Изобретение относится к промышленной робототехнике и предназначено для механизации и автоматизации процесса сборки и сварки трубных элементов с помощью роботов.
Целью изобретения яв(1яется обеспечение возможности захватывания, центровки и стыковки по крайней мере двух полых деталей.
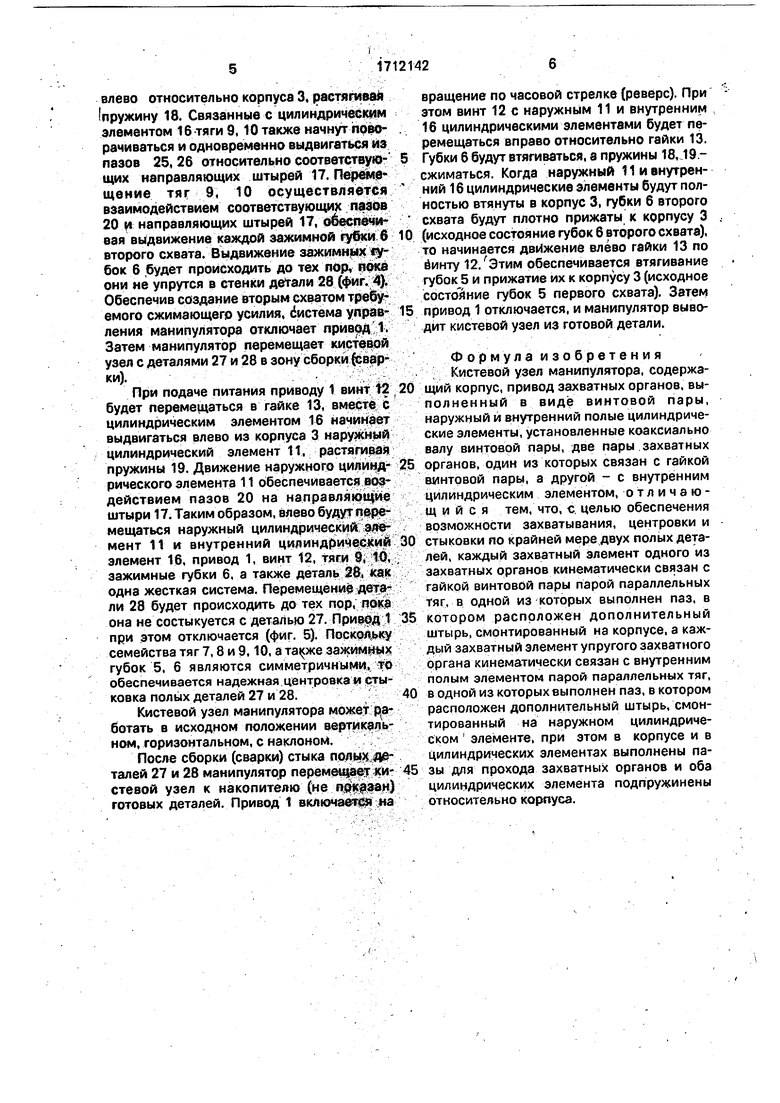
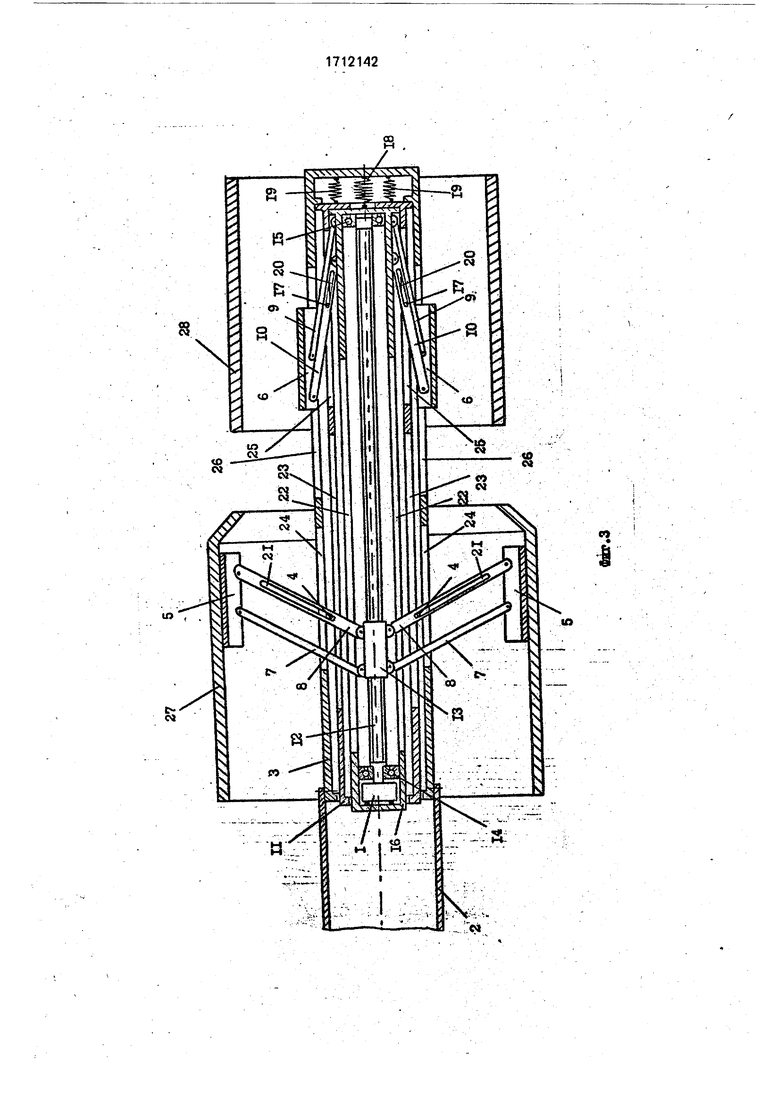
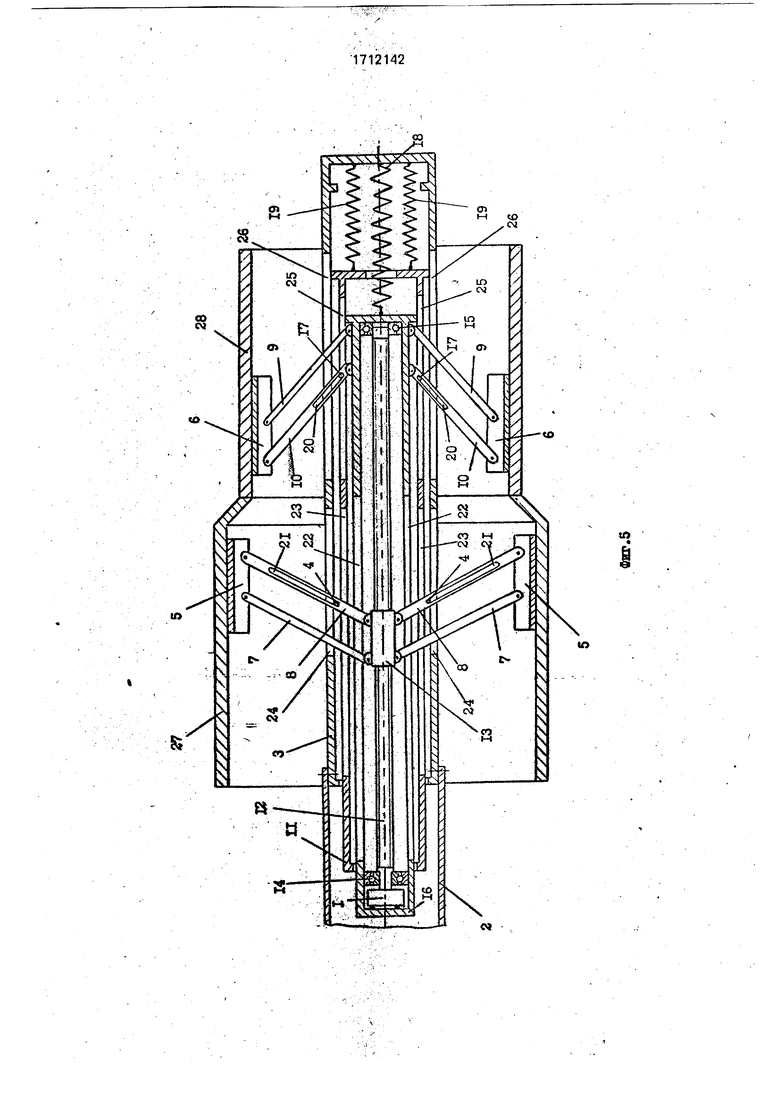
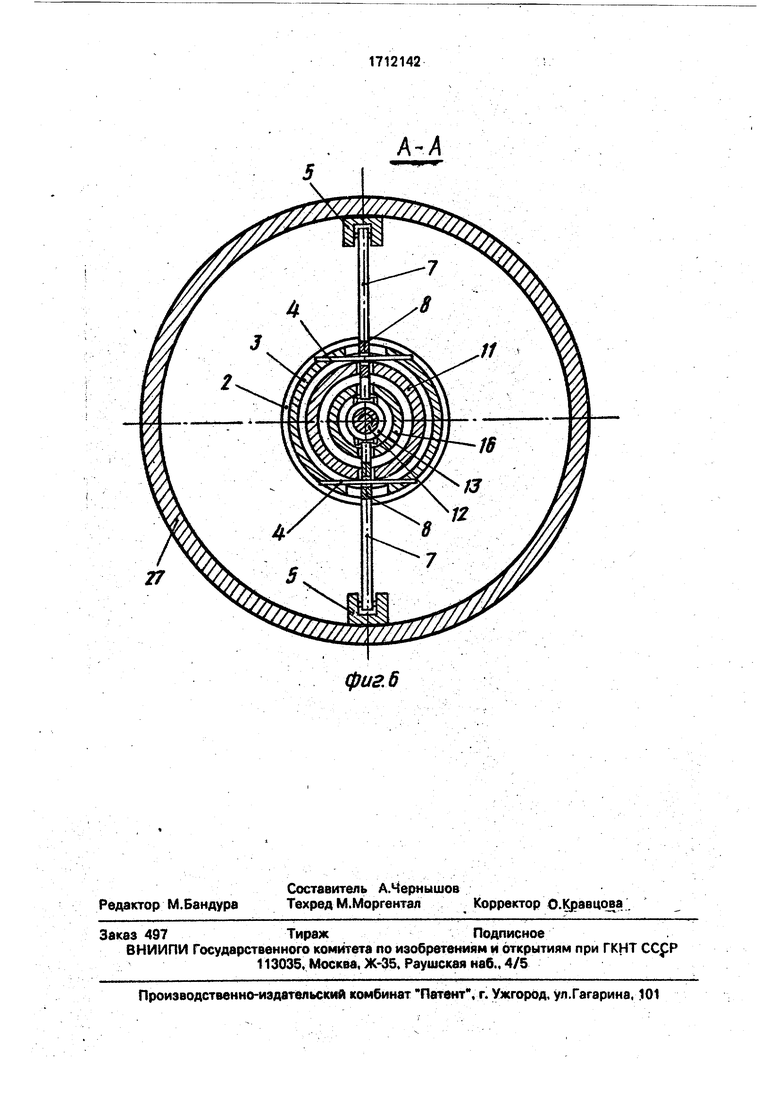
На фиг. 1 изображен в исходном состоянии кистевой узел манипулятора, когда губки первого схвата размещены в полости первой детали, продольный разрез; на фиг. 2 кистевой узел манипулятора с выдвинутыми губками первого схвата, продольный разрез; на фиг. 3 - кистевой узел манипулятора с выдвинутыми губками первого схвата, губки второго схвата размещены в полости второй детали/продольный разрез; на фиг. 4 кистевой узел манипулятора с выдвинутыми губками первого и второго схвата. продольный разрез; на фиг. 5- кистевой узел манипулятора с выдвинуть ми губками первого и второго схвата, первая и вторая полые детали отцентрованы и состыкованы, продольный разрез; на фиг. 6 - сечение А-А на фиг. 2.
Кистевой узел манипулятора (фиг. 1) содержит привод 1 захватных органов, выполненный в виде винтовой пары, основание 2, корпус 3 кистевого узла манипулятора по меньшей мере с двумя направляющими штырями 4, смонтированными на корпусе 3. Кистевой узел снабжен двухсхватным рабочим органом, каждый из схватов которого содержит по крайней мере пару губок 5 и б, снабженных парой параллельных тяг 7, 8 и 9, 10. Наружный полый цилиндрический элемент 11 установлен с возможностью возвратно-поступательного перемещения в полости корпуса 3. Губки 5 первого схвата кинематически связаны с приводом 1 через параллельные тяги 7, 8 и передачу в виде .винтовой пары винт 12 - гайка 13, при этом винт снабжен подшипниками 14 и 15. Полый цилиндрический элемент 36 установлен с возможностью возвратно-поступательного перемещения в полости цилиндрического элемента 11, который снабжен по меньшей мере двумя направляющими штырями 17 vi пружинами 18 и 19, упруго связывающими, соответственно, |сорпус 3 с полым цилиндрическим элементом 1Т и дополнительным цилиндрическим элементом 16, Привод 1 с винтовой парой винт 12 - гайка 13 закреплены в полости дополнительного цилиндрического элемента 16, шарнирно связанной через тя ги 9 и 10 с губками б второго схвата. При этом в одной из тяг 10 каждой губки 6 второго схвата выполнен паз 20, внутри
которого располагается направляющий дополнительный штырь 17, смонтированный на наружном цилиндрическом элементе 11. .В одной из тяг 8 каждой губки 5 первого схвата выполнен паз 21, в котором расположен дополнительный штырь 4, смонтированный на корпусе 3 и размещающийся за пределами наружного цилиндрического элемента 11. Тяги 7 и 8 каждой губки 5 первого схвата размещены в соответствующих пазах 22, 23, 24, выполненных в наружном цилиндрическом элементе 11 и корпусе 3. Тяги 9, 10 каждой губки 6 второго схвата размещень в соответствующих пазах 25,26, выполненных в наружном цилиндрическом элементе и корпусе.
На фиг. 1-5 показании различные рабочие состояния кистевого узла при стыковке полых деталей 27, 28..
Устройство работает следующим образом.
В исходном Г1оложении (фиг. 1) привод 1 отключен, два семейства зажимных губок 5 и 6 прижаты к корпусу, а цилиндрические элементы 11 и 16 втянуты в корпус 3, гайка 13 расположена в крайнем левом положении. Манипулятор перемещает кистевой узел таким образом, чтобы губки 5 первого схвата располагались в полости 27, предназначенной для захватывания. При включении привода 1 винт 12 вращается против часовой стрелки, а гайка 13 смещается, вправо по винту 12. Шарнирно закрепленные tia гайке 13 тяги 7, 8 поворачиваются относительно соответствующих направляющих штырей 4 и одновременно выдвигаются из пазов 22, 23, 24. Требуемое перемещение тяг 7, 8 обеспечивается взаимодействием соответствующих пазов 21 и направляющих штырей 4, обеспечивая выдвижение каждой закрепленной губки 5 первого схвата. Выдвижение зажимных губок 5 будет происходить до тех пор. пока они не упрутся в стены полой детали 27 (фиг. 2), при этом гайка 13 остановится и будет фиксирована в данном положении. Обеспечив создание первым охватом требуемого сжимающего усилия, система управления манипулятора (не показана) отключает привод 1. Затем манипулятор перемещает кистевой узел с деталью 27 таким образом, чтобы губки второго схвата нахадилйсь в полости детали 28 (фиг. 3). При этом подается питание приводу 1, который обеспечивает вращение винта 12 против часовой стрелки. Поскольку гайка 13 фиксированаВ данном положении, то винт 12 начинает перемещаться влево относительно гайки 13. Цилиндрический злембнт, 16 будет выдвигаться, т.е. перемещаться
влево относительно корпуса 3, растягивав пружину 18. Связанные с цилиндрическим элементом 16 тяги 9, 10 также начнут прворачиваться и одновременно выдвигаться из пазов 25, 26 относительно соответствую|цих направляющих штырей 17. Перемв щение тяг 9, 10 осуществляется взаимодействием соответствующих пазов 20 направляющих штырей 17, ооеспечивая Bbfдвижение каждой зажимной губки 6 второго схвата. Выдвижение зажимн1||х tyбок 6 будет происходить до тех пор, пока они не упрутся в стенки 28 (фиг. 4). Обеспечив создание вторым схватом требуемого сжимающего усилия, Система управления манипулятора отключает приврд;1. Затем манипулятор перемещает кистевой узел с деталями 27 и 28 в зону сборки ()..
При подаче питания приводу 1 винт t2 будет перемещаться в гайке 13, вместе с цилиндрическим элементом 16 начинает выдвигаться влево из корпуса 3 наружный цилиндрический элемент 11, растягивая пружины 19. Движение наружного цилинд рического элемента 11 обеспечивается воздействием пазов 20 на направляющие штыри 17. Таким образом, влево будут перемещаться наружный цилиндрический a/ieмент 11 и внутренний цилиндрический элемент 16, привод 1, винт 12, тяги 9, 10, зажимные губки 6, а также деталь 28, как одна жесткая система. Перемещение детали 28 будет происходить до тех пор, пока она не состыкуется с деталью 27. Привод 1 при этом отключается (фиг. 5). Поскольку семейства тяг 7,8 и 9,10, зажимных губок 5, 6 являются симметричными, то обеспечивается надежная центровка и стыковка полых деталей 27 и 28.
Кистевой узел манипулятора может ра ботать в исходном положении вертикальном, горизонтальном, с наклоном.
После сборки (сварки) стыка полцн.йЗ талей 27 и 28 манипулятор перемеиэ&Т кистевой узел к накопителю (не п,9К|(эан) готовых деталей. Привод 1 включа&к .на
вращение по часовой стрелке (реверс). При этом винт 12 с наружным 11 и внутренним 16 цилиндрическими элементами будет перемещаться вправо относительно гайки 13. Губки 6 будут втягиваться, а пружины 18,J9.сжиматься. Когда наружный 11 и внутренний 16 цилиндрические элементы будут полностью втянуты в корпус 3, губки 6 второго схвата будут плотно прижаты к корпусу 3 (исходное состояние губок 6 второго схвата), то начинается движение влево гайки 13 по ёинту 12.Этим обеспечивается втягивание губок 5 и прижатие их к корпусу 3 (исходное состояние губок 5 первого схвата). Затем привод 1 отключается, и манипулятор выводит кистевой узел из готовой детали.
Фор м у л а и 3 о б р е т е н и я Кистевой узел манипулятора, содержащий корпус, привод захватных органов, выполненный в виде винтовой пары, наружный и внутренний полые цилиндрические элементы, установленные коаксиально валу винтовой пары, две пары захватных органов, один из которых связан с гайкой винтрвой пары, а другой - с внутренним цилиндрическим элементом, отличающий с я тем, что, с целью обеспечения возможности захватывания, центровки и стыковки по крайней мере двух полых деталей, каждый захватный элемент одного из захватных органов кинематически связан с гайкрй винтовой пары парой параллельных тяг, в одной из которых выполнен паз, в котором расположен дополнительный шТырь, смонтированный на корпусе, а каждый захватный элемент упругого захватного органа кинематически связан с внутренним полым элементом парой параллельных тяг, в одной из которых выполнен паз, в котором расположен дополнительный штырь, смонтированный на наружном цилиндрическом элементе, при этом в корпусе и в цилиндрических элементах выполнены пазы для прохода захватных органов и оба цилиндрических элемента подпружинены относительно корпуса.
lo
м
5S
и
о
см
1А
еч1
,
И
и
U)
(
фигб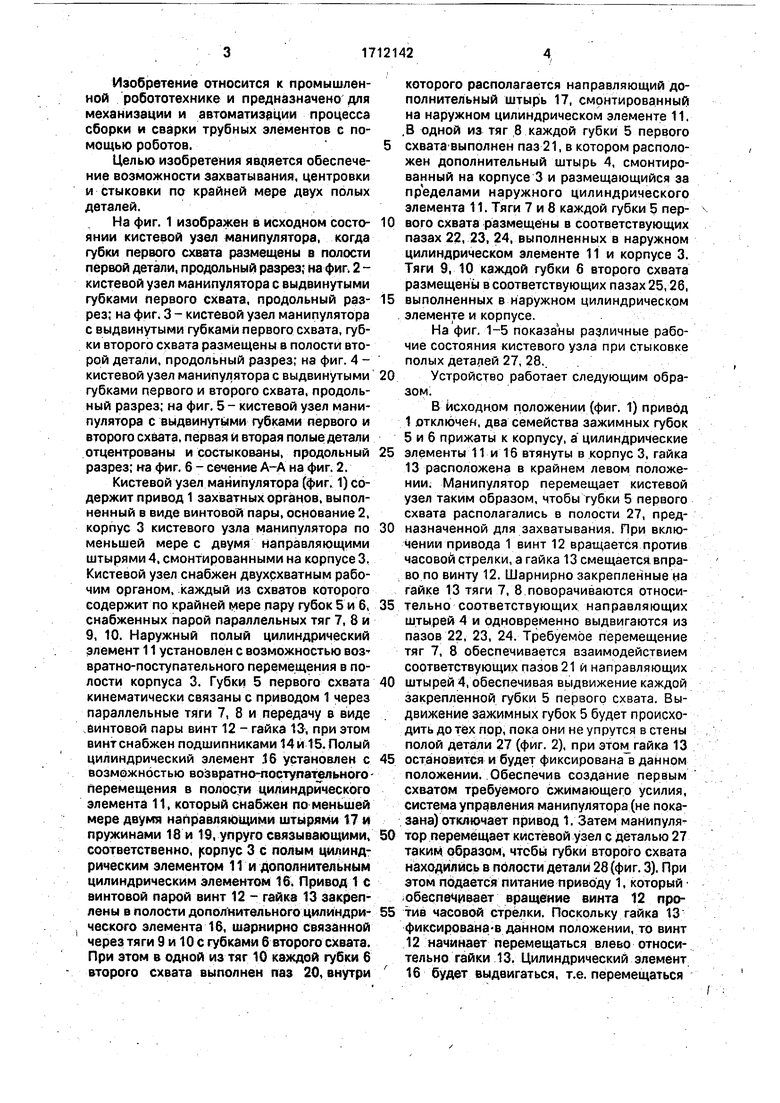
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1743856A1 |
| Захватное устройство | 1984 |
|
SU1222542A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Схват манипулятора | 1984 |
|
SU1283090A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Захватное устройство | 1989 |
|
SU1662842A1 |
| Захватное устройство | 1985 |
|
SU1305029A1 |
Изобретение относится к промышленной робототехнике и предназначено для механизации и автоматизации процесса сборки и сварки трубных элементов с М- мощью роботов. Целью изобретения является обеспечение возможности захватывания, центровки и стыковки по крайней мере двух полых деталей. Кистевой узел манипуляторасодержит привод 1, кинематически связанный с винтовой парой 12-13, и основание 2. Кистевой узел снабжен двухсхватным рабочим органом, каждый из схватов которого содержит пару губок 5 и 6, снабженных парой параллельных тяг 7,8 и 9,10. Нару)кный полый цилиндр 11 имеет возможность воз- вратно-поступательного перемещения в полости корпуса 3. Цилиндрический элемент 16 имеет возможность возвратно-поступательного перемещения в полости цилиндрического элемента 11. При включении привода 1 вращается винт 12, гайки 13. перемещаясь через тяги 7, 8, выдвигают губки 5 и происходит захват детали 27. При дальнейшем вращении привода винт 12 перемещается, выдвигая элемент 16. При этом тяги 9,10 выдвигают губки 6 и происходит захват детали 28. При дальнейшем вращении привода 1 винт 12 будет перемещаться в гайке, вместе с цилиндрическим элементом 16 выдвигает из корпуса 3 цилиндрический элемент 11, что приводит к сближению деталей 27 и 28. 6 ил.>&•»•И•Ч КЗii-i^kJi».to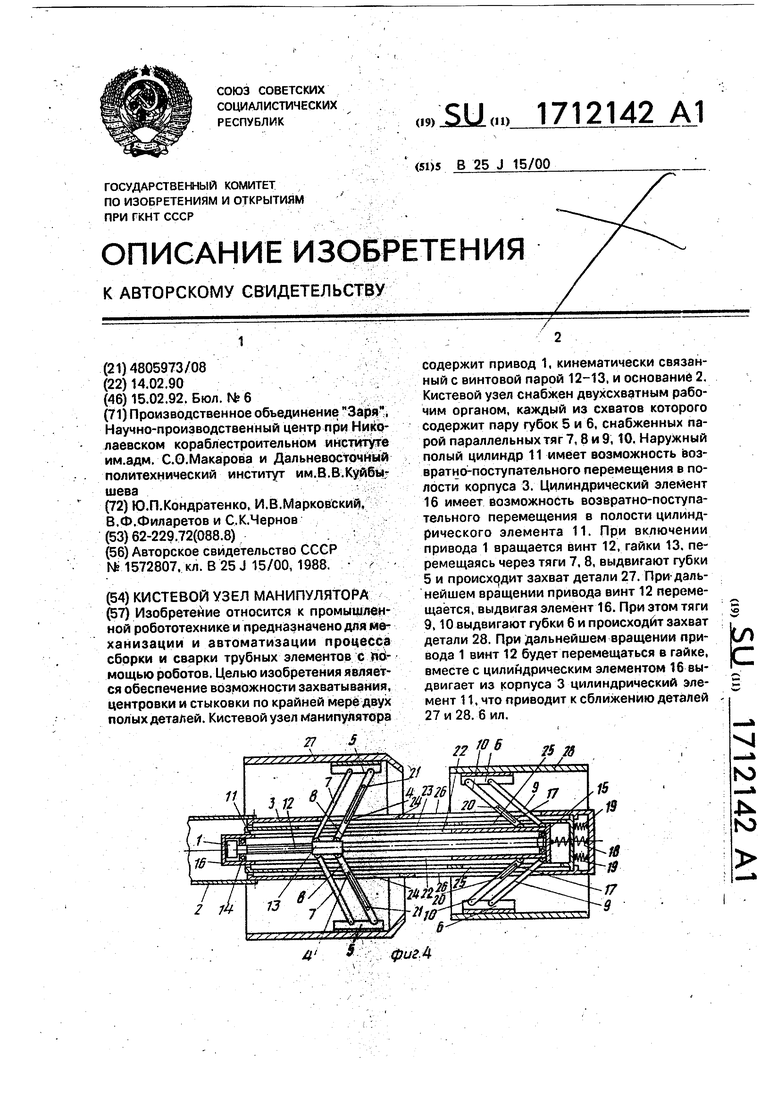
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| • v | |||
