Изобретение относится к системам шагового электропривода и может быть ис- пользоЁано в разомкнутом электроприводе, работающем в режиме периодических включений, например приводе транспорта бумаги в печатающих устройствах.
Целью изобретения является повышение нагрузочной способности и надежности /привода за счет компенсации влияния коле баний ротора двигателя при остановке на нагрузочную характеристику первого шага : следующего цикла.ч
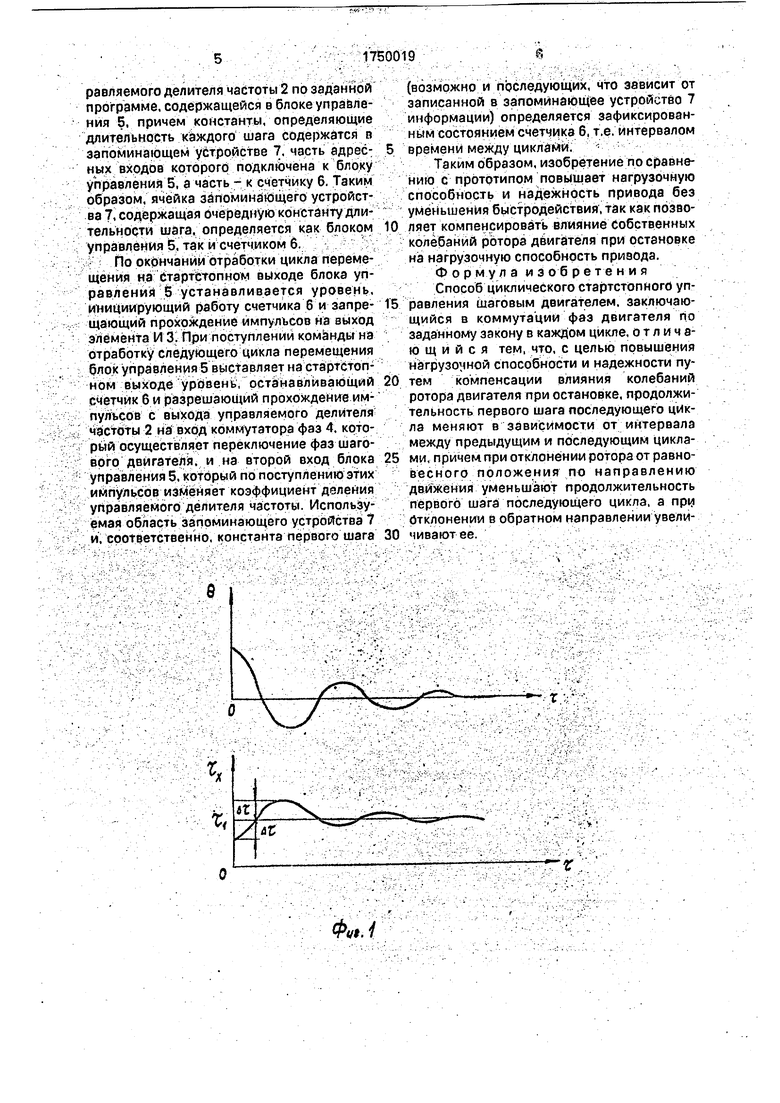
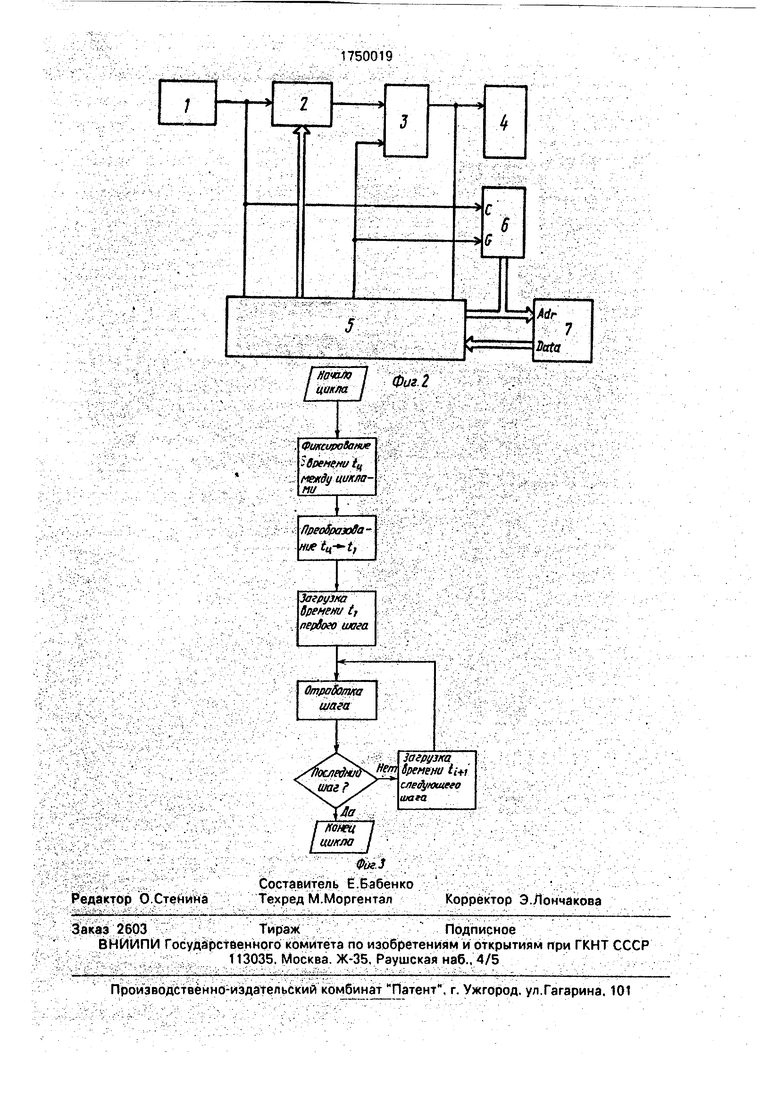
На фиг. 1 приведены временные диаг- /; раммы; на фиг. 2- блок-схема устройства, . реализующего способ: на фиг. 3 - алгоритм работы.
Способ реализуется следующим образом. В алфавитно-цифровом печатающем устройстве имеется шаговый.электропривод вертикального транспорта бумаги, перемещающий ее. после завершения1 печати
: на бдну строку (4,23 мм) за 20 мс путем
.подами на шаговый двигатель серии импульсов (например, 14) коммутации с заданным
(параболическим) законом разгойа-тормо- женмя, после чего двигатель останавливается для осуществления устройством печати следующей строки. Таким образом, шаговый двигатель работает в циклическом стар .тстрпном режиме с заданным законом коммутации; при этом время между циклами определяется временем печати и в общем
:;случае может быть пройзвольнУм.
При остановке ротор двигателя совершает затухающие свободные колебания (см. фиг. 1, где 0- угол рассогласоваЯия между полем статора и ротором, a t t (Lh - относительное время, круговая частота собХ|
сл о о
ю
ственных колебаний привода) с периодом 2,4 мс е пределах нескольких градусов, которые не влияют на точность печатаемой строки, так как малы относительно общего интервала перевода строки, однако могут приводить к перевода на следующую строку. ч
Чтобы устранить влияние этих колебаний на нагрузочную способность привода, длительность гх первого шага изменяют в зависимости от интервала времени ru между циклами, в частности противофазно собственным колебаниям ротора двигателя в диапазоне п±Дт(п - исходное значение длительности первого шага, Дг- разность времени между исходным первым и последним шагами цикла). Зависимость от ru можно определить более точно, исходя из уравнений движения ротора шагового двигателя, описываемого (см М.М. Соколов. В.П. Рубцов. Дискретный электропривод механизмов электротермических установок.- М.: Энергоатомиздат, 1986, с.60) приближенной формулой
0 +2а0 +0 у.
(D
где в- угол рассогласования между полем статора и ротором:
а - коэффициент вязкого трения, учитывающий демпфирующие свойства привода;
у- угол поворота поля статора Решение уравнения (1) записывается следующим образом:
0 е
-аГ,
{(ft-У)
- у) cos b т +
+ ft-+.ab(ft-r)8inbr}+fr
где b v(1 - а2) - частота колебаний:
в0 - 9 (0)- начальное отклонение ротора;
ft #(0)- начальная угловая скорость ротора.
Угловая скорость ротора определяется формулой
Г0о- cosbr ав0 +(а2+Ь2.(00-у)
(3)
sJn b r
Принимая за точку отсчета положение поля статора по окончании цикла и подставляй в (2) TI при начальных условиях во 00 - 0 и у УО (уь - угол поворота по0
5
0
5
0
5
0
5
0
5
ля статора за один шаг), получим угол в, при котором включается второй шаг в случае начала следующего цикла при остановившемся роторе.
С другой стороны, если следующий цикл начинается до успокоения ротора, то подставляя в (2) и (3) ги при начальных условиях и $,-ft, и у- Q (On.fo - известные угол и угл овая скорость ротора в момент включения последнего шага), получим угол ft и угловую скорость вц ротора в момент начала следующего цикла. Принимая угол поворота ротора по истечении времени ть (т.е. к моменту включения второго шага) равным углу в, при котором включается второй шаг в случае начала следующего цикла при остановившемся роторе, из формулы (2) с учетом того, что у - YO ft ft . и во - Оц , численным или графоаналитическим методом находим искомую зависимость длительности TV. первого шага цикла от интервала времени ги между циклами.
Устройство, реализующее способ циклического стартстопного управления шаговым двигателем, содержит генератор 1, управляемый делитель частоты 2, элемент Л 3, коммутатор фаз 4. блок управления 5, счетчик б и запоминающее устройство 7.
Блок управления 5 имеет следующие функциональные связи: первый вход, на который поступают импульсы синхронизации от генератора 1; информационный выход, который определяет коэффициент деления управляемого делителя частоты 2 и, следовательно, частоту импульсов, поступающих на коммутатор фаз 4; стартстопный выход, сигнал которого включается на время отработки цикла и разрешает прохождение импульсов на коммутатор фаз 4; второй вход (вход прерываний), на который поступают те же импульсы, что и на коммутатор фаз 4. эти импульсы блок управления 5 подсчитывает и по ним меняет частоту по заданному закону; адресный выход, подключенный к части адресных входов запоминающего устройства 7, и вход данных, по которому из запоминающего устройства 7 поступают константы, определяющие длительность тактов коммутации шагового двигателя по заданному закону.
Устройство работает следующим образом,
Импульсы с генератора 1 поступают на вход управляемого делителя частоты 2 и на синхронизацию блока управления 5. блок управления 5 управляет разгоном-торможением шагового двигателя в каждом цикле отработки перемещения {перевода строки) путем изменения коэффициента деления управняемого делителя частоты 2 по заданной программе, содержащейся в блоке управления 5, причем константы, определяющие длительность каждого шага содержатся в запоминающем устройстве 7. часть адрес- ных входов которого подключена к блоку управления 5, а часть - к счетчику 6. Таким образом, ячейка запоминающего устройства 7, содержащая очередную константу длительности шага, определяется как блоком управления 5. так и счетчиком 6.
По окончании отработки цикла перемещения на стартстопном выходе блока управления 5 устанавливается уровень, инициирующий работу счетчика 6 и запре- щающий прохождение импульсов на выход элемента И 3. При поступлении команды на отработку следующего цикла перемещения блок управления 5 выставляет на стартстопном выходе уровень, останавливающий счетчик б и разрешающий прохождение импульсов с выхода управляемого делителя частоты 2 на вход коммутатора фаз 4. который осуществляет переключение фаз шагового двигателя, и на второй вход блока управления 5. который по поступлению этих импульсов изменяет коэффициент деления управляемого делителя частоты. Используемая область запоминающего устройства 7 и. соответственно, константа первого шага
(возможно и последующих, что зависит от записанной в запоминающее устройство 7 информации) определяется зафиксированным состоянием счетчика 6, т.е. интервалом времени между циклами.
Таким образом, изобретение по сравнению с прототипом повышает нагрузочную способность и надежность привода без уменьшения быстродействия, так как позволяет компенсировать влияние собственных колебаний ротора двигателя при остановке на нагрузочную способность привода. Формула изобретения Способ циклического стартстопного управления шаговым двигателем, заключающийся в коммутации фаз двигателя по заданному закону в каждом цикле, отличающийся тем, что, с целью повышения нагрузочной способности и надежности путем компенсации влияния колебаний ротора двигателя при остановке, продолжительность первого шага последующего цикла меняют в зависимости от интервала между предыдущим и последующим циклами, причем при отклонении ротора от равно- весного положения по направлению движения уменьшают продолжительность первого шага последующего цикла, а при Отклонении в обратном направлении увеличивают ее.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ циклического управления шаговым двигателем | 1991 |
|
SU1820475A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1989 |
|
SU1679595A1 |
| Устройство для управления шаговым двигателем | 1990 |
|
SU1693708A1 |
| Устройство для управления волновым шаговым двигателем | 1989 |
|
SU1700739A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU924816A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ M-ФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1991 |
|
RU2010294C1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
Изобретение относится к электротехнике и. может быть использовано в разомкну том дискретном электропрйвЬдё;, работающем в режиме периодических в)Шй%нйй, например, приводе транспорта бумаги в печатающих устройствах. Цель изобретения - повышение нагрузочной способности и надежности привода за счет компенсаций влияния колебаний ротора двигаУеля при остановке. При отработке цикла по заданному закону разгона-тормЬжейия длитёль- ность первого шага цикла меняют в зависимости от интервала времени между циклами противофазно собственным колебаниям ротора двигателя при остановке. Устройство, реализующее, способ, содержит генератор 1 .управляемый делитель2 частоты, элемент И 3, коммутатор фаз 4, блок .управления 5, с четчик 6 и запоминающее устройство 7. 3 ил. . ; ; :; v ;:
Фаг 2
| Способ старт-стопного управления шаговым двигателем | 1987 |
|
SU1480080A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Соколов М.М. | |||
| Рубцов В.П | |||
| Дискретный электропривод механизмов электротерми-: ческих установок.-М.: Энергоатомиздат, 1986. | |||
