе проведения магнитной дефектоскопии труба 1 перемещается относительно намагничивающего наклонного соленоида 2 с датчиками 3. Взаимные перемещения могут быть разных видов. Например, труба 1 вращается внутри«еподвижного наклонного соленоида. В этом случае часть контролируемой трубы, изображенная в виде полосы (фиг. 4) ограниченной слева прямой 4-4 и справа прямой 12-12, перемещается
относительно датчиков 3 в направлении, обозначенном стрелкой 13. В процессе движения дефекты выявляются в тех точках контролируемой трубы, которые находятся в зоне 4-5-6-7-8-9-10-11-4 расположения дат- чиков. Назовем эту зону зоной контроля. .Обозначим ее ширину через Zk (фиг. 4).
Каждая точка контролируемой полосы за один оборот попадает в зону контроля дважды: один раз это происходит в верхней половине синусоиды 4-5-6-7-8 и второй раз в нижней половине синусоиды 8-9-10-11-4 (фиг. 4). Вектор магнитного поля для точек первой части зоны контроля (точки 4-8 кривой) повернут относительно продольной оси на угол против часовой стрелки, где /31 равно 0, /fe,6., 0 для точек 4-8 соответственно, а для точек второй части зоны контроля (точки 8-11 и 4 кривой) - на угол по часовой стрелке, где /Зн равно 0,/39,/Зю,
0для точек 8-11 и 4 соответственно. Причем для точек, симметричных относительно оси, показанной штрихпунктирной линией (фиг. 4), выполняется равенство fi /8ц.
Таким образом, при переходе из первой зоны контроля во вторую вследствие вращения изделия вектор магнитного поля поворачивается на угол у 2/5 . Наименьшее значение угла поворота у О для границ 4-4 и 12-12 контролируемой зоны (полосы), наи- большее значение у макс- 2а для точек, расположенных на прямой (периметре трубы) 6-10. Таким образом, для всех точек контролируемой области трубы, кроме граничных линия 4-4 и 12-12, аектор магнит- - ного поля при переходе из первой зоны контроля во вторую изменяет свое направление, чем создаются предпосылки для выявления разноориентированных дефектов. Оптимальным с точки зрения выявления разноориенти- розанных дефектов является поворот вектора намагничивающего поля на угол, равный 90°. Изобразим синусоиду 4-5-6-7-8-9-10-1112-4 (фиг. 4) в координатах у, Y (фиг. 5), где
1 2 лЯ - периметр трубы; R - ее радиус. Уравнение этой синусоиду
А . , 2лх тгл Asin( -2) -
сое (1)
где х 0...2 лЯ;
А - амплитуда синусоиды, равная половине ширины зоны контроля.
Тангенс угла, который образует касательная
U
к кривой (1) в некоторой точке у с положительным направлением действител ьной оси,
равен первой производной tg «x Y1, откуда
ах arctg ( sin Ј ) arctg (tg a slnЈ ).
Из фиг. 5 видно, что а / как углы между двумя взаимно перпендикулярными прямыми. При этом угол поворота у вектора намагничивающего поля в общем случае
у 2/8 2arctg(tgasfnЈ). (2)
По уравнениям (1) и (2) для каждого угла а 45° наклона соленоида 2 можно найти такое оптимальное значение параметра х Хопт и Y Yorn, а следовательно, и такую оптимальную ширину зоны контроля ZK Yom, для которой для всех точек зоны контроля соблюдается условие с заданной степенью точности, И наоборот, при заданной (требуемой) ширине зоны контроля ZKQHT по уравнениям (1) и (2) можно найти такой угол а наклона соленоида, что для всех точек зоны контроля выполняется условие у «90°.
Например, требуется найти ширину зоны контроля, при которой угол у равен 90° с точностью Дк ±5 . Максимальный угол Умакс 2« 95 . Следовательно, угол наклона соленоида следует принять « Хмакс/2 47,5°. Минимальный угол у 85° по краям зоны контроля Из уравнений (1) и (2), подставляя у получают
85° и учитывая, что А Rtga,
Y Rtg a cos arcsin (tg Ј / tga ) Rtg47,5° cos arcsin 0,59 R.
Контролируемая полоса шириной ZKOHT 2Y0riT 1,18R показана пунктиром (фиг, 4).
Рассмотрим случай, когда контролируемая труба совершает винтовое движение, т.е. когда одновременно с вращением со скоростью л труба движется поступательно со скоростью V (фиг. 6). В этом случае контролируемая полоса на развернутом изображении трубы наклоняется на угол а н, который зависит от соотношения скоростей и диаметра (радиуса R) контролируемой трубы, и ограничена наклонными граничными линиями. Если за время одного оборота труба перемещается поступательно на расстояние AI, то угол наклона aH arctg() Полоса
(фиг. 6) охватываемая первой зоной контроля (4-8), при принятом направлении вращения ограничена наклонными прямыми 15-15 слева и 16-16 справа, а полоса, охватываемая второй зоной контроля (второй половиной синусоиды 8-9-10-11-4) ограничена прямой 17-17 слева и 16-16справа. При этом полоса, ограниченная слева прямой 17-17 и справа прямой 15-15, попадает только в одну (вторую) зону контроля и для нее не имеет места поворот вектора магнитного поля. Поэтому рассмотрим только полосу между прямыми 15-15 и 16-16, которая проходит через обе зоны контроля. Для этой полосы при винтовом движении трубы для всех точек, кроме крайней справа, имеет место поворот вектора магнитного поля при переходе из первой зоны контроля во вторую,
Аналогично случаю с чисто вращательным движением контролируемой трубы может быть поставлена и решена задача определения такой ширины контролируемой полосы, при которой вектор намагничивающего поля при переходе из первой зоны контроля во вторую поворачивается на угол, близкий к 90°, с заданной степенью точности.
Намагничивание контролируемого изделия в зоне контроля может быть как дискретным, так и непрерывным. Дискретное намагничивание в двух направлениях имеет место при вращательном движении изделия (фиг. 4), а также при винтовом, когда путь, пройденный изделием поступательно за время одного оборота, равен ширине зоны контроля (фиг. 6).
Если этот путь меньше ширины зоны контроля, что имеет место при снижении скорости поступательного движения (или при увеличении скорости вращения), то число дискретных направлений намагничивания возрастает. При этом чем меньше скорость поступательного движения, тем больше дискретных направлений намагничивания. В пределе при достаточно малой скорости линейного перемещения намагничивание изделия становится непрерывным.
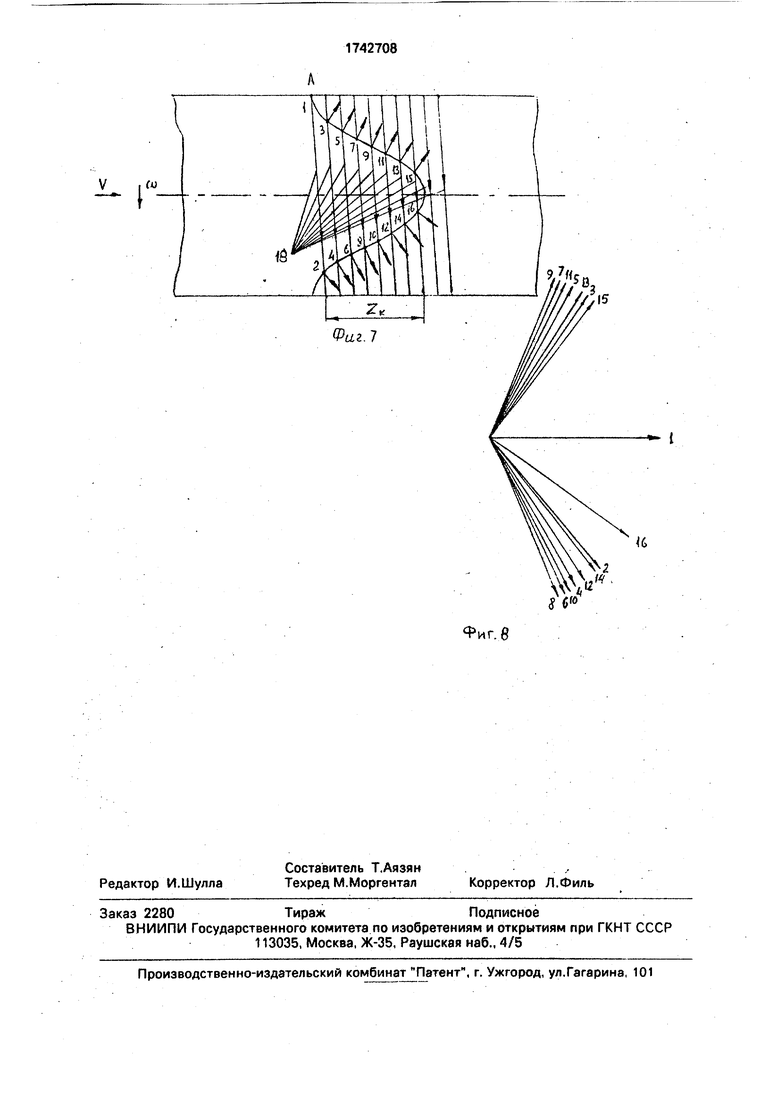
На фиг. 7 по аналогии с фиг. 6 показана контролируемая труба в развернутом виде, но при меньшей скорости линейного перемещения. Линиями 18 (фиг. 7) показана траектория перемещения точки А трубы при ее винтовом движении из начального положения. Направление перемещения точки показано стрелками на линиям 18. Рассматриваемая точка трубы находится в зоне контроля в течение нескольких оборотов (фиг. 7). За каждый оборот исследуемая точка попадает под намагничивающий соленоид дважды; за первый оборот в точках 1 и
2, за второй оборот в точках 3 и 4 и т.д. В каждой из точек 1-16 вектор магнитного поля перпендикулярен синусоиде. Направление вектора намагничивания показано в 5 этих точках стрелками. При этом вектор намагничивания от точки к точке изменяет свое направление. На фиг. 8 эти векторы намагничивая изображены исходящими из одной точки. Пучок этих векторов ограничен
0 углом 1а , где а - угол наклона соленоида. Внутри этого угла вектор намагничивания вращается (поворачивается), принимая несколько дискретных значений.
Обозначим число оборотов, в течение
5 которых исследуемая точка находится в зоне контроля, через п.Тогда число попаданий этой точки под соленоид 2 п и, следовательно, на фиг. 7 и 8 2 п различных направлений вектора намагничивания. Чем меньше ско0 рость линейного перемещения, тем больше п. В пределе при осуществляется непрерывное изменение вектора магнитного поля и его измерение.
Таким образом, способ намагничивания
5 цилиндрического изделия наклонным соленоидом обеспечивает как дискретное,так и непрерывное намагничивание изделий раз- нооринтированным магнитным полем. Сочетание такого способа намагничивания с
0 системой магниточувств.ительных преобразователей, расположенных по периметру контролируемого изделия, между поверхностью контролируемого изделия и наклонным соленоидом, представляет собой
5 способ магнитной дефектоскопии, который обеспечивает выявление разноориентиро- ванных дефектов в контролируемом изделии при его перемещении относительно наклонного соленоида.
0 При таком перемещении в постоянном магнитном поле наводимые в изделии вихревые токи значительно меньше, чем при вращении вектора магнитного поля при известном способе при наложении перемен5 ного магнитного поля на постоянное, что повышает глубину проникновения магнитного поля, а следовательно, и чувствительность к дефектам. Кроме того, при наложении переменного магнитного поля
0 на перпендикулярное ему постоянное при повороте результирующего вектора изменяется его величина, что приводит к изменению величины намагничивающего поля и, как следствие, снижению точности. После
5 наклонного соленоида одинаково по величине во всех точках периметра цилиндрического изделия, расположенных под соленоидом, это по сравнению с известным
способом повышает точность выявления дефектов.
Использование способа магнитной дефектоскопии, позволяет повысить чувствительность к подповерхностным дефектам за счет снижения вихревых токов, повысить точность выявления дефектов за счет сохранения неизменной величины магнитного поля независимо от его ориентации.
Формула изобретения
Способ магнитной дефектоскопии для выявления раэноориентированных дефектов в движущихся цилиндрических изделиях, заключающийся в том. что изделие поступательно перемещают относительно намагничивающей системы, изменяют на0
правление намагничивающего поля и выявляют дефекты с помощью системы магнито- чувствительных преобразователей, о т л и ч а ю щ и и с я тем, что, с целью повышения чувствительности к разноориентированным подповерхностным дефектам и точности контроля, намагничивание выполняют соленоидом, питаемым постоянным током, основание которого образуете продольной осью контролируемого изделия угол а. лежащий в интервале 0;90, а магниточувствительные преобразователи располагают по периметру соленоида, между ним и поверхностью контролируемого изделия, которое приводят во вращение относительно продольной оси, а скорость вращения выбирают из условия равенства угла подъема винтовой траектории точек поверхности изделия углу а .




| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ МАГНИТНОГО ДЕФЕКТОСКОПА ПРОТЯЖЕННОГО ИЗДЕЛИЯ СЛОЖНОЙ ФОРМЫ | 2016 |
|
RU2645830C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОЙ ДЕФЕКТОСКОПИИ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЭТОГО | 2018 |
|
RU2670194C1 |
| Магнитнотелевизионный дефектоскоп | 1987 |
|
SU1499205A1 |
| Устройство электромагнитно-акустического контроля рельсов | 2017 |
|
RU2653663C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ | 2014 |
|
RU2566418C1 |
| Устройство намагничивания для средств неразрушающего контроля длинномерных изделий | 2019 |
|
RU2702809C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОЙ МАГНИТНОЙ ДЕФЕКТОСКОПИИ СТЕНОК СТАЛЬНЫХ ТРУБОПРОВОДОВ | 1993 |
|
RU2102737C1 |
| Магнитотелевизионный дефектоскоп | 1987 |
|
SU1460692A2 |
| УСТРОЙСТВО ДЛЯ ВИХРЕТОКО-МАГНИТНОЙ ДЕФЕКТОСКОПИИ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2014 |
|
RU2566416C1 |
Способ магнитной дефектоскопии для выявления разноориентиро.ванных дефектов в движущихся цилиндрических объектах. Изобретение относится к неразрушающему контролю и является способом магнитной дефектоскопии, позволяющим выявлять разно- ориентированные дефекты в движущихся цилиндрических объектах. Цель изобретения - повышение чувствительности к разноориентиро- ванным подповерхностным дефектам, повышение точности контроля, достигается за счет того, что цилиндрическое изделие поступательно перемешают относительно намагничивающей системы, изменяют направление намагничивающего поля и выявляют дефекты с помощью магнито- чувствительных преобразователей. Намагничивание выполняют соленоидом, питаемым постоянным током, основание которого образует с продольной осью контролируемого изделия угол а, лежащий в интервале Р;90. Магниточувстви- тельные преобразователи располагают по периметру соленоида, между ними и поверхностью контролируемого изделия, которое приводят во вращение относительно продольной оси. 8 ил. г Ё VI Jb ю VI О 00
5 Фи.1
Фиг. 2
Фиг.З
в
л -I
У
15
U
Фиг. 8
