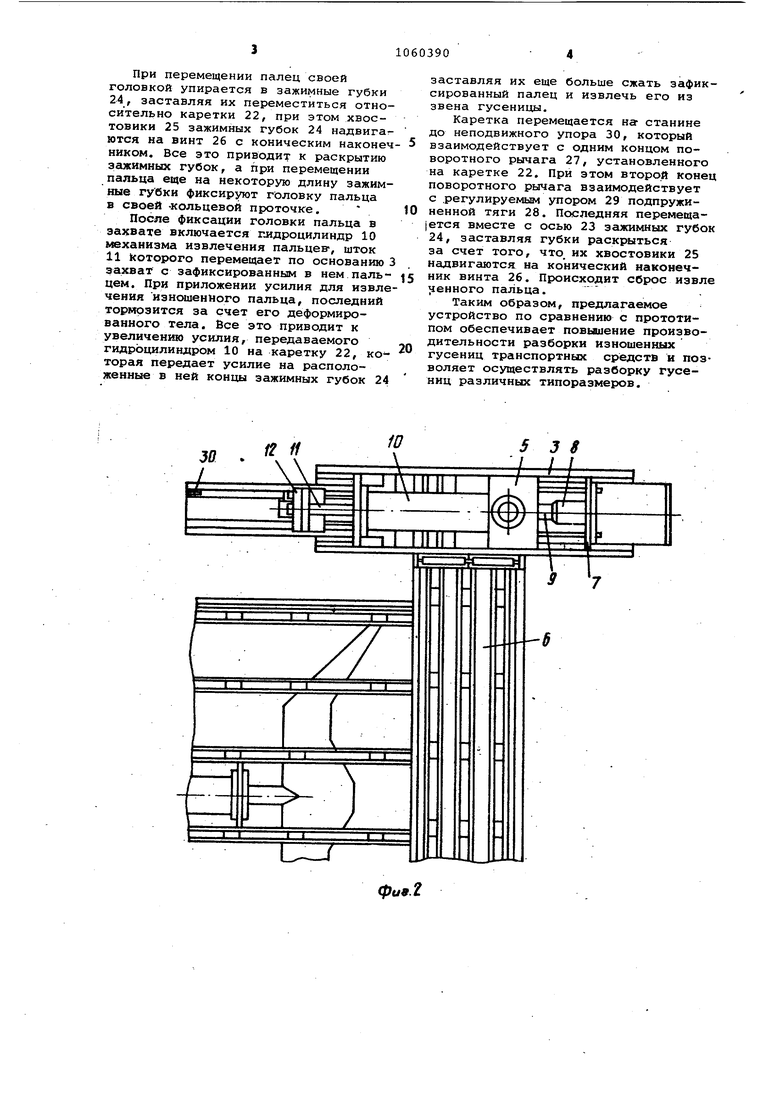
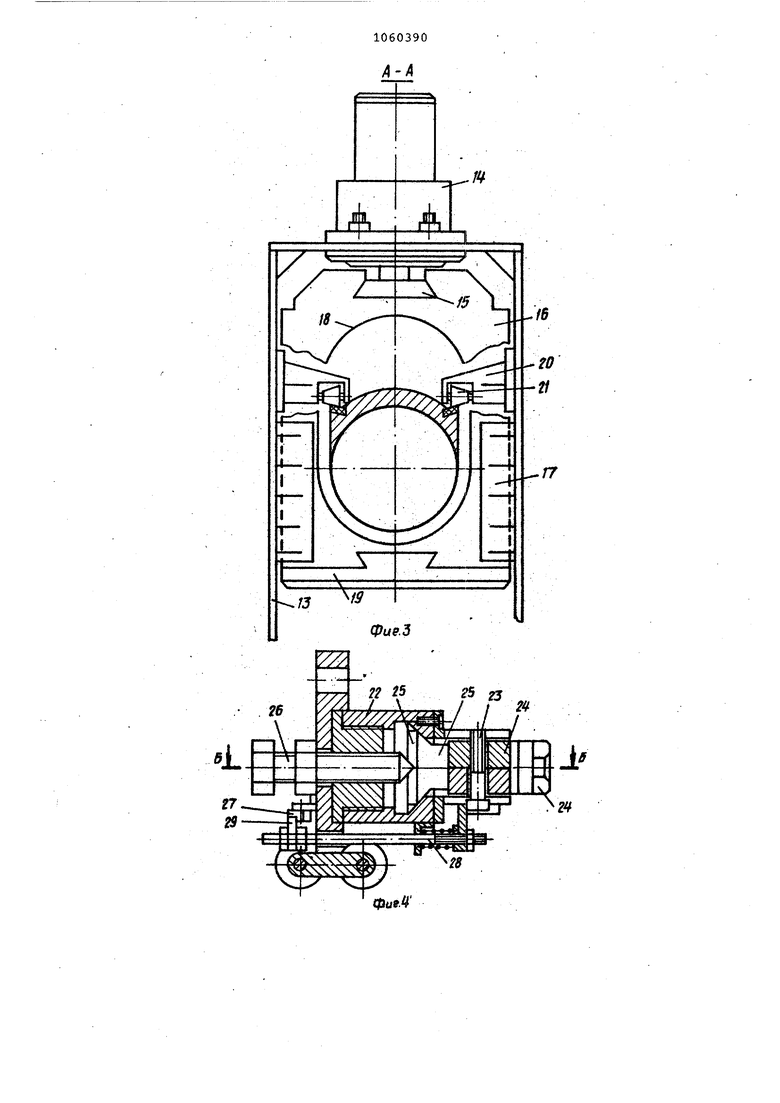
Изобретение относится к машиностроению и может быть использовано для разборки изношенных и деформиро ванных гусениц транспортных средств Известно устройство для удаления изношенных соединительных пальцев звеньев гусениц транспортных средст содержащее смонтированные на основа нии стол с механизмом фиксации демо тируемого звена гусеницы, шаговый транспортер для подачи звеньев на стол, механизм предварительной выпрессовки пальцев и механизм извлечения пальцев, выполненный в виде гидроцилиндра, на штоке которого закреплен ёахват ij . Однако данное устройство обеспечивает недостаточно высокую произво дительность разборки изношенных гус ниц. . . Целью изобретения является повышение производительности. Поставленная цель достигается тем, что. в устройстве для удаления изношенных соединительных пальцев звеньев гусениц транспортных средст содержащем смонтированные на основа нии стол с механизмом фиксации демонтируемого звена гусеницы, шаго вый транспортер для подачи звеньев стол, механизм предварительной выпрессовки пальцев и механизм извлечения пальцев, выполненный в виде гидроцилиндра, на штоке которого закрепле.н захват, последний выполне в виде закрепленной ра штоке упомянутого гидроцилиндра каретки, в которой смонтированы шарнирно связанные между собой посредством оси .зажимные губки с хвостовиками, винт с коничеоким наконечником, поворотный рычаг и подпружиненная тяга с регулируемым упором на одном конце, закрепленная другим концом на оси зажимных губок, при этом зажимные губки установлены в каретке с возмо ностью продольного возвратно-поступательного перемещения и взаимодействия своими хвостовиками с коничес КИМ наконечником винта, основание выполнено с неподвижным упором, а каретка установлена на основании с возможностью взаимодействия одним концом поворотного рычага с неподви ным упором основания, а другим - с регулируемым упором подпружиненной тяги. На фиг. 1 изобр.ажено устройство для удаления изношенных пальцев звеньев гусениц транспортных средст на фиг. 2 - то же, вид в плане, на фиг. 3 - то же, сечение А-А на фиг. 1; на фиг. 4 - захват пальцев; на фиг. 5 - то же, сечение Б-Б на фиг. 4, на фиг. 6 - то же, вид В на фиг. 5; на фиг. 7 - начальный момент удаления изношенного пальца. Устройство для удаления изношенных соединительных пальцев 1 звеньев 2 гусениц содержит основание 3, на котором смонтированы стол 4 с механизмом фиксации 5 демонтируемого звена гусеницы, шаговый транспортер 6 для подачи веньев на стол 4, механизм предварительной выпрёссовки пальца в виде силового гидроцилиндра 7, на штоке 8 которого закреплен толкатель 9, а также механизм извлечения пальцев в виде гидроцилиндра 10, на штоке 11 которого смонтирован захват 12. Механизм фиксации 5 демонтируемого звена гусеницы содержит закрепленный на основании 3 корпус 13, в котором перпендикулярно оси пальцев установлен гидроцилиндр 14 с закрепленной на его штоке 15 кулисой 16, перемещающейся в направл.яющих 17 корпуса 13. Кулиса 16 выполнена с эллипсообразным вырезом 18 и связана с башмаком 19. На стенках корпуса 13 закреплены кронштейны 20 с коническими роликами 21. Захват 12 выполнен в виде закрепленной на штоке 11 установленного на основании 3 гидроцилиндра 10 каретки 22, в которой смонтированы щарнирно связанные между собой посредством оси 23 зажимные губки 24 с хвостовиками 25, винт 26 с коническим наконечником, поворотный рычаг 27 и подпружиненная тяга 28. Подпружиненная тяга 28 закреплена одним концом на оси 23 зажимных губок 24, а на . втором.конце имеет регулируемый упор 29. Основание 3 выполнено с неподвижным упором 30, а каретка 22 установлена на основании с возможностью возвратно-поступательного перемещения и взаимодействия одним концом поворотного рычага 27 с неподвижным упором 30, а другим - с регулируемым упором 29 подпружиненной тяги 28. Устройство работает следующим образом. Дембнтируемое звено гусеницы посредством шагового транспортера 6 подается на рабочую поверхность стола 4 с определенным шагом. Шаг подачи регулируется при помощи бесконтактных концевых выключателей. После размещения демонтируемого звена на столе включается механизм фиксации 5, который башмаком 19 фиксирует звено. Механизм фиксацииимеет возможность регулировки в зависимости от типоразмера звеньев гусениц. После осуществления фиксации включается механизм предварительной выпрёссовки пальца, толкатель 9 силового гидроцилиндра 7 которого взаимодействует с демонтируемым пальцем 1 и сообщает ему поступательное перемещение относительно звена-2,
При перемещении палец своей головкой упирается в зажимные губки 24, заставляя их переместиться относительно каретки 22, при этом хвостовики 25 зажимных губок 24 надвига ются на винт 26 с коническим наконеч НИКОМ. Все это приводит к раскрытию зажимных губок, а при перемещении пальца еще на некоторую длину зажимные губки фиксируют головку пальца в своей -кольцевой проточке.
После фиксации головки пальца в захвате включается глдроцилиндр 10 механизма извлечения пальцев-, шток 11 Которого перемещает по основанию 3 захват с зафиксированным в нем пальцем. При приложении усилия для извлечения изнсииенного пальца, последний тормозится за счет его деформированного тела. Все это приводит к увеличению усилия, передаваемого гидроцилиндром 10 на каретку 22, которая передает усилие на расположенные в ней концы зажимных губок 24
заставляя их еще больше сжать зафиксированный палец и извлечь его из звена гусеницы.
Каретка перемещается на- станине до неподвижного упора 30, который взаимодействует с одним концом поворотного рычага 27, установленного на каретке 22. При этом второй конец поворотного рычага взаимодействует с регулируемым упором 29 подпружиненной тяги 28. Последняя перемеща|ется вместе с осью 23 зажимных губок 24, заставляя губки раскрыться за счет того, что их хвостовики 25 надвигаются на конический наконечник винта 26. Происходит сброс извле ченного пальца.
Таким образом, предлагаемое устройство по сравнению с прототипом обеспечивает повышение производительности разборки изношенных гусениц транспортных средств и позволяет осуществлять разборку гусениц различных типоразмеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для разборки гусеничных лент | 1988 |
|
SU1585104A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Механизм подачи прокатного стана | 1986 |
|
SU1342553A1 |
| Загрузочное устройство | 1985 |
|
SU1328146A1 |
| Станок для сборки деталей и клепки | 1974 |
|
SU519266A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ДЕТАЛИ | 1991 |
|
RU2016370C1 |
| Захватное устройство | 1985 |
|
SU1263525A1 |
| Модуль для автоматизированной листовой штамповки | 1989 |
|
SU1708477A1 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |

УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ИЗНОШЕННЫХ СОЕДИНИТЕЛЬНЫХ ПАЛЬЦЕВ ЗВЕНЬЕВ ГУСЕНИЦ ТРАНСПОРТНЫХ СРЕДСТВ, содержащее смонтированные на основании стол с механизмом фиксации демон тируемого эвена гусеницы, шаговый трансдрртер для подачи звеньев на стол, механизм предварительной выпре совки пальцев и механизм извлечения пальцев, выполненный в виде гидроцилиндра, на штоке которого закреплен захват, отличающееся тем, что, с целью повышения производитель / / / / f Ч-J J ности, захват выполнен в виде закрепленной на штоке упомянутого гидроцилиндра каретки, в которой смонтированы шарнирно связанные собой . посредством оси зажимные губки с хвостовиками, винт с коническим наконечником, поворотный рычаг и подпружиненная тяг.а с регулируемым упором на одном конце, закрепленная другим концом на оси зажимных губок, при этом зажимныегубки установлены в Каретке с возможностью продольного возвратно-поступательного перемещения и взаимодействия хвостовиками с , коническим наконе й иком винта, основание выполнено с неподвилсным упором а каретка установлена на основании с возможностью взаимодействия одним концом поворотного рычага с неподвижным упором основания, а другим с регулируемым упором подпружиненной тяги.
L.f 5 J
(pu9.2 #
бВ
25 0
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомат для разборки гусеничной цепи | 1975 |
|
SU560727A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
