И (опретенио относится к станкостроению, ;i именно к устройствам автоматической о|)иоитаиии и (агрузки роторных автоматов ппумными и.ле, 1иями типа тел вращения, имеющих переменное сечение и не поддающихся нако11.1енин) в вертикальной трубке, нанример гне(д и штырей : лектрических соедини le/ien.
IliMbK) изобретения является повышение ||;ш жности в )аботе роторного автомата : И1;мп1я lyreM иск.1К)чения заклинивания при 11()1Н1учной подаче в накопители деталей iHiia I иезд и п1Т1,рей электрических 1 оеди нителе11.
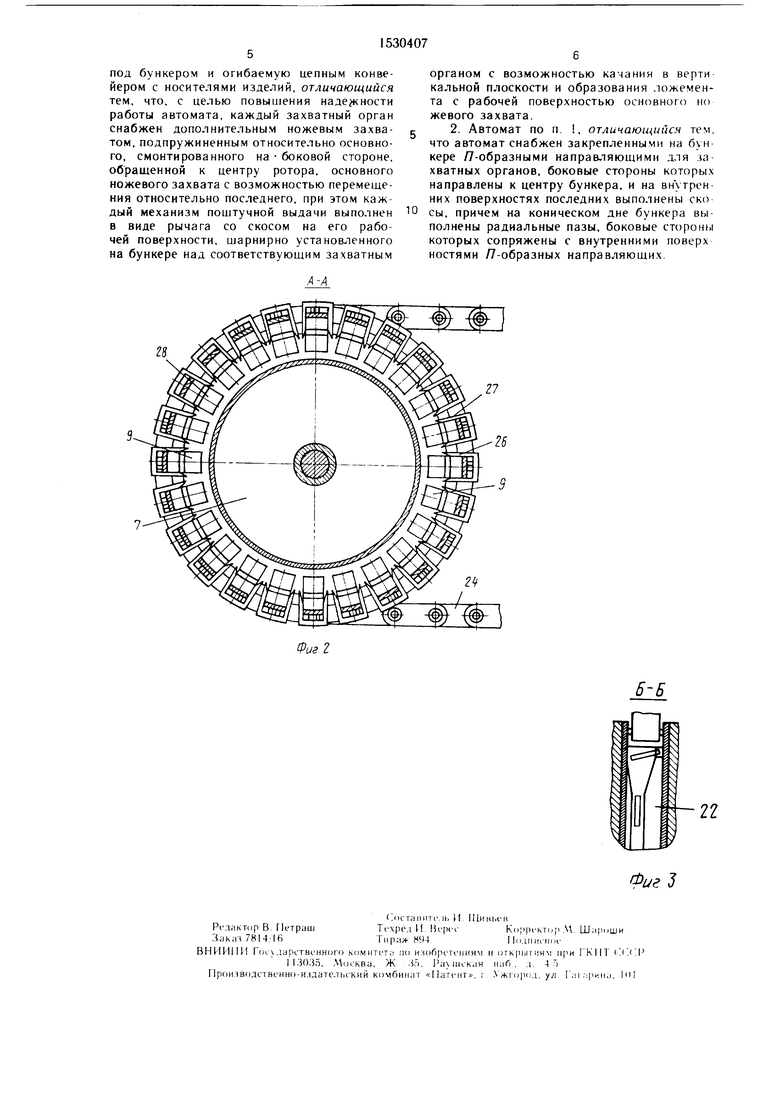
Па фиг. 1 изображен роторный авто- Mai Н1гга1 ия, обн1ий вид, продольный разрез; на фиг 2 разрез А Л па фиг. 1; -, фн. Л разрез Б Б на фиг. 1.
Роторный автомат питания содержит осно- напие 1, па KOTOJIOM .ак)ег1лен предбункер 2, нал Л. на котором смонтированы барабаны 4 с приводными ползунами 5, бункер 6
Iконическим дпом 7 для храпения запаса не()риептнровапн1)1 дета.чей 8 и с прямо- 1 ().1ьными радиальными паза.ми 9, число ко- юрыч соответствует чпслу позиций ротора. И каждом пазу параллельно оси ротора I а нон. 1ены и закреп.1ены .захватные орга- ньг Кажд|)1Й .(ахватпый орган выполпеп в nii.u ножевого .захвата 10, связанного с по,т- нами Г) пос)1едством вилки II. На рабочей 41 :церхмосгн Ножевою захвата 10 выполнен скос 12 iiapa.i.ie.ibHo образуюпгой коническо- io uia пупкера Н. На боковой поверх- N01 гн ноженого захвата 10 смоптировап 11о.1пр жипенньп огносительно последнего |||1 жпной ЬЧ дополнительный ножевой за- хиат 14 со скосом 15 на его рабочей по- нерхпосги. Лоно,тпнте,1ьн1)1Й ножевой за- xnai 14 сганов.им1 с возможностью пере- мс-шс-ния совмесгпо с основным захватом 10
IIо 1 Mill ите.п.ного 11е)емеп1епия вдоль пос.тедЧего.
Иа.1 «ахиагными opianaMn расположепы Механизмы нопггучно) В1 |дачи, чис, 1О кото- ко.шчеству захватп1 1Х органов. Г| MexaHH.iM поштучной выдачи вьню.ь ии.и рычага Hi со скосом 17 на его i поиерхностн.
К,1/ ibiii рыча И) niapnnpno устаповлен )11кере ( с возможностью качания в иакл ihiioii и.юскости на осп 18, закреп- пюи на оупкере В, при взаимодейст I г к,1ачком И). зак|1еп,1енны | на основа- I i (.KOI- 17 рь1чага IB со скосом 12 10ИМ11ГО чоженого захвата 10 образу 20 Д.1Я одной дега.:и. 11е- I i.,. К.чым ножевым захватом 10 на бун- I . и()()наны накопители 21, в верх- ч,;- III коюрых смоптированы (лемепты 22 I liioH орнен 1 ацин. Под бункером 6 смон- iMiia (iie3.ui4Ka 2. 1 огибаемая цепным 24 с носите,тямн 25 дета, 1ей.
iiar4i,ie уста 1(()в, в П-образ- рав. 1НКМЦПХ 2Н, боковые сторопы 27
5
которых направлены к центру бункера, а на внутренних поверхностях выполнены скосы 28 для выравнивания изделий вдоль захватного органа. На коническом дне бункеpa боковые стороны радиальных пазов 9 совмещены с внутренними боковыми поверхностями П-образных направляющих 26.
Роторный автомат работает следующим образом.
В процессе вращения вала 3 с бункером 6 и барабаном 4 от привода (не пока- зап) ротор получает вращательное движение, в результате которого насыпанные навалом детали 8 по коническому дну 7 бункера 6 по радиальным пазам 9 скользят к скосам 15 и 12 соответственно дополнительного 14 и основного 10 ножевых захватов. Основной 10 и дополнительный 14 ножевые захваты совер1пают совместное возвратно-поступательное перемещение параллельно оси вала 3 вдоль П-образных направляющих 26
0 от ползунов 5.
В процессе совместного движения ножевых захватов 10 и 14 детали 8, находящиеся на скосах 15 и 1 2 ножевых захватов 14 и 10, выравниваются на П-образных направляющих 26, последовательно взаимодействуя со скосами 28, расположенными на внутренних боковых сторонах 27 П-образных направляющих 26. При совместном движении вверх ножевых захватов 10 и 14 допол- нителы{ый ножевой захват 14 своим выступом 29 упирается в ограничитель хода и останавливается, а ножевой захват 10 продолжает движение вверх, поднимая одну или две детали, лежащие одна на другой на скосе 12, до механизма поштучной выдачи, при этом в ложементе 20, образованном скосом 17 рычага 16 и скосом 12 ножевого захвата 10, остается одна деталь 8. Рычаг 16, взаимодействуя с кулачко.м 19, поворачивается на оси 18, и деталь 8 скатывается к элемента.м 20 вторичной ориентации, где ориентируется вдоль оси накопи- 1еля 21, и далее через накопитель 21 попадает в носитель 25 цепного конвейера 24. Да.1ее цикл повторяется.
t Формула изобретения
5
1. Роторный автомат питания, содержащий вал, смонтированный на основании с В().(можностьк) вращения, бункер с коническим дном и с равномерно размещенными по его периферии захватными орга0 нами, каждый из KOTopijix выполнен в виде |;рямоуго, 1Ы1ого ножевого захвата со скосами на его рабочей поверхности, направленными парал,1ельпо образующей конического дна бункера, и установлен с возможностью возвратно-постунательного перемещения па5 рал.кмьно оси вала, накопители, закрепленные па бункере перед соответствующими захватными органами, механизмы поштучной В1)|дачи и звездочку, закрепленную на валу
0
5
0
под бункером и огибаемую цепным конвейером с носителями изделий, отличающийся тем, что, с целью повышения наде кности работы автомата, каждый захватный орган снабжен дополнительным ножевым захватом, подпружиненным относительно основного, смонтированного на боковой стороне, обращенной к центру ротора, основного ножевого захвата с возможностью перемещения относительно последнего, при этом каждый механизм поштучной выдачи выполнен в виде рычага со скосом на его рабочей поверхности, шарнирно установленного на бункере над соответствующим захватным
А-А
органом с возможностью качании в верти кальной плоскости и образования ложемента с рабочей поверхностью основного но жевого захвата.
2. Автомат по п. , отличающийся тем. что автомат снабжен закрепленными на бункере /7-образными направляющими для на хватных органов, боковые стороны которых направлены к центру бункера, и на внутрен них поверхностях последних выполнены ско сы, причем на коническом дне бункера выполнены радиальные пазы, боковые стороны которых сопряжены с внутренними поверх ностями /7-образных направляющих.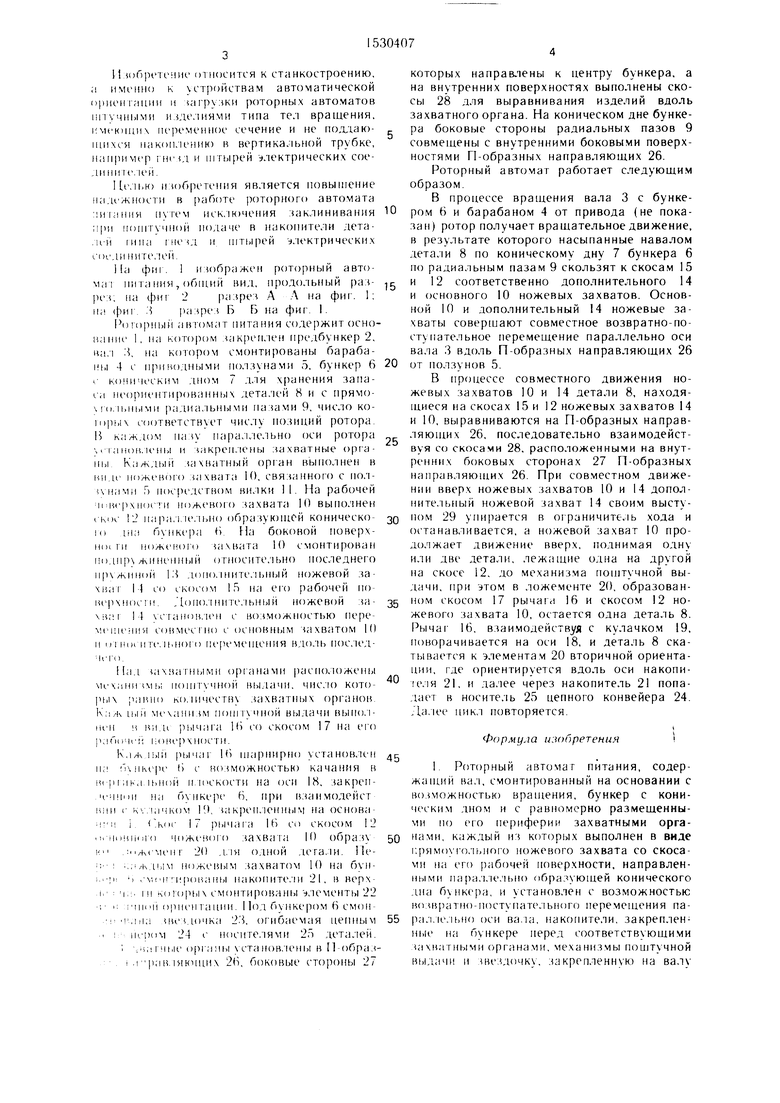
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1754408A1 |
| Загрузочное устройство | 1975 |
|
SU575203A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Элеваторное бункерное загрузочное устройство | 1980 |
|
SU874307A1 |
| Роторный автомат питания | 1987 |
|
SU1491653A1 |
| Роторный автомат питания | 1986 |
|
SU1340982A1 |
| Автоматическое загрузочное устройство | 1986 |
|
SU1368159A1 |
| Загрузочный ротор | 1988 |
|
SU1593904A1 |
| Роторный автомат питания | 1981 |
|
SU994208A1 |
| Роторный автомат питания | 1986 |
|
SU1488179A1 |
Изобретение относится к станкостроению, а именно к устройствам автоматической ориентации и загрузки роторных автоматов штучными изделиями типа тел вращения, имеющими переменное сечение, например гнезд и штырей электрических соединителей. Цель изобретения - повышение надежности роторного автомата питания путем исключения заклинивания при поштучной подаче в накопители деталей типа гнезд и штырей электрических соединителей. Каждый захватный орган выполнен в виде ножевого захвата 10 со скосом 12 на его рабочей поверхности и дополнительного ножевого захвата 14 со скосом 15 на его рабочей поверхности, размещенных с возможностью совместного перемещения параллельно оси вала и перемещения ножевого захвата 10. Каждый механизм поштучной подачи выполнен в виде рычагов 16 со скосом 17 на его рабочей поверхности и установлен с возможностью качания в вертикальной плоскости и образования ложемента 20 для детали 8 со скосом 12 ножевого захвата 10. Ножевые захваты 10 и 14 установлены в П-образных направляющих, закрепленных на бункере, на внутренних боковых поверхностях которых выполнены скосы для выравнивания деталей 8 вдоль ножевых захватов 10 и 14. На коническом дне бункера 6 выполнены радиальные пазы, сопряженные с внутренними поверхностями соответствующих П-образных направляющих. При движении ножевых захватов 10 и 14 вверх детали 8 скосами П-образных направляющих выравниваются и одна деталь 8 попадает в ложементы 20. После поворота рычага 16 деталь попадает к элементам вторичной ориентации и далее через накопитель 21 ориентированная вдоль оси накопителя 21 подается в носитель 25 цепного конвейера 24. 1 з.п. ф-лы, 3 ил.
28
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
