Изобретение относится к промышленной робототехнике и предназначено для механизациииавтоматизациизагрузки-выгрузки деталей в металлорежущих станках.
Цель изобретения - упрощение конструкции и повышение ее надежности.
На чертеже изображен кистевой узел манипулятора с захватным рабочим органом, общий вид.
Кистевой узел манипулятора содержит основание 1, привод 2, винтовую передачу с винтом 3 и гайкой 4, головку 5, двухсватный рабочий орган, каждый из схватов которого имеет по меньшей мере два пальца 6 и 7, 8 и 9. В состав устройства включен также фиксатор, который выполнен в виде подпружиненного с помощью пружины 10 стержня 11, связанного с тягой 12, являющейся якорем электромагнита 13. Фиксатор установлен между основанием 1 и головкой 5. В основании 1 установлена головка 5, имеющая возможность вращения вокруг своей продольной оси, и привод 2 вращения. Устройство снабжено дополнительной гайкой 14, образующей с винтом 3 передачу, а также винтом 15, образующим с гайками 16 и 17 передачу. Имеется зубчатая передача с одним ведущим 18 и двумя ведомыми 19 и 20 зубчатыми колесами. Передача установлена в головке 5 с помощью подшипников 21-26. В головке 5 также установлены четыре электромагнитные муфты 27-30, и с помощью подшипников 31-34 - винты 3 и 15. Винты 3 и 15 через электромагнитные муфты 27 и 30 одним концом связаны с ведомыми зубчатыми колесами 19 и 20, а соответствующим другим концом - с корпусом головки 5. Выходной вал привода 2 кинематически связан с осью ведущего 18 зубчатого колеса. Каждая винтовая передача выполнена в виде двух гаек 4, 14 и 16, 17 и одного вала 3 и 15 соответственно. На винтах 3 и 15 нарезаны левосторонняя и правосторонняя винтовые поверхности для перемещения соответствующих гаек 4, 17 и 14, 16. Каждая гайка 4, 14, 16 и 17 жестко связана с одним из соответствующих пальцев 6-9 двухсхватного рабочего органа.
Кистевой узел манипулятора снабжен шестью конечными выключателями 35-40: первый 35 установлен на пальце 6, второй
сл
с
VJ
4 GJ 00 СП О
36 - на пальце 7, третий 37 - на пальце 8, четвертый 38 - на пальце 9, пятый 39 и шестой 40, взаимодействующие с выступом 41 головки 5, установлены на основании 1. Основание 1 и головка 5 соединены с помощью шариков 42, причем основание 1 и головка 5 в этом случае служат соответственно обоймой и втулкой подшипникового соединения, имеющих возможность вращения вокруг своей продольной оси. Фиксатор установлен между основанием 1 и головкой 5, при этом для обеспечения фиксации стержня 11 на наружной поверхности головки 5 выполнены углубления 43.
Кистевой узел манипулятора работает следующим образом.
В исходном положении привод 2 отключен, пальцы 6 и 7, 8 и 9 находятся в полностью разведенном состоянии. Головка 5 воздействует на конечные выключатели 36 и 37, подтверждая исходное состояние пальцев 6, 7, 8 и 9 обоих схватов. Муфты 27-30 отключены. Стержень 11 фиксатора входит в углубление 43, фиксируя головку 5 относительно основания 1. Кистевой узел может устанавливаться на манипуляторе, предназначенном для загрузки и разгрузки токарных станков. В исходном состоянии заготовки устанавливаются в кассете, причем центральная ось заготовок расположена вертикально (не показано).
Манипулятор перемещает кистевой узел к кассете, при этом пальцы 6 и 7 первого схвата подводятся к заготовке, предназначенной для захватывания.
Система управления манипулятора (не показана) подает одновременно питание на привод 2 и на электромагнитную муфту 27. Вал привода 2 начинает вращаться против часовой стрелки, сообщая вращение жестко связанному с ним ведущему зубчатому колесу 18, которое приводит в движение ведомые зубчатые колеса 19 и 20, Вал ведомого зубчатого колеса 19 через включенную электромагнитную муфту 27 передает вращение закрепленному на его продольной оси винту 3, имеющему участки с правосторонней и левосторонней винтовыми поверхностями, При этом гайки 4 и 14, находящиеся на винте 3 в крайних положениях, будут сходиться. Жестко связанные с гайками 4 и 14 пальцы 6 и 7 сближаются, зажимая заготовку. Обеспечив создание первым схватом требуемого сжимающего усилия, система управления манипулятора отключает привод 2 и электромагнитную муфту 27, одновременно подавая питание на тормозную электромагнитную муфту 28. При этом обеспечивается надежное удержание заготовки и фиксация первого схвата относительно головки 5. Затем манипулятор перемещает кистевой узел с заготовкой к токарному станку, а второй схват с пальцами 8 и 9 - к обработанной на станке детали таким образом, чтобы продольная ось детали была перпендикулярна продольной оси кистевого узла. Патрон станка отпускает деталь и одновременно подается питание на привод 2 и на электромагнитную муфту 30. Вал при0 вода 2 через зубчатую передачу с колесами 18 и 20, а также через электромагнитную муфту 30 передает вращение винту 15, имеющему правостороннюю и левостороннюю винтовые поверхности. При этом гайки 16 и
5 17, находящиеся на винте 15 в крайних положениях, будут сходиться. Жестко связанные с гайками 16 и 17 пальцы 8 и 9 сходятся, зажимая готовую деталь. Обеспечив создание вторым схватом требуемого сжимающе0 го усилия, система управления манипулятора отключает привод 2 и электромагнитную муфту 30, одновременно подавая питание на тормозную электромагнитную муфту 29. При этом обес5 печивается надежное удержание детали и фиксация второго схвата относительно головки 5. Манипулятор отводит деталь от патрона токарного станка, а кистевой узел осуществляет поворот головки 5 относи0 тельно основания 1 на 180, что достигается одновременным включением приводом 2 электромагнитных муфт 27 и 30 и электромагнита 13 фиксатора, который обеспечивает выход стержня 11 из первого углубления 43. Головка 5 пястоомаживается по отношению коснованию 1 и поддействием привода 2 вращается против часовой стрелки. Когда головка 5 повернется на 1801, выступ 41 воздействует на конечный выключатель 39,
0 и питание отключается от привода 2, от электромагнитных муфт 27 и 30 и от обмотки электромагнита 13 фиксатора. При этом головка 5 фиксируется относительно основания 1, поскольку стержень 11 фиксатора
5 входит во второе углубление 43 в головке 5. Затем манипулятор вводит заготовку в патрон токарного станка. После зажатия заготовки в патроне токарного станка система управления манипулятора снимает питание
0 с тормозной электромагнитной муфты 28, подает питание на электромагнитную муфту 27 и на привод 2, обеспечивая вращение его вала по часовой стрелке. При этом гайки 4 и 14 и пальцы 6и7 первого схвата расходятся,
5 освобождая заготовку. После срабатывания конечного выключателя 36 обесточиваются электромагнитная муфта 27 и привод 2.
Далее манипулятор перемещает кистевой узел с деталью к накопителю (не показан) обработанных деталей. При отпускании
детали система управления манипулятора снимает питание с тормозной электромагнитной муфты 29 и подает питание на электромагнитную муфту 30 и на привод 2, обеспечивая вращение его вала по часовой стрелке, что приводит к расжатию пальцев 8 и 9. При срабатывании конечного выключателя 37 снимается питание с электромагнитной муфты 30 и привода 2. Кистевой узел при этом переводится в исходное состоя- ние. Кистевой узел манипулятора может обеспечить захват заготовки первым схва- том, а детали - вторым, и наоборот. При этом система управления обеспечивает соответствующую очередность подачи пита- ния к электромагнитным муфтам 27-30.
Конечные выключатели 35 и 38 служат для получения информации (воздействия на привод 2, электромагнитные муфты 27 и 30 соответственно) в случае, если детали не окажутся в зоне захватывания.
Формула изобретения Кистевой узел манипулятора, содержащий основание, расположенные на нем привод и головку, основную винтовую передачу, смонтированную в этой головке, двух- сватный рабочий орган, каждый из схватов которого имеет по меньшей мере два пальца и фиксатор, установленный между основанием и головкой, имеющей возможность вращения вокруг своей продольной оси, о т- личающийся тем, что, с целью упрощения конструкции и повышения ее надежности, устройство снабжено четырьмя электромагнитными муфтами, дополнительной винтовой передачей и зубчатой передачей, установленными в головке, причем последняя имеет одно ведущее и два ведомых зубчатых колеса, а винт каждой винтовой передачи связан через электромагнитные муфты одним концом с соответствующим ведомым зубчатым колесом, а другим - с корпусом головки, выходной вал привода кинематически связан с ведущим зубчатым колесом, при этом в каждой винтовой передаче имеются две гайки, а винты имеют участки с левосторонней и правосторонней винтовыми поверхностями, сопряженными с соответствующими гайками, кроме того, каждая гайка жестко связана с одним из пальцев.
. у .
Y7///t//,4//, ////, / / Л
41 21 15 I
1
V 1сц-
ПЫЗ
il inil 7цш.
40
-11
- w
12 13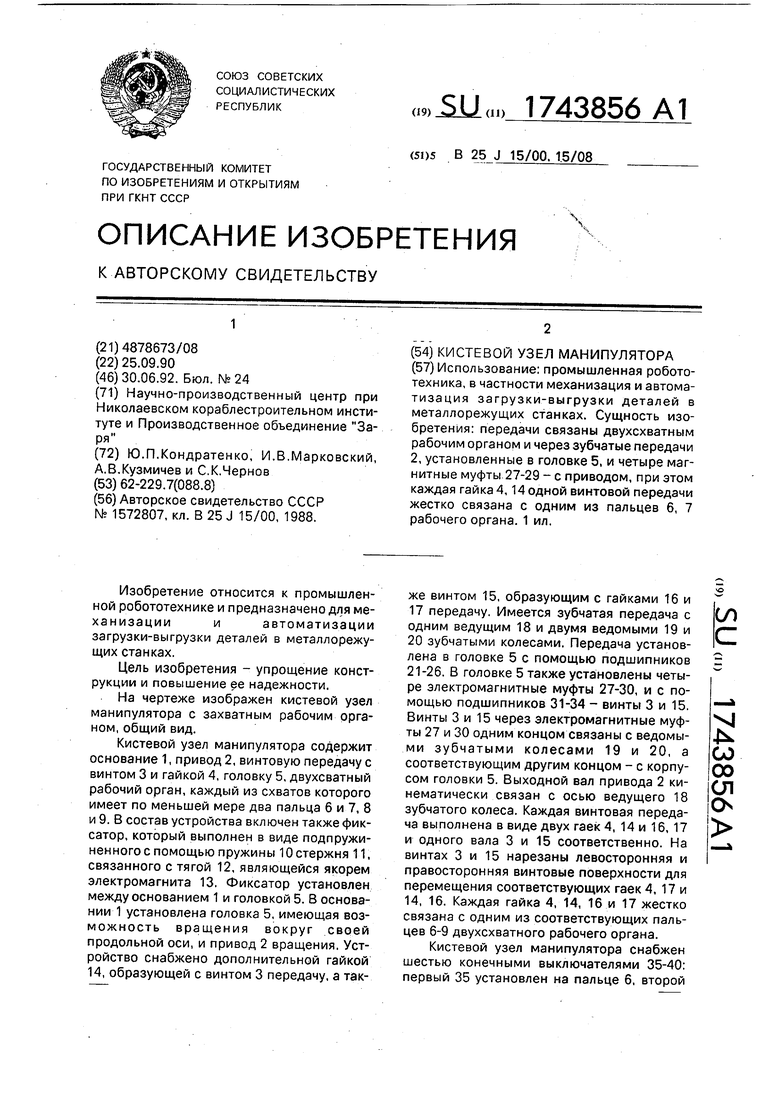


| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| СТАНОК ДЛЯ ОБТОЧКИ КОЛЕСНЫХ ПАР БЕЗ ВЫКАТКИ ДЛЯ ВОССТАНОВЛЕНИЯ ПРОФИЛЯ БАНДАЖА ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 1996 |
|
RU2107586C1 |
| Зажимное устройство для токарного станка | 1983 |
|
SU1127696A1 |
| Устройство для управления перемещением кулачков токарного патрона | 1987 |
|
SU1424986A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| МНОГОРЕЗЦОВЫЙ ТОКАРНЫЙ АВТОМАТ | 1992 |
|
RU2087302C1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| Установка для автоматической штамповки | 1985 |
|
SU1238980A1 |

Использование: промышленная робототехника, в частности механизация и автома- тизация загрузки-выгрузки деталей в металлорежущих станках. Сущность изобретения: передачи связаны двухсхватным рабочим органом и через зубчатые передачи 2, установленные в головке 5, и четыре магнитные муфты 27-29 - с приводом, при этом каждая гайка 4,14 одной винтовой передачи жестко связана с одним из пальцев 6, 7 рабочего органа. 1 ил.
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
