Изобретение относится к машиностроению и может быть использовано в приводе хода самоходных транспортных средств, в частности строительно-дорожных машин.
Наиболее близким к предлагаемому является гидрообъемный привод транспортного средства с четырьмя ведущими колесами, содержащий реверсивный насос, гидромоторы привода колес, насос подпитки с подпиточными клапанами, золотниковый распределитель, клапан ИЛИ и линии связи.
Недостатком указанного привода является наличие большого числа распределительных и регулирующих элементов, соединений и линий связи, что приводит к снижению надежности гидропривода, усложняет монтаж и повышает стоимость машины, а также увеличивает потери энергии за счет наличия дроссельной системы делителя потока рабочей жидкости.
Кроме того, известный гидропривод не обеспечивает управления машины по курсу.
Цель изобретения - повышение надежности и снижение потерь энергии.
Цель достигается тем, что в гидрообъемном приводе транспортного средства с четырьмя ведущими колесами, гидромоторы привода колес каждого из бортов транспортного средства соединены параллельно, а гидромоторы привода колес левого и правого бортов - последовательно, при этом распределитель выполнен трехпозицион- ным четырехлинейным с электрическим пропорциональным управлением, одна его линия заглушена, другая его линия связана с линиями последовательной связи гидромоторов колес, третья с напорной линией насоса подпитки, а четвертая - с рабочими линиями насоса через клапан ИЛИ.
На чертеже изображена схема гидрообъемного привода хода транспортного средства с четырьмя ведущими колесами
Гидрообъемный привод хода содержит реверсируемый по потоку насос 1, гидромотор 2 и 3 привода колес одного из бортов транспортного средства (правого), гидромоторы k и 5 привода
25
агрегатируемый с основным насосом 1, клапан ИЛИ 8, систему 9 подпиточных клапанов, фильтр 10 системы подпитки предохранительный клапан 11 подпитки, предохранительные клапаны 12 и 13 основных линий подачи рабочей жидкос ти в гидромоторы и линии Й-20 связи Гидрообъемный привод работает сле Ю ДУЮЩИМ образом.
Рабочая жидкость от насоса 1 поступает к соединенным параллельно гидромоторам привода колес одного из бортов, далее слив из гидромоторов .г объединяется и поступает к параллель но соединенным гидромоторам привода колес другого борта. Таким образом осуществляется прямое и обратное движение машины в зависимости от на- 20 правления подачи рабочей ж-идкости от насоса 1.
Управление машиной по курсу и обе печение прямолинейного движения путем компенсации утечек осуществляется дистанционно с помощью перемещения золотника распределителя пропорционально подаваемому электрическому сигналу. Для поворота машины налево (относительно направления движения указанного на фиг.1 стрелкой) при подаче потока рабочей жидкости по линии 16 связи к гидромоторам k и 5 золотник распределителя 6 перемещают в крайнее левое положение, при котором происходит соединение через клапан ИЛИ 8 линии 18 подачи с линией 17 гидромоторов и 5 левого борта. Эти гидромоторы тормозятся за счет выравнивания давления в линии подачи 16 и слива 17 гидромоторов k и f и весь поток от насоса поступает к гидромоторам 2 и 3 правого борта. Для поворота машины направо золотник распределителя 6 перемещают в крайнее правое положение, при этом линии 17 и 18 подачи гидромоторов 2 и 3 соединяются с линией слива через линию 20 подпитки и подпиточный клапан 9, т.е. тормозится правый борт, а ® поток рабочей жидкости от насоса проходит только через гидромоторы левого борта. При реверсировании направления движения управление по курсу осуществляется аналогичным
30
35
40
45
колес другого борта (левого), трехпо- 55 образом. Поскольку распределитель 6
5
агрегатируемый с основным насосом 1, клапан ИЛИ 8, систему 9 подпиточных клапанов, фильтр 10 системы подпитки, предохранительный клапан 11 подпитки, предохранительные клапаны 12 и 13 основных линий подачи рабочей жидкости в гидромоторы и линии Й-20 связи. Гидрообъемный привод работает сле- ДУЮЩИМ образом.
Рабочая жидкость от насоса 1 поступает к соединенным параллельно гидромоторам привода колес одного из бортов, далее слив из гидромоторов г объединяется и поступает к параллельно соединенным гидромоторам привода колес другого борта. Таким образом осуществляется прямое и обратное движение машины в зависимости от на- 0 правления подачи рабочей ж-идкости от насоса 1.
Управление машиной по курсу и обеспечение прямолинейного движения путем компенсации утечек осуществляется дистанционно с помощью перемещения золотника распределителя пропорционально подаваемому электрическому сигналу. Для поворота машины налево (относительно направления движения указанного на фиг.1 стрелкой) при подаче потока рабочей жидкости по линии 16 связи к гидромоторам k и 5 - золотник распределителя 6 перемещают в крайнее левое положение, при котором происходит соединение через клапан ИЛИ 8 линии 18 подачи с линией 17 гидромоторов и 5 левого борта. Эти гидромоторы тормозятся за счет выравнивания давления в линии подачи 16 и слива 17 гидромоторов k и f и весь поток от насоса поступает к гидромоторам 2 и 3 правого борта. Для поворота машины направо золотник распределителя 6 перемещают в крайнее правое положение, при этом линии 17 и 18 подачи гидромоторов 2 и 3 соединяются с линией слива через линию 20 подпитки и подпиточный клапан 9, т.е. тормозится правый борт, а ® поток рабочей жидкости от насоса проходит только через гидромоторы левого борта. При реверсировании направления движения управление по курсу осуществляется аналогичным
0
5
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРООБЪЕМНЫЙ ПРИВОД ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА АВТОМАТИЧЕСКОЙ СМЕНЫ РАБОЧЕЙ ЖИДКОСТИ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, НАСОСНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА КОНДИЦИОНИРОВАНИЯ И РЕВЕРСА ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА И ГИДРОМОТОРНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108507C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| Гидрообъемная трансмиссия автогрейдера | 1987 |
|
SU1466964A1 |
| Транспортное средство | 1986 |
|
SU1402444A1 |
| Землеройная машина | 1982 |
|
SU1060771A1 |
| САМОХОДНАЯ МАШИНА ДЛЯ ОБРАБОТКИ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ | 2015 |
|
RU2593251C1 |
| Гусеничная машина | 1985 |
|
SU1306796A1 |
| Самоходная машина | 1986 |
|
SU1350050A1 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 1998 |
|
RU2158861C2 |
Изобретение относится к машиностроению и может быть использовано в приводе хода самоходных транспортных средств, в частности строS. ительно-дорожных машин с четырьмя ведущими колесами. Цель изобретения - повышение надежности и снижение потерь энергии. Для этого гидро- моторы привода хода колес каждого из бортов транспортного средства, а именно пара гидромоторов 2 и 3, а также гидромоторы 4 и 5 соединены между собой параллельно, а гидромоторы привода колес правого и левого бортов соединены последовательно. Имеются также распределитель 6, выполненный трехпозиционным, четырехлинейным с электрическим пропорциональным управлением, клапан ИЛИ 8, насос 7 подпитки и гидролинии связи. Привод позволяет обеспечить плавное управление машиной по курсу с заданным радиусом поворота. 1 ил. ft /я (/ С ь Јь Сл сл t-vl h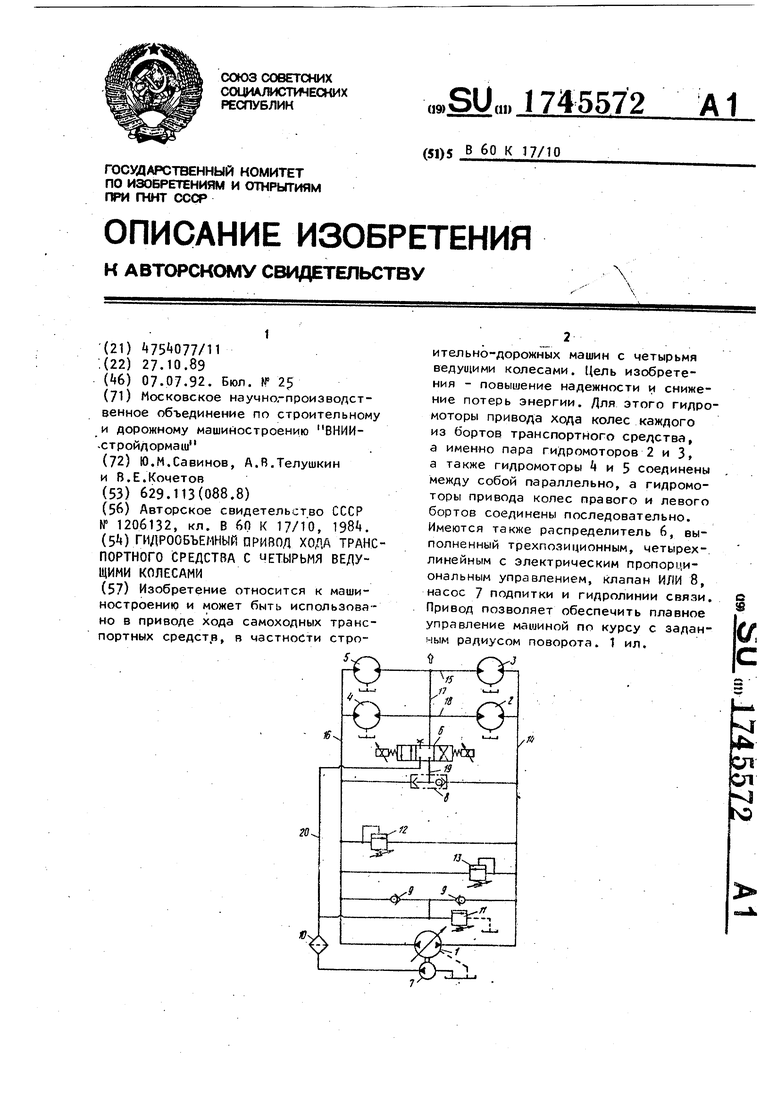
зиционный четырехлинейный распределитель 6с электрическим пропорциональным управлением, насосм 7 подпитки,
является аппаратом пропорционального управления потоком, то в зависимости от величины электрического
5
( сигнала золотник распределите/..) может быть установлен в любом промежуточном положении как при перемещении вправо, так и влево, что поволяет осуществить частичное под- тормаживание одного из бортов и таким образом плавное управление курсом машины, а также осуществление прямолинейного движения.
Благодаря исключению из схемы ряда элементов дроссельного регулирования предлагаемый гидропривод по сравнению с известным имеет менее энергоемкую конструкцию и более высокую надежность при одновременном обеспечении возможности управления транспортным средством по курсу. Кроме того, за счет выполнения гидрораспределителя электрическим с пропорциональным управлением обеспечивается плавное управление машиной по курсу с заданным радиусом поворота .
1
7 55726
Формула изобретения
Гидрообъемный привод хода транспортного средства с четырьмя ведущими колесами, содержащий реверсивный насос, гидромоторы привода колеса, насос подпитки с подпиточными клэ- панами, золотниковый распределитель, клапан ИЛИ и линии связи, о т л и IO чающийся тем, что, с целью повышения надежности и снижения потерь энергии, гидромоторы привода колес кжадого из бортов транспортного средства соединены между собой параллельно, а гидромоторы привода колес левого и правого бортов - последовательно, при этом распределитель выполнен трехпояиционным четырехлинейным с электрическим про20 порциональным управлением, одна его линия заглушена, другая связана с линиями последовательной связи гидромоторов колес, третья - с напорной линией насоса подпитки, а чет25 вертая - с рабочими линиями насоса через клапан ИЛИ.
15
| Гидрообъемный привод хода транспортного средства | 1984 |
|
SU1206132A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
