(54) СТАНОК ДЛЯ ЗАПЛЕТКЙ КАНАТОВ
двух щек и закрепленного на этих щеках разрезного ролика, а также расположенных на раме против каждой иглы двух полувтулок, смонтированных с возможностью встречно-радиального возвратно-поступательного перемещения.
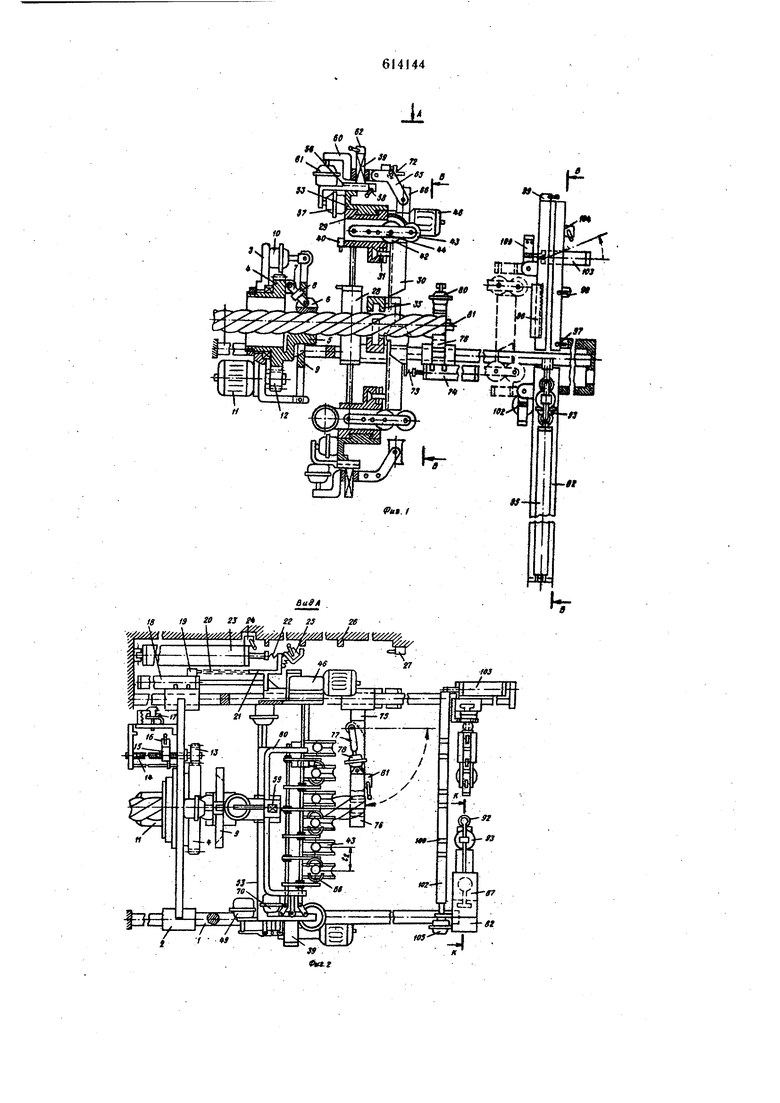
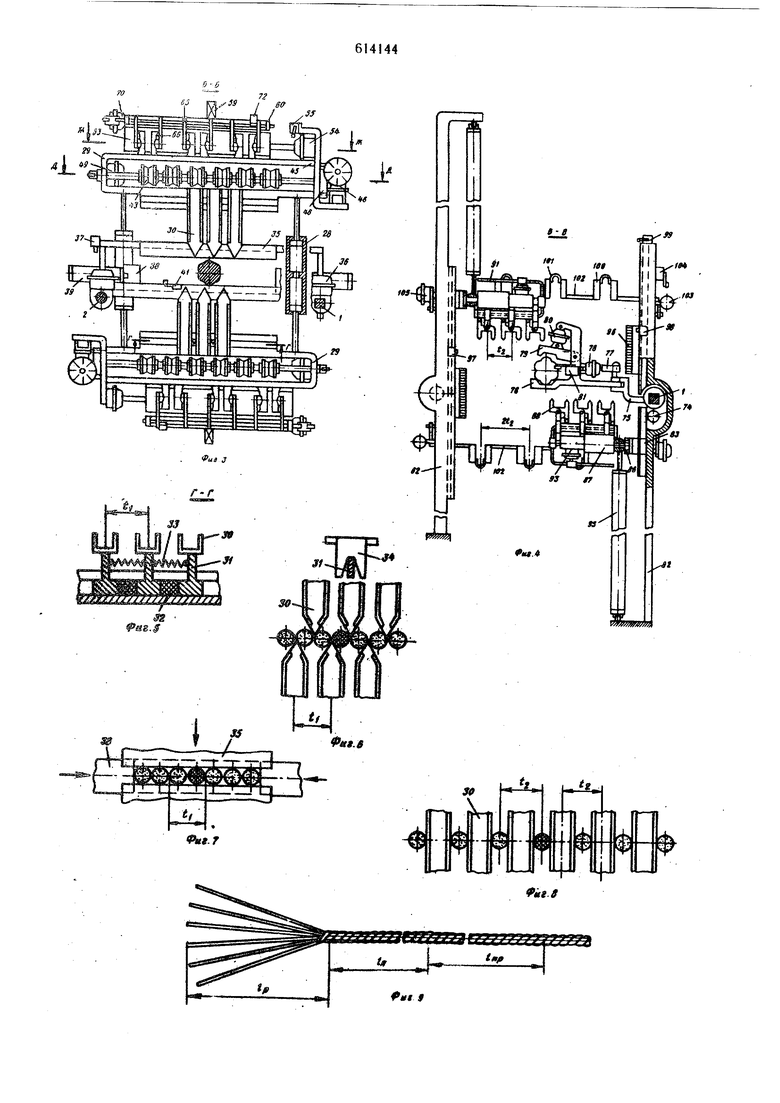
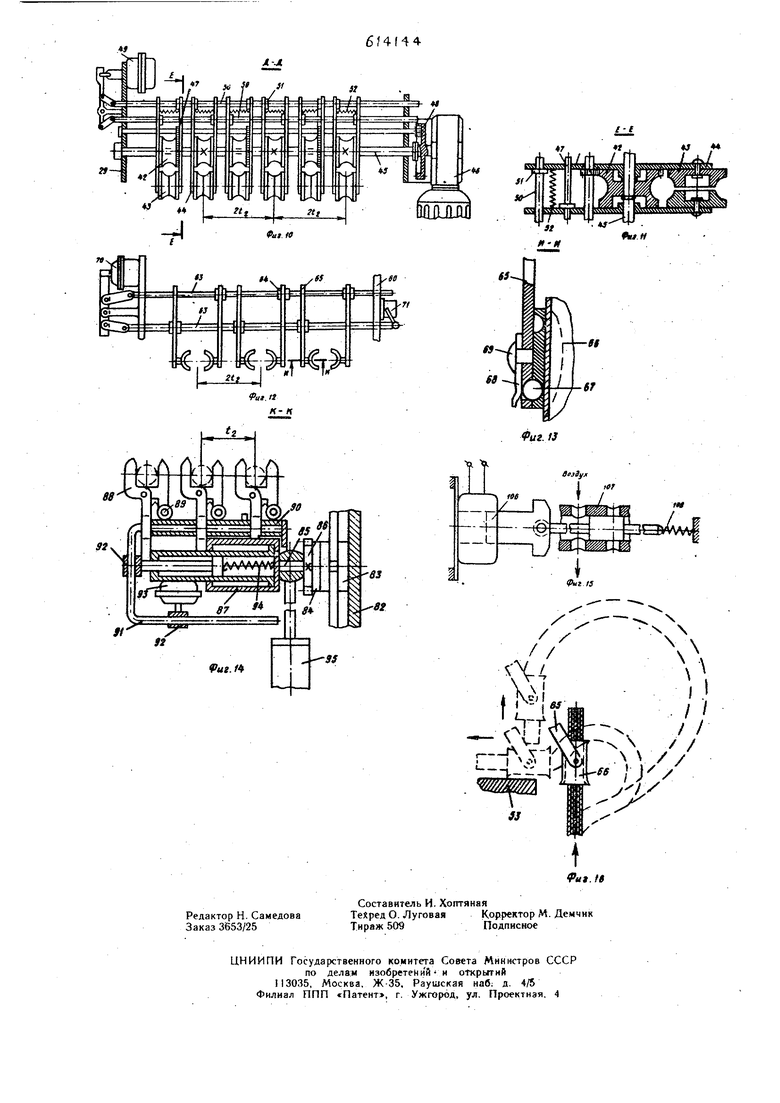
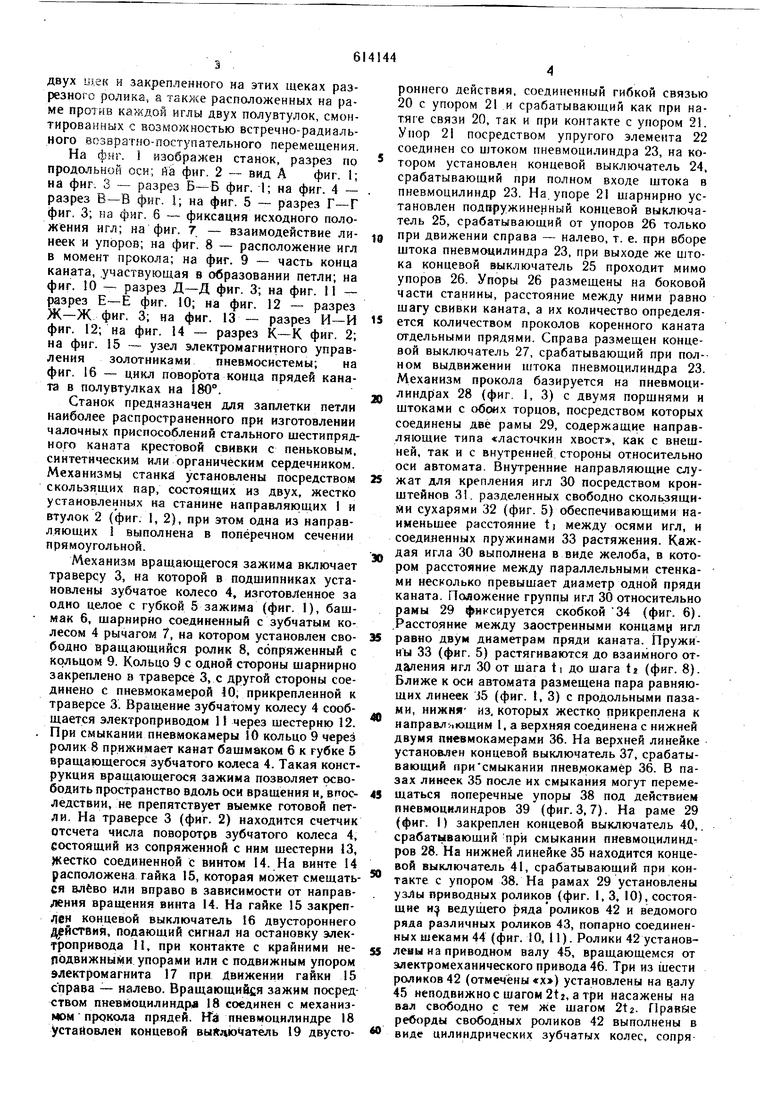
На фиг. i изображен станок, разрез по продольной оси; йа фиг. 2 - вид А фиг. 1; на фиг. 3 - разрез Б-Б фиг. 1; на фиг. 4 - разрез В-В фиг. 1; на фиг. 5 - разрез Г-Г фиг. 3; на фиг. 6 - фиксация исходного положения игл; на фиг. 7 - взаимодействие линеек и упоров; на фиг. 8 - расположение игл в момент прокола; на фиг. 9 - часть конца каната, .участвующая в образовании петли; иа фиг. 10 - разрез Д-Д фиг. 3; на фиг. 11 - разрез Е-Е фиг. 10; на фиг. 12 - разрез Ж-Ж фиг. 3; на фнг. 13 - разрез И-И фиг. 12; на фиг. 14 - разрез фиг. 2; на фиг. 15 - узел электромагнитного управления золотниками пневмосистемы; на фиг. 16 - цикл поворота конца прядей каната в полувтулках на 180°.
Станок предназначен для заплетки петли наиболее распространенного при изготовлении чалочных приспособлений стального шестипрядного каната крестовой свивки с пеньковым, синтетическим или органическим сердечником. Механизмы станка установлены посредством скользящих пар, состоящих из двух, жестко установленных на станине направляк щих 1 и втулок 2 (фиг. 1, 2), при этом одна из направляющих 1 выполнена в поперечном сечении прямоугольной.
Механизм вращающегося зажима включает траверсу 3, иа которой в подшипниках установлены зубчатое колесо 4, изготовленное за одио целое с губкой 5 зажима (фиг. 1), бащмак 6, щарнирно соединенный с зубчатым колесом 4 рычагом 7, на котором установлен свободно вращающийся ролик 8, сопряженный с кольцом 9. Кольцо 9 с одной стороны щарнирно закреплено в траверсе 3, с другой стороны соединено с пневмокамерой 10, прикрепленной к траверсе 3. Вращение зубчатому колесу 4 сообщается электроприводом 11 через шестерню 12. . При смыкании пневмокамеры 10 кольцо 9 через ролик 8 прижимает канат башмаком 6 к губке 5 вращающегося зубчатого колеса 4. Такая конструкция вращающегося зажима позволяет освободить пространство вдоль оси вращения и, впоследствии, не препятствует выемке готовой петли. На траверсе 3 (фиг. 2) находится счетчик отсчета чнсла поворотрв зубчатого колеса 4, состоящий из сопряженной с ним шестерни 13, жестко соединенной с винтом 14. На винте 14 расположена гайка 15, которая может смещать ся влево или вправо в зависимости от направления вращения винта 14. На гайке 15 закр«п/|ен концевой выключатель 16 двустороннего действия, подающий сигнал на остановку электропривода И, при контакте с крайними нелЬдвижны1У1и упорами или с подвижным упором электромагнита 17 при Движении гайки 15 справа - налево. Вращающийся зажим посредством пневмоцилиндрд 18 соединен с механизмом прокола прядей. №i пневмоцилиндре 18 устайовлеи концевой выЛ uoчaтeль 19 двустороннего действия, соединенный гибкой связью 20 с упором 21 и срабатывающий как при натяге связи 20, так и при контакте с упором 21. Упор 21 посредством упругого элемента 22 соединен со штоком пневмоцилиндра 23, на котором установлен концевой выключатель 24, срабатывающий при полном входе щтока в пневмоцилиндр 23. На упоре 21 шарннрио установлен подпружиненный концевой выключатель 25, срабатывающий от упоров 26 только при движении справа - налево, т. е. при вборе штока пневмоцилиндра 23, при выходе же штока концевой выключатель 25 проходит мимо упоров 26. Упоры 26 размещены на боковой части станины, расстояние между ними равно щагу свивки каиата, а их количество определяется количеством проколов коренного каната отдельными прядями. Справа размещен концевой выключатель 27, срабатывающий при полном выдвижении штока пневмоцилиндра 23. Механизм прокола базируется на пневмоцилиндрах 28 (фиг. 1, 3) с двумя поршнями и щтоками с обоих торцов, посредством которых соединены две рамы 29, содержащие направляющие типа «ласточкин хвост, как с внещней, так и с внутренней стороны относительно оси автомата. Внутренние направляющие служат для крепления игл 30 посредством кронштейнов 31, разделенных свободно скользящими сухарями 32 (фиг. 5) обеспечивающими наименьшее расстояние tj между осями игл, и соединенных пружинами 33 растяжения. Каждая игла 30 выполнена в виде желоба, в котором расстояние между параллельными стенками иесколько превышает диаметр одной пряди каната. Положение группы игл 30 относительно рамы 29 фиксируется скобкой 34 (фиг. 6). .Расстояние между заостренными концаму игл равно двум диаметрам пряди каната. Пружины 33 (фнг. 5) растягиваются до взаимного отдаления игл 30 от шага ti до шага tz (фиг. 8). Ближе к оси автомата размещена пара равняющих линеек J5 (фиг. 1, 3) с продольными пазами, нижня из, которых жестко прикреплена к направляющим 1, а верхняя соединена с нижней двумя пневмокамерами 36. На верхней линейке установлен концевой выключатель 37, срабатывающий присмыкании пневмокамер 36. В пазах линеек 35 после нх смыкания могут перемещаться поперечные упоры 38 под действием пневмоцнлиндров 39 (фиг. 3,7). На раме 29 (фиг. I) закреплен концевой выключатель 40,. срабатывающий при смыкании пневмоцилиид ров 28. На нижней линейке 35 находится концевой выключатель 41, срабатывающий при контакте с упором 38. На рамах 29 установлены узЛы приводных роликов (фиг. 1, 3, 10), состоящие и:| ведущего рядароликов 42 и ведомого ряда различных роликов 43, попарно соединенных шекамн 44 (фиг. 10, 11). Ролики 42 установлены на приводном валу 45, вращающемся от электромеханического привода 46. Три из шести роликов 42 (отмечены «х) установлены на в.алу 45 неподвижное шагом 2t2, а три насажены на ва.я свободно с тем же шагом 2t2. Правые реборды свободных роликов 42 выполнены в вид цилиндрических зубчатых колес, сопряженных с шестернями 47, вал которых уста новлен параллельно валу 45 и приводится во вращение от цилиндрического зубчатого колеса 48 с внутренним зацеплением. Таким образом, при одностороннем вращении приводного вала 45 ролики 42, через один, вращаются в разных направлениях. Профили образующих поверхностей роликов 42 и 43 обусловлены диаметром одной пряди, каната, которая; находясь между ними, при вращении ролика 42 получает перемещение, вдоль собственной оси. Разрезные ролики 43, расположенные в ряду кратно расстоянию 2t2 могут одновременно размыкаться в осевом направлении, при этом размер зазора между их дисками будет несколько больик диаметра о/1ной пряди каната. Приводом для их размыкания служит пневмокамера 49 двустороннего действия с нормальным положением диафрагмы в плоскскти стыкующих крыщек. Размыкание осуществляется посредством рычажной системы и двух тяг 50, на которых жестко посажены бочки 51. Щеки 44 свободно насажены на тяги 50 и попарно соединены пружинами 52. При смещении щтока пневмокамеры 49, например влево, верхняя тяга 50 переместится влево, анижняя - вправо и произойдет размыкание роликов 43, расположенных против роликов 42 (обозначенных «X). При противоположном срабатывании пневмокамеры 49 разомкнутся ролики 43 напротив роликов 42 с зубчатыми ребордами. Посадка роликов 42 иа валу 45 в верхней и иижней рамах 29 относительно оси автомата (фиг. 3) произведена в щахматном порядке, т. е. иапротив неподвижных роликов 42 верхней рамы по вертикали установлены ролики с зубчатыми ребордами в нижней раме 29. На внещней направляющей рамы 29 (фиг. ) установлен ползун 53, перемещающийся вдоль рамы 29 по ходу пневмокамеры 54 (фиг. 3), над которой размещен концевой выключатель 55, срабатывающий при подходе к нему ползуна 53. На верхней кромке ползуна 53 (фиг. I) в такой же направляющей типа «ласточкин хвост установлен столик 56, перемещаю ющийся перпендикулярно движению ползуна 53 по ходу пневмокамеры 57, В торце столика 56 находится концевой выключатель 58, срабатывающий при подходе к верхней кромке ползуна 53, На столике 56 жестко установлен штырь 59 прямоугольного сечения, представляющий вертикальную направляющую для П-образной рамы 60 (фиг. 1,2), которая может перемещаться по штырю 59 по ходу пневмокамеры 61. На щтыре. 59 установлен концевой выключатель 62 (фиг. 1), срабатывающий при выдвижении штока пневмокамеры 61. П-образная рама 60 содержит узел полувтулок (фиг. 12), состоящий из двух тяг 63, на которых посредством втулок 64 жестко закреплены щеки 65, изогнутые в профиле (фиг. 1). На концах щек 65 (фиг. 12) присоединены полувтулки 66 через шариковые фиксаторы. Фиксаторы содержат две сферические выемки (фиг. 13), в одной из которых находится шарик 67, наполовину сопряженный с отверстием в щеке 65 и подпружиненный Т1ластинчатой пружиной 68.
Шариковый фиксатор срабатывает при повороте полувтулки 66 на 180° относительно про. дольной оси щеки 65 вокруг оси пальца 69, т. е. фиксирует .только вертикальные положения полуйтулки 66. Тяги 63 могут иметь только осевое смещение, сообщаемое им через систему рычагов пневмокамерой 70, при выходе щтока которой верхняя тяга 63 переместится влево, а нижняя - вправо, что приводит к смыканию полувтулки 66 и к срабатыванию кон
цевого выключателя 71, размещенного на боковой стенке П-образной рамЫ 60. На одной из щек 65 установлен концевой выключатель 72 (фиг. 1,3), срабатывающий при нажатии снизу на его горизонтальную полку.
Механизм прокола посредством упругого
элемента 73 и пневмоцилиндра 74 (фиг. ,1) соединен с механизмом неподвижного зажима. Кроищтейн 75 неподвижного зажима (фиг. 2) установлен на направляющей I прямоугольного сечения, а весь зажим установлен, как консоль к направляющей 1 (фиг. 2, 4) и щарнирно соединен с балкой 76, при этом палец шарнира тягой 77 сопряжен с пневмокамерой 78, которая, срабатывая, может развернуть балку 76 на 90° в горизонтальной плоскости (пунктирная дуга на фиг. 2). К балке 76 (фиг. 4)
щарнирно прикреплен прижим 79, приводимый в работу пневмокамерой 80. На балке 76 (фиг. 2) закреплеи концевой выключатель 81, срабатывающий при нажатии на его ролик слева - направо.
В правом торце станка (фиг. I) размещен
механизм захвата и поворота концов прядей, состоящий из двух направляющих стоек 82 (фиг. I, 4), на внутренних сторонах которых выполнены Т-образные пазы. Т-образный паз правой стойки 82 поперечно.пересечен по месту прохода в нем кронштейна 75. Т-образный паз составляет поступательную пару с ползуном 83, к которому посредством шарикового фиксатора 84 присоединен узел захвата (фиг. 14). Узел захвата базирован на валу 85, жестко соединяющем зубчатое колесо 86, выполненное за одно целое с левой шайбой фиксатора 84, с телескопическим трехступенчатым пневмоцилнндром 87, к каждой ступени которого прикреплена неподвнжнай губка клеще( 88. Подвижные губки клещей 88 шарнирно соедийены с неподвижными губками и оснащены роликами 89, сопряженными с трубкой 90, являющейся телескопическим удлинителем тяги 91. Тяга 91 втулками 92 соединена с концом щтока последней ступени пневмоцилиндра 87 и со штоком пневмокамеры 93. При срабатывании на вх0д щтока пневмокамеры 93 посредством тяги 91 и роликов 89 происходит смыкание клещей 88, у. е. зажатие отдельных прядей каната, указанных пунктиром. При подаче давления воздуха с правого, торца пневмоцилиндра 87 и полном выдвижении трех его ступеней шаг ta между клещами удваивается, т. е. равняется расстоянию 2tt (фиг. 10). При снятии давления с пневмоцилиндра 87 (фиг. 14) клещи 88 возвращаются в исходное положение под действием пружины 94 растяжения. Поступательное движение ползуну 83 сообщается пнёвмоцилиндром 95, прикрепленным к стойке 82 (фиг. 4). К ней же прикреплена зубчатая рейка 96, в зацепление с которой может входить зубчатое колесо 86 по ходу ползуна 83 вдоль Т-образной направляющей стойки 82, поворачиваясь при этом за время прохождения длины рейки на 180°. Клеши верхнего и нижнего узлов захвата развернутся в сторону механизма прокола (фиг. 1, 4) на 180° и зафиксируются в вертикальной плоскости фиксатором 84. На стойках 82 установлены концевые выключатели 97, 98 и 99, срабатывающие при проходе мимо них узла захвата. Поскольку оба узла захвата работают синхронно, то концевые выключатели 97, 98 и 99 не дублируются. Далее, за рейкой 96 по ходу узлов захвата следует узел пружинных держателей (фиг. 1, 4); состоящий из губок 100, попарно соединенных пластинчатыми пружинами 101. Между собой пружинные держатели жестко соединены штангой 102, щарнирно сопряженной со стойками 82. Узел пружинных держателей может разворачиваться вокруг щарнира на 90° из вертикального положения в горизонтальное под действием пневмоцилиндра 103, соединенного шарниром со стойкой 82 и штоком со щтангой 102. При повороте пневмоЦилиндра 103 вокруг щарнира срабатывает концевой выключатель 104, установленный на стойке 82. Зажим отдельных прядей каната в пружинных держателях производится пневмокамерой 105 (фиг. 2), щток которой является частью озтанги 102. Узлы станка, несущие нагрузку, и их базы выполняются металлическими. Все .одноименные узлы механизма прокола и механизма захвата и поворота концов прядей, расположенные сверху и снизу оси станка, работают синхронно. Автоматическое управление пневмоэлектрической схемой осуществляется через концевые выключатели при помощи апектромагнитов 106 (фиг. 15), сопряженных с пневмозолотниками 107, щтоки которых для возврата в ио одное положение оснащены пружинами 108. Станок для заплетки петли каната работает следующим образом. В исходном положении (фиг. 1) вращающийся зажим механизма прокола прядей и неподвижный зажим находятся в левой стороне станка, щтоки всех пневмоприводов втянуты, за исключением пневмоцилиндров 28 и пневмокамер 10 (фиг. 1), 36 и 54 (фиг. 3) и 93 (фиг. 14). Разрезнйе ролики 43 (фиг. 10) сомкнуты, а полувтулки 66 (фиг. 12), клещевые захваты и пружинные держатели (фиг. 4) разомкнуты. Звенья полувтулок 66 относительно губок 100 пружинных держателей (фиг. 2) установлены в плане в щахматном порядке и не препятствуют в дальнейщем сближению трех пружинных держателей с тремя звеньями приводных роликов 43. Наименьшее расстояние между вращающимся и неподвижным зажимами равно одному шагу свивки каната. Подают напряжение в электросеть и воздух в пиевмосистему.. Предварительно очищенный от консервирующей смазки конец каната (фиг. 1) вставляется с левой стороны станка насквозь через открытый вращающийся зажим и механизм прокола в неподвижный зажим, при этом срабатывает концевой выключатель 81, сообщая фупповой сигнал на зажатие конца каната пневмокамерой.80, выдвижение пневмоцйлиндра 74 с неподвижном зажимом и пневмоцилиндра 23 (фиг. 2) на полный ход. При этом пневмокамера 80 значительно опережает по быстроте срабатывания пневмоцилнндры вследствие разницу рабочих объемов. Ход щтока пневмоцилиндра 74 равен длине р (фиг. 9), на которой производится разделка каната на отдельные пряди. В результате суммарного перемещения пневмоцилиндров 74 и 23 неподвижный зажим с концом каната переместится за линию механизма захвата и поворота концов прядей (фиг. этом сработает концевой выключатель 27 (фиг. 2), подающий сигнал на смыкание пневмокамеры 10 (фиг. I) и на включение электропривода 11 для размотки каната на длине 1;о на отдельные пряди. Синхронно размотке перемещается справа- налево гайка 15 (фиг. 2) на счетчике оборотов и при достижении выключателем 16 левого упора, он, срабатывая, дает сигнал на остановку электропривода 11 и смыкание пневмокамер 36 (фиг. 3). Линейки 35 сблизятся до расстояния, равного диаметру одной пряди каната, и уложат разделанные пряди каната и сердечник в горизонтальной плоскости на нижней линейке 35 (фиг. , где сердечник выделен перекрестной щтрнховкой. При сближении линеек 35 сработает концевой выключатель 37 (фиг. 3), по сигналу которого пневмоцилиндры 39 выдвинут упоры 38 и отдельные пряди каната сблизятся до щага 11 (фиг. 7). От контакта с упором 38 (фиг. 3) срабатывает концевой выключатель 41, дающий на размыкание упоров 38 и на смыкание пневмоцилиндрами 28 игл 30, которые подходят к ряду прядей каната (в положении, приведенном на фиг. 6). Поскольку рабочий объем пневмоцилиидров 39 меньще, чем пневмоцилиндров 28, то расхождение упоров 38 опережает смыкание игл 30 (фиг. 3), которые, сомкнувшись, раздвинут пряди каната на шаг t (фиг. 8) и займут положение, указанное пунктиром на фиг. 1. При этом срабатывает концевой выключатель 40, подающий сигнал на выдвижение штоков пневмоцилиндров 95 (фиг. 4) с узлами клещевых захватов. Клещи 88 расположень с тем же щагом tj и при подходе штока пневмоцилиндра 95 к плоскости оси каната, каждый узел клещевых захватов будет сопряжен с тремя прядями каната, а пряди - зажаты клещами 88 посредство л пневмокамеры 93 по сигналу концевого выключателя 97, подающего одновременно сигнал на размыкание прижима 79 пневмонамерой 80. Клещевыми захватами три пряди каната будут увлечены вверх, а три - вниз. Сердечник .каната останется свободным. Далее по ходу клещи 88 развернутся на 180° по рейкам 96. а концевой выключатель 98 даст сигнал на выдвижение ступеней трехступенчатого пневмоцилиндра 87. Концы прядей
в клещах 88 займут положение с шагом 2t в горизонтальной плоскости в направлении, встречном к коренному канату и будут внесены в зев пружинных держаталей. Срабатывает концевой выключатель 99, по сигналу которого пневмокамерой 105 смыкаются губки 100 пружинных держателей, включается привод 46 (фиг. 1), пневмокамерами 93 пряди освобождаются от клещевых захватов, вдвигается щток пневмоцилиндра 103, который поворачивает узел пружинных держателей на 90° (как указано пунктиром на фиг. I) и концы прядей захватываются приводными роликами. При отклонении пневмоцилиндра 103 срабатывает концевой выключатель 104, по сигналу, которого останавливаются приводы 46 пневмокамера 105 (фиг. 2) освобождает пряди от пружинных держателей, возвращаемых пневмоцилиндром 103 в исходное положение. Возвращаются в исходное положение телескопические пневмоцилиндры 87 (фиг. 4) и щтоки пневмоцилиндров 95. Пневмокамера 10 (фиг. 1 освобождает канат от вращающегося зажима, пневмоцилиндрами 28 канат освобождается от игл 30, при этом концы разделанных прядей каната остаются зажатыми между роликами 42 и 43, а эдектропривод 11 по холостому ходу возвращает в исходное положение гайку 15 на счетчике оборотов (фиг. 2). Срабатывает второй контакт концевого выключателя 16 - сигнал на остановку электропривода 11 и на выдвижение щтока пневмоцилиндра 18, длина хода которого в сумме с расстоянием от концевого выключателя 27 до ближнего упора 26 равна длине развернутой петли каната Ц (фиг. 9). При этом длина хода, штока пневмоцилиндра 18 больще расстояния между концевым выключателем 27 и ближним упором 26. При натяжении связи 20 сработает концевой выключатель 19 (фиг. 2) - сигнал на смыкание вращающегося зажима, размыкание линеек 35 (фиг. 3) и разворот балки 76 (фиг. 2) неподвижного зажима на 90° против часовой стрелки пневмокамерой 78, а также смыкание щтока пневмоцилиндра 23 от выключателя 27 до ближнего упора 26, на возврат щтока пневмоцилиндра 74 (фиг. 1) и на смыкание щтока пневмоцилиндра 18 (фиг. 2)..
Часть каната tfj (фиг. 9) переместится вправо за механизм прокола. Срабатывает концевой выключатель 25 (фиг. 2) от крайнего правого упора 26 - сигнал на остановку хода щтока пневмоцилиндра 23 и на. возврат в исходное положение балки 76 пневмокамерой 78, при этом концевой выключатель 81, соприкасаясь -с канатом, сработает и даст сигнал на смыкание прижима 79 пневмокамерой 80. К этому времени полностью сомкнется щток пневмоцилиндра 18 и концевой выключатель 19 сработает от сопряжения с упором 21 - последует сигнал на вращение электропривода 11 и вбор сердечника электромагнита 17. с подвижным упором на счетчике оборотов. До подхода концевого выключателя 16 к подвижному упору электромагнита 17 врашающнйея зажим произведет один оборот, разматывая канат на отдельные пряди по длине одного шага свивки
каната, после чего по сигнялу концевого вык.1и .чателя 1В электропривод И остаионпгся, одновременно сомкнутся линейки 35 пнсвмок; мерани 36 (фиг.. 3),
- Далее повторится вы11кч)писа1 ный никл прокола каната иглами 30 вплоть до момента вклю.чения привода 46. Привод 46 (фиг, 1) сообщает вращение приводным ролмкям 42, и захваченные между ними и разрезными роликами 43 концы прядей каната будут подавать10 ся насквозь через иглы 30 по три сверху и снизу во встречном направлении. Конец одной из нижних прядей нажмет снизу на горизонтальную полку концевого выключателя 72, подающего сигнал на смыкание полувтулок 66 пневмокамерой 70 (фиг. 1, 12) и на размыкание пневмокамерой 49 (фиг. 10) разрезных роликов 43, находящихся напротив роликов 42. обозначенных «х. Пряди каната, находящиеся в звеньях этих роликов, проходя сквозь проемы между разомкнутыми дисками роликов 43, 0 выходят из узла приводных роликов. Ролики 42 с зубчатыми ребордами, расположенные в противолежащей раме 29, продолжают протягивать эти пряди в направлении сомкнутых полувтулок 66 (фиг. 16) до полного смыкания петли каната. В свою очередь, уже сработавший при смыкании полувтулок 66 концевой выключатель 71 (фиг. 12) дает сигнал на перемещение влево столика 56 (фиг.. 1) пневмокамерой 57, при этом полувтулки 66 с концами прядей задевают о нижнюю кромку ползуна 53 ) (фиг. 1, 16), ВЫВОДЯТСЯ с фиксируемого вертикального положения и занимают нефиксируемое горизонтальное положение. Срабатывает концевой выключатель 58 (фиг. 4) и пневмокамера 61 поднимает П-обра.зную раму 60 по щтырю 59. Одновременно по сигналу коицево5 го выключателя 58 происходит возврат слеванаправо столика 56 и, вследствие упругости прядей каната, полувтулки 66 (фиг. 16) будут провернуты прядями против часовой стфелки до второго вертикального фиксируемого положения. Таким образом производится разворот полувтулок 66 с концами прядей каната на 180°. При подъеме П-образной рамы 60 (фиг. 1) концевой выключатель 62 дает сигнал на сдвиг ползуна 53 (фиг. 3) пневмокамерой 54 на расстояние равное шагу tj, между привод5 ными роликами. Срабатывает концевой выключатель 55 - сигнал на опускание П-образной рамы 60 с -полувтулками 66 пневмокамерой 61 (фиг. .1), при этом концы прядей будут поданы В приводные ролики второй группы с шагом 2tj (фиг. ТО). Разрезные ролики 43 после размыкания и выхода из них прядей смыкаются в исходное положение по смежному сигналу концевого выключателя 62 и к моменту последней подачи концов прядей каната уже, сомкнуты. По смежному, сигналу концевого выключателя 55 ойтанавливается привод 46, прекращается враЬхейие приводных роликов, пневмоцилиидры 28 перемещают рамы 29 в исходное положение (фиг. 3), размыкаются линейки 35, освобождается от вращающегося и неподвижного зажимов пяевмокамерами 10 и 80 (фиг. ), фабатывает пневмоцилиндр 23 на вбор штока (фиг. 2) и ca eiltaer всю группу из вращающегося зажима механизма прокола прядей и неподвижного зажима относительно каната справа-налево до следующего упора 26 на расстояние, равное шагу CBMSXI каната. Снова срабатывает концевой -еыгсяючатель 25 и цнкл прокола повторится. По окончаний циклов прокола коренного каната отдельными прядями при полном вборе иггока оневмоцилиндра 23, по сигналу концевого вызсяючателя 24 станок отключается от электрической и воздушной сетей питания при исходное положении всех узлов н механнзмов. К этому време 8н длнна разделанных прядей каната израсходуется на переплетение через проходную часть коренного каната 1 вр (фиг. 9). Заплетенная петля выннмается нз стакана между гуОкой 5 и башмаком б вращающегося зажима (фиг. 1) в горнзонтальной плоскостн. Удаляется свободный кусок неметаллнческого сердечника. В дальнейшем петля подлежит операциям калнбровкн и оплетки. Фоомула изобретения . Станок для заплетки канатов, содержащий установленные последовательно по оси подачи каната на станине и кинематически связаннее между собой вращающийся зажим, механизм прокола прядей и неподвижный зажим, отличающийся тем, что, с целью повышения механизации он снабжен размещенными между вращающимся зажимом и механизмом прокола прядей равняющнми линейками с прижимными поперечными упорами, смонтированным со свободной стороны неподвижного зажима механизмом захвата и поворота концов лрядей и расположенным параллельно вращаю щемуся зажиму механизмом шагового перемещения каната, а также установленным на вращающемся зажиме счетчиком оборотов, при этом неподвижный зажим установлен консоль ю с возможностью поворота в горизонтальной плоскости. 2.Станок по п. 1, отличающийся тем, что механизм захвата И поворота концов прядей выполнен в виде двух вертикальных направляющих, щарнирно закрепленных на каждой направляющей с возможностью поворота в вертнкальной плоскостн пружинных держателей и двух узлов захвата, каждый нз которых смонтирован в соответствующей ему направляющей с возможностью возвратно-поступательного перемещения н выполнен в виде телескопического силового цилиндра и расположенных иа каждой его ступени клещей. 3.Станок по п. I, отличающийся тем, что механнзм шагового перемещения каната выполнен в виде закрепленного на вращающемся зажнме силового цилиндра, шток которого соединен с механизмом прокола прядей, и дополнительного снлового цилиндра, установленного на станнне параллельно основному н упруго связанного своим штоком со штоком основного цилиндра. 4.Станок по п. 1, отличающийся тем, что механизм прокола прядей выполнен в виде двух узлов прокола, расположенных по разные стороны от осн подачи каната с возможностью возвратно-поступательного перемещения перпендикулярно этой осн, при этом каждый узел прокола выполнен в виде рамы, установленных в ней игл н приводного вала с роликами, смонтированных на каждом ролике двух щек и закрепленного на этих щеках разрезного ролика, а также расположенных нараме против каждой иглы двух полувтулок, смонтированных с возможностью встречно-радиального возвратно-поступательного перемещения. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 234185, Кл. D 07 В 7/16, 1967.
ВавЛ
IS 13 ia 13 гг ге
/J fi7
H
I
f
t
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель хода грузового троса | 1980 |
|
SU933629A1 |
| Способ изготовления обрезиненного кордного полотна и устройство для его осуществления | 1977 |
|
SU736866A3 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ВРЕМЕННОЙ ПОДВЕСКИ ОБОЖЖЕННЫХ АНОДОВ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 1973 |
|
SU406951A1 |
| Машина для литья под давлениемАРМиРОВАННыХ издЕлий | 1979 |
|
SU821176A1 |
| Полуавтоматическая сборочная линия | 1982 |
|
SU1115886A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Аппарат для сшивания кровеносных сосудов и нервов металлическими П-образными скобками | 1958 |
|
SU127361A1 |
| Машина для литья под давлением отливок, армированных многожильным канатом | 1976 |
|
SU747616A1 |
| Устройство для кантования | 1981 |
|
SU994371A1 |
| Установка для восстановления упругости пружин | 1977 |
|
SU740842A1 |