Изобретение относится к производству электрических соединителей, а именно к устройствам для их сборки.
Цель изобретения - улучшение эксплуатационных возможностей.
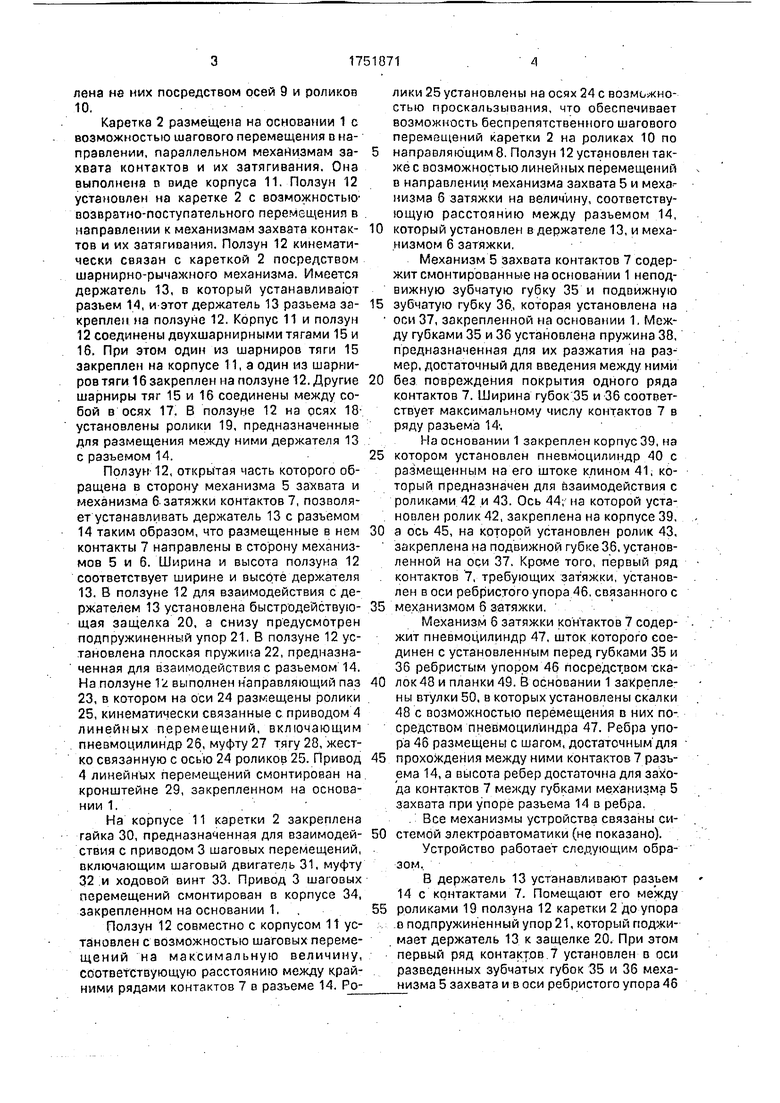
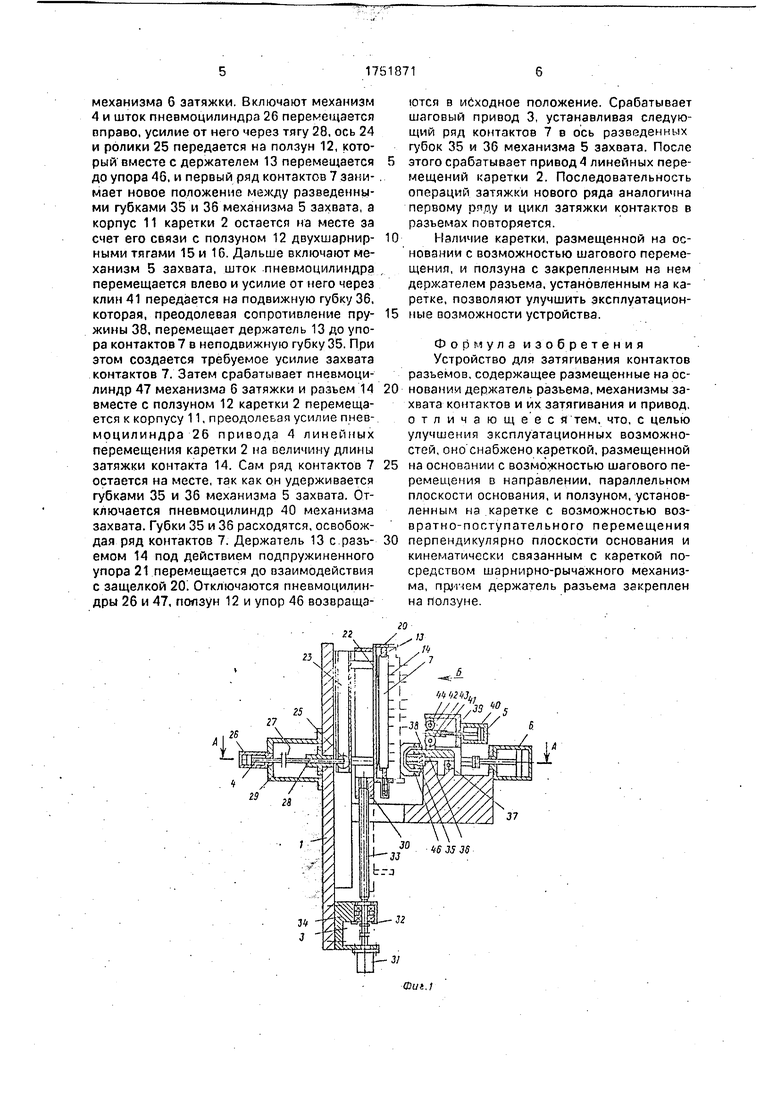
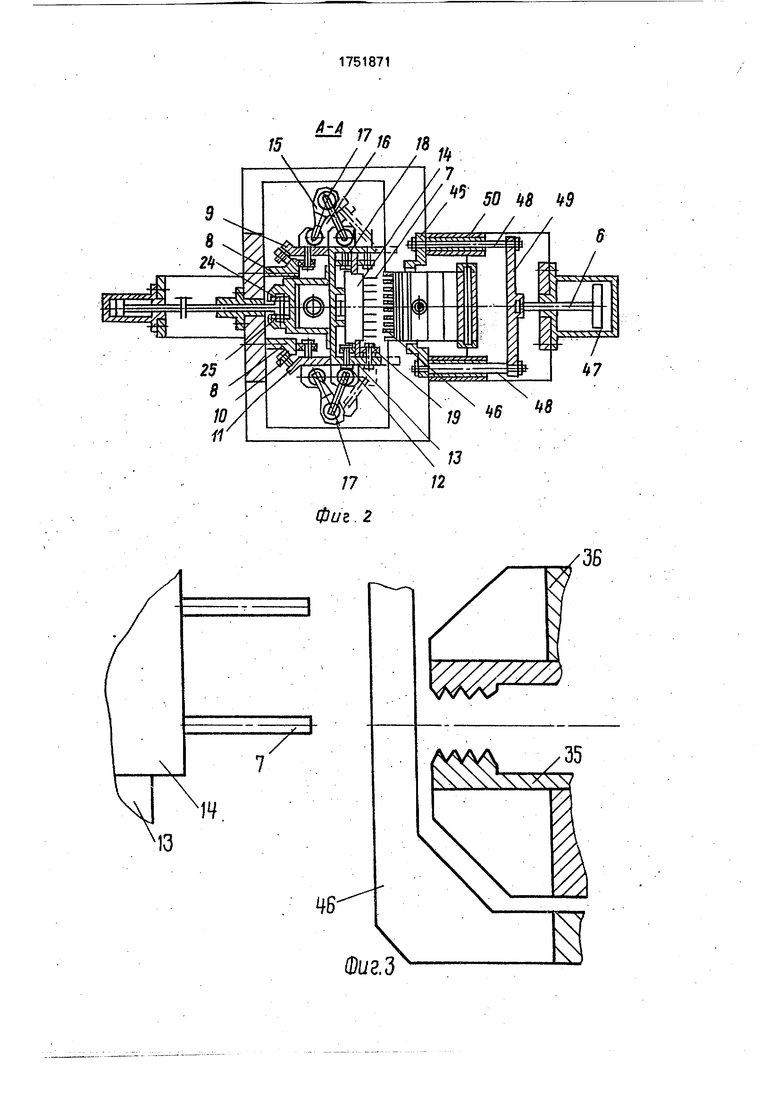
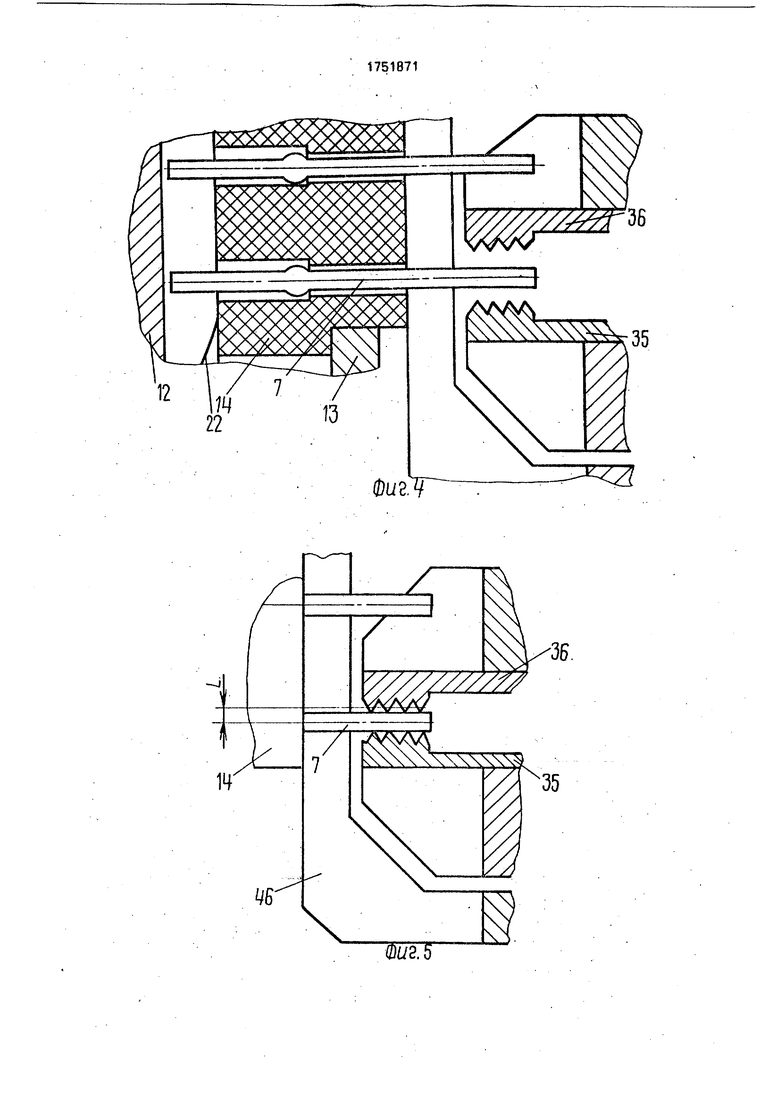
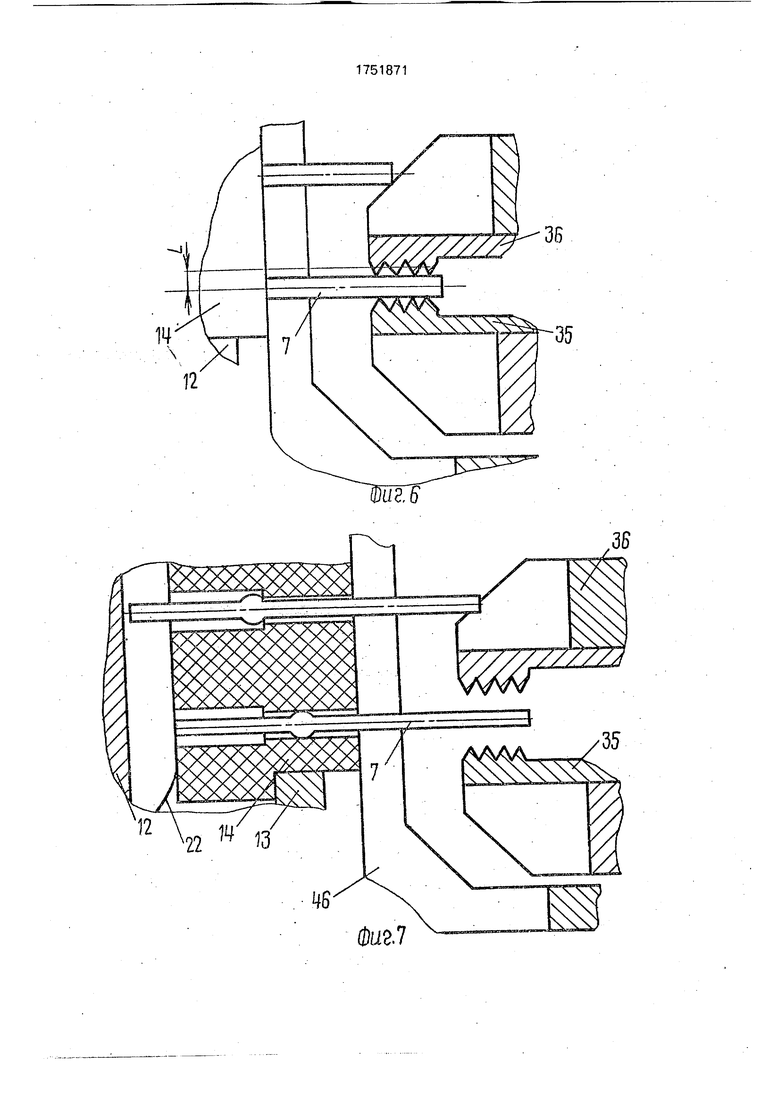
На фиг.1 схематически изображено устройство; на фиг.2 - сечение А - А на фиг.1; на фиг.З - исходное положение держателя, в котором размещен разъем с контактами, перед губками и толкателем механизмов захвата и затяжки; на фиг.4 - положение разъема с контактами, губок механизма захвата после подачи каретки при взаимодействии ее с приводом линейных перемещений и упора разъема в толкатель механизма затяжки; на фиг.5 - положение держателя, разъема с контактами и захватывающих губок в момент захвата контактов и перемещения относительно каретки держателя с разъемом при взаимодействии верхней губки с контактами; на фиг.6 - положение разъема с контактами и захватывающих губок в момент срабатывания механизма затяжки и перемещения каретки с разъемом под воздействием толкателей механизма затяжки; на фиг.7 - положение разъема с контактами
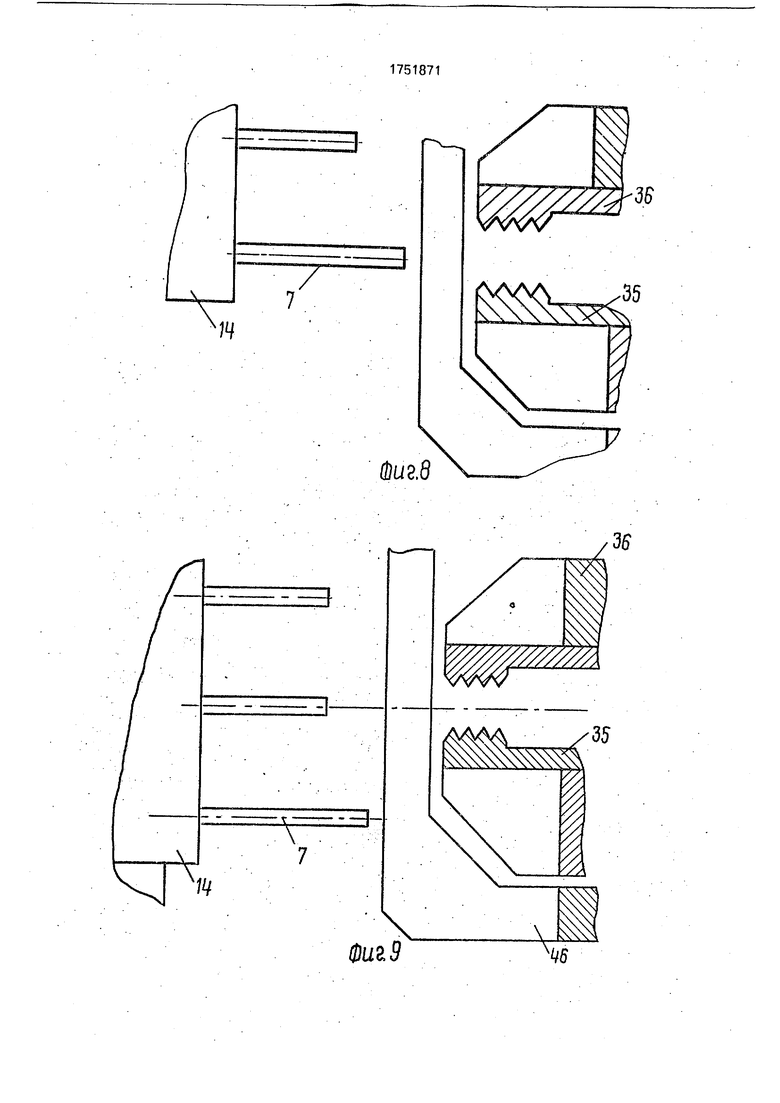
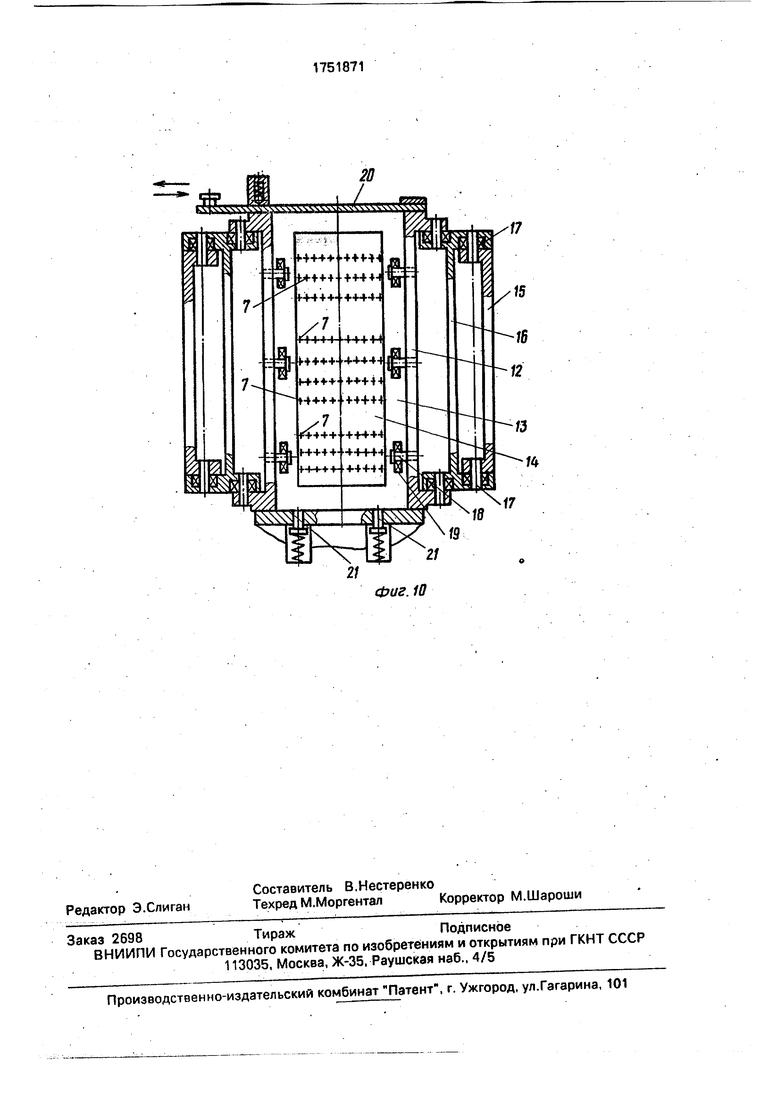
после взаимодействия его с толкателем механизма затяжки, освобождения контактов и возвращения держателя в исходное положение в каретке под воздействием подпружиненного упора; на фиг.8 - положение разъема с контактами в каретке и толкателя механизма затягивания после возврата в исходное положение каретки от привода линейных перемещений, а толкателя от механизма затяжки; на фиг.9 - положение разъема с контактами перед губками и толкателем механизмов захвата и затяжки после перемещения каретки от шагового привода на величину, равную расстоянию между рядами контактов, требующих затяжки; на фиг. 10 - установка разъема с держателем в гнездо.
Устройство для затягивания контактов разъемов содержит основание 1, на котором смонтирована каретка 2, связанная с приводом 3 шаговых перемещений и приводом 4 линейных ее перемещений. На основании 1 установлен механизм 5 захвата и механизм 6 затяжки контактов 7, а также закреплены направляющие 8, предназначенные для взаи - модействия с кареткой 2, которая установсо
с
VI
2
00
VI
лена не них посредством осей 9 и роликов 10.
Каретка 2 размещена на основании 1 с возможностью шагового перемещения в направлении, параллельном механизмам захвата контактов и их затягивания. Она выполнена п виде корпуса 11, Ползун 12 установлен на каретке 2 с возможностью1 возвратно-поступательного перемещения в направлении к механизмам захвата контактов и их затягивания. Ползун 12 кинематически связан с кареткой 2 посредством шарнирно-рычажного механизма. Имеется держатель 13, в который устанавливают разъем 14, и этот держатель 13 разъема закреплен на ползуне 12. Корпус 11 и ползун 12 соединены двухшарнирными тягами 15 и 16. При этом один из шарниров тяги 15 закреплен на корпусе 11, а один из шарниров тяги 16 закреплен на ползуне 12. Другие шарниры тяг 15 и 16 соединены между собой в осях 17. В ползуне 12 на осях 18- установлены ролики 19, предназначенные для размещения между ними держателя 13 с разъемом 14.
Ползун-12, открытая часть которого обращена в сторону механизма 5 захвата и механизма б затяжки контактов 7, позволяет устанавливать держатель 13 с разъемом 14 таким образом, что размещенные в нем контакты 7 направлены в сторону механизмов 5 и 6. Ширина и высота ползуна 12 соответствует ширине и высоте держателя 13. В ползуне 12 для взаимодействия с держателем 13 установлена быстродействующая защелка 20, а снизу предусмотрен подпружиненный упор 21, В ползуне 12 установлена плоская пружина 22, предназначенная для взаимодействия с разъемом 14. На ползуне 12 выполнен направляющий паз 23, в котором на оси 24 размещены ролики 25, кинематически связанные с приводом 4 линейных перемещений, включающим пнезмоцилиндр 26, муфту 27 тягу 28, жестко связанную с осью 24 роликов 25. Привод 4 линейных перемещений смонтирован на кронштейне 29, закрепленном на основании 1.
На корпусе 11 каретки 2 закреплена гайка 30, предназначенная для взаимодействия с приводом 3 шаговых перемещений, включающим шаговый двигатель 31, муфту 32 и ходовой винт 33. Привод 3 шаговых перемещений смонтирован в корпусе 34, закрепленном на основании 1,
Ползун 12 совместно с корпусом 11 установлен с возможностью шаговых перемещений на максимальную величину, соответствующую расстоянию между крайними рядами контактов 7 в разъеме 14. Ролики 25 установлены на осях 24 с возможностью проскальзывания, что обеспечивает возможность беспрепятственного шагового перемещений каретки 2 на роликах 10 по
направляющим 8. Ползун 12 установлен также с возможностью линейных перемещений в направлении механизма захвата 5 и механизма б затяжки на величину, соответствующую расстоянию между разъемом 14,
0 который установлен в держателе 13, и механизмом 6 затяжки,
Механизм 5 захвата контактов 7 содержит смонтированные на основании 1 неподвижную зубчатую губку 35 и подвижную
5 зубчатую губку 36, которая установлена на оси 37, закрепленной на основании 1, Между губками 35 и 36 установлена пружина 38, предназначенная для их разжатия на размер, достаточный для введения между ними
0 без повреждения покрытия одного ряда контактов 7. Ширина губок 35 и 36 соответствует максимальному числу контактов 7 в ряду разъема 14.
На основании 1 закреплен корпус 39, на
5 котором установлен пневмоцилиндр 40 с размещенным на его штоке клином 41, который предназначен для взаимодействия с роликами 42 и 43. Ось 44; на которой установлен ролик 42, закреплена на корпусе 39,
0 а ось 45, на которой установлен ролик 43, закреплена на подвижной губке 36, установленной на оси 37. Кроме того, первый ряд контактов 7, требующих затяжки, установлен в оси ребристого упора 46, связанного с
5 механизмом 6 затяжки.
Механизм 6 затяжки контактов 7 содержит пневмоцилиндр 47, шток которого соединен с установленным перед губками 35 и 36 ребристым упором 46 посредством ска0 лок48 и планки 49. В основании 1 закреплены втулки 50, в которых установлены скалки 48 с возможностью перемещения в них посредством пневмоцилиндра 47. Ребра упора 46 размещены с шагом, достаточным для
5 прохождения между ними контактов 7 разъема 14, а высота ребер достаточна для захода контактов 7 между губками механизма 5 захвата при упоре разъема 14 в ребра. Все механизмы устройства связаны си0 стемой электроавтоматики (не показано).
Устройство работает следующим образом.
В держатель 13 устанавливают разъем 14 с контактами 7. Помещают его между
5 роликами 19 ползуна 12 каретки 2 до упора о подпружиненный упор 21, который поджимает держатель 13 к защелке 20. При этом первый ряд контактов 7 установлен в оси разведенных зубчатых губок 35 и 36 механизма 5 захвата и в оси ребристого упора 46
механизма 6 затяжки. Включают механизм 4 и шток пневмоцилиндра 26 перемещается вправо, усилие от него через тягу 28, ось 24 и ролики 25 передается на ползун 12, который вместе с держателем 13 перемещается до упора 46, и первый ряд контактов 7 зани- мает новое положение между разведенными губками 35 и 36 механизма 5 захвата, а корпус 11 каретки 2 остается на месте за счет его связи с ползуном 12 двухшарнир- ными тягами 15 и 16. Дальше включают механизм 5 захвата, шток пневмоцилиндра перемещается влево и усилие от него через клин 41 передается на подвижную губку 36, которая, преодолевая сопротивление пру- жины 38, перемещает держатель 13 до упора контактов в неподвижную губку 35. При этом создается требуемое усилие захвата контактов 7. Затем срабатывает пневмоци- линдр 47 механизма 6 затяжки и разъем 14 вместе с ползуном 12 каретки 2 перемещается к корпусу 11, преодолевая усилие пневмоцилиндра 26 привода 4 линейных перемещения каретки 2 на величину длины затяжки контакта 14. Сам ряд контактов 7 остается на месте, так как он удерживается губками 35 и 36 механизма 5 захвата. Отключается пневмоцилиндр 40 механизма захвата. Губки 35 и 36 расходятся, освобождая ряд контактов 7. Держатель 13 с разъ- емом 14 под действием подпружиненного упора 21 перемещается до взаимодействия с защелкой 20. Отключаются пневмоцилин- дры 26 и 47, ползун 12 и упор 46 возвращаются в исходное положение. Срабатывает шаговый привод 3, устанавливая следующий ряд контактов 7 в ось разведенных губок 35 и 36 механизма 5 захвата. После этого срабатывает привод 4 линейных перемещений каретки 2. Последовательность операций затяжки нового ряда аналогична первому ряду и цикл затяжки контактов в разъемах повторяется.
Наличие каретки, размещенной на основании с возможностью шагового перемещения, и ползуна с закрепленным на нем держателем разъема, установленным на каретке, позволяют улучшить эксплуатационные возможности устройства.
Формула изобретения Устройство для затягивания контактов разъемов, содержащее размещенные на основании держатель разъема, механизмы захвата контактов и их затягивания и привод. отличающееся тем, что, с целью улучшения эксплуатационных возможностей, оно снабжено кареткой, размещенной на основании с возможностью шагового перемещения в направлении, параллельном плоскости основания, и ползуном, установленным на каретке с возможностью возвратно-поступательного перемещения перпендикулярно плоскости основания и кинематически связанным с кареткой посредством шарнирно-рычажного механизма, прячем держатель разъема закреплен на ползуне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Устройство для автоматической сборки нецоколеванных миниатюрных ламп накаливания | 1958 |
|
SU121512A1 |
| Станок для заплетки канатов | 1976 |
|
SU614144A1 |
| Загрузочный ротор | 1990 |
|
SU1757842A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| Полуавтоматическая линия для сборки трубчатых секций теплообменников | 1982 |
|
SU1134336A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Автомат для изготовления деталей из ленточного материала | 1988 |
|
SU1634352A1 |
| Устройство для удаления изношенных соединительных пальцев звеньев гусениц транспортных средств | 1982 |
|
SU1060390A1 |
Сущность изобретения: корпус разъема закрепляется с возможностью шагового перемещения вдоль механизмов захвата и затягивания контактов и с возможностью возвратно-поступательного перемещения в направлении к этим механизмам. 10 ил,
23
zi
/ /
W 09 /
L/
V ft/ „/ /
Ш 91
LI
С глф
-flf
/
LI
V-V
Si
UQiSLl
12
if
де
35
ФигТ
2
0i/S.5
12
J
36
SSSS.
35
ШгТ
Фаз. 7
г- со
1Л
гto
СО
шжш
со
-осг
3
21
фиг. 10
| Авторское свидетельство СССР № 12992217,кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для затягивания контактов | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| США | |||
| / | |||
