Изобретение относится к подъемно- транспортному оборудованию, в частности к устройствам для подъема тяжеловесных конструкций.
Цель изобретения - расширение области применения путем подъема груза с земли.
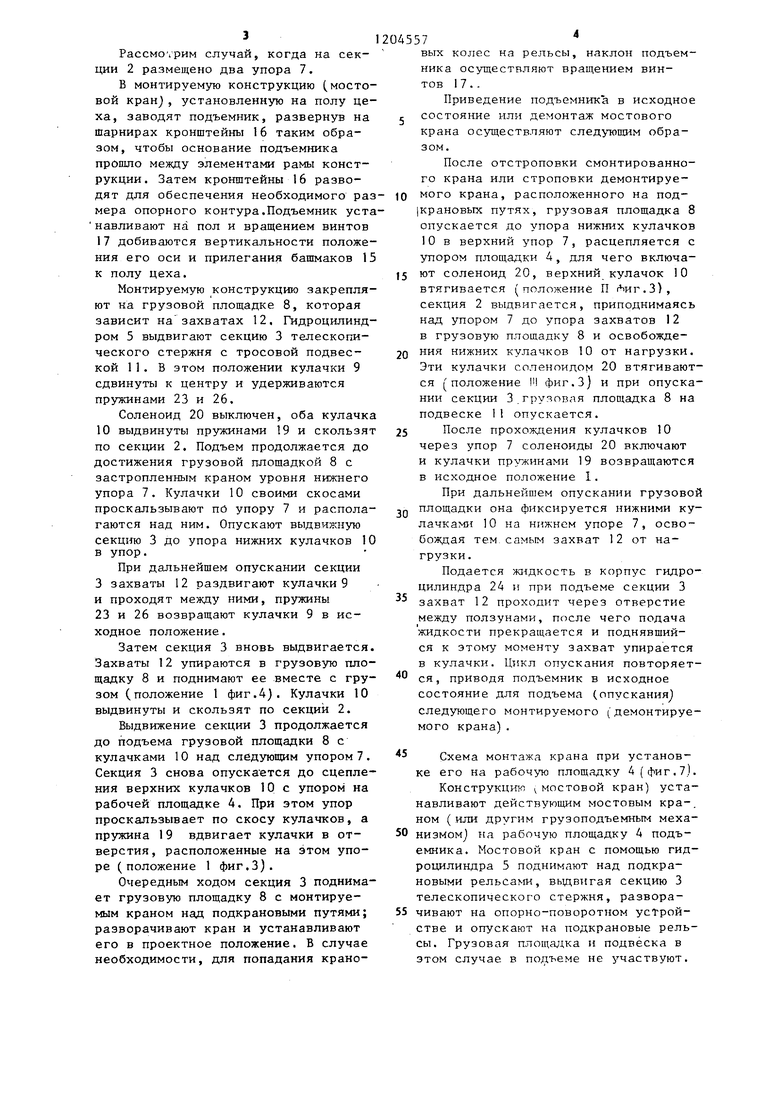
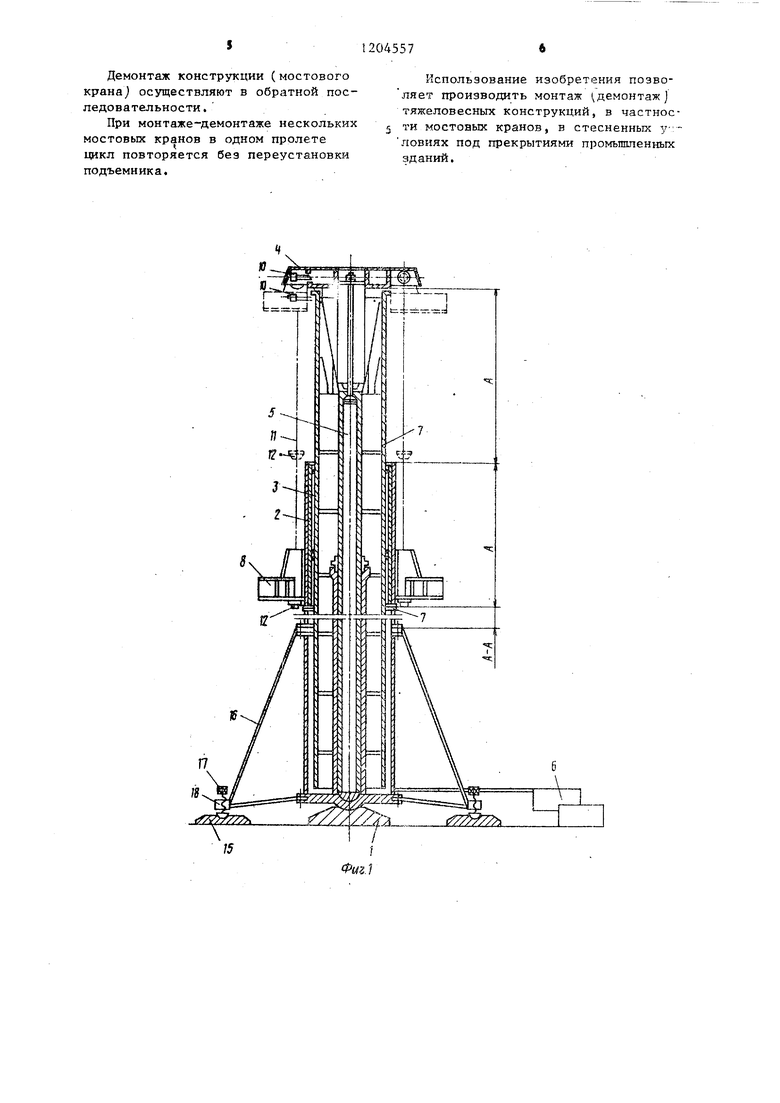
На фиг,1 показан телескогический подъемник, общий вид; на фиг,2 - опорно-поворотная площадка; на фиг.3 конструктивная схема захвата на подвижной рамке; на фиг,4 - конструктивная схема захвата на подвеске в его разных положениях; на фиг.5 - узел ползунов; на фиг,6 и 7 - монтажа мостового крана.
Телескопический подъемник состоит из установленного на опорном: узле 1 телескопического стержня с неподвижной 2 и вьщвижной 3 секциями и закрепленной на последней рабочей площадки 4.
Привод выдвижения секции 3 включает в себя гидроцилиндр 5 и станцию 6 управления.
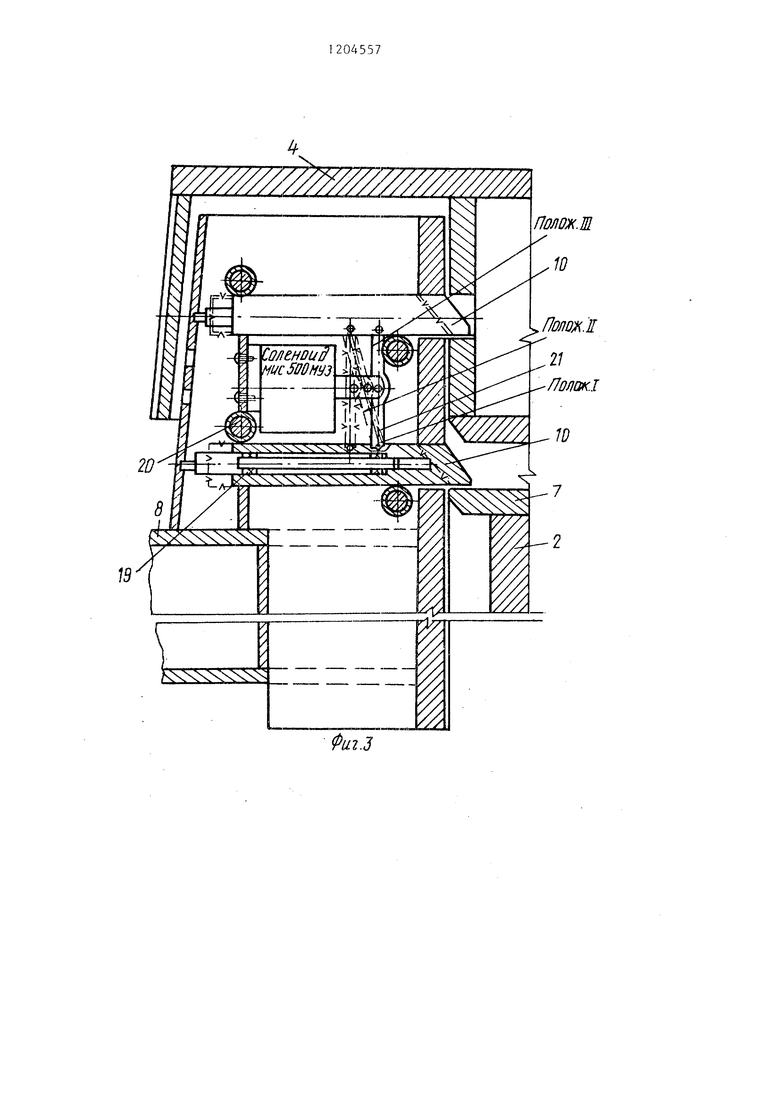
На неподвижной секции по ее высоте размещены упоры 7. По грузоподъемному стержню перемещается грузовая площадка 8, снабженная подщэужинен- ными 9 и управляемыми 10 кулачками.
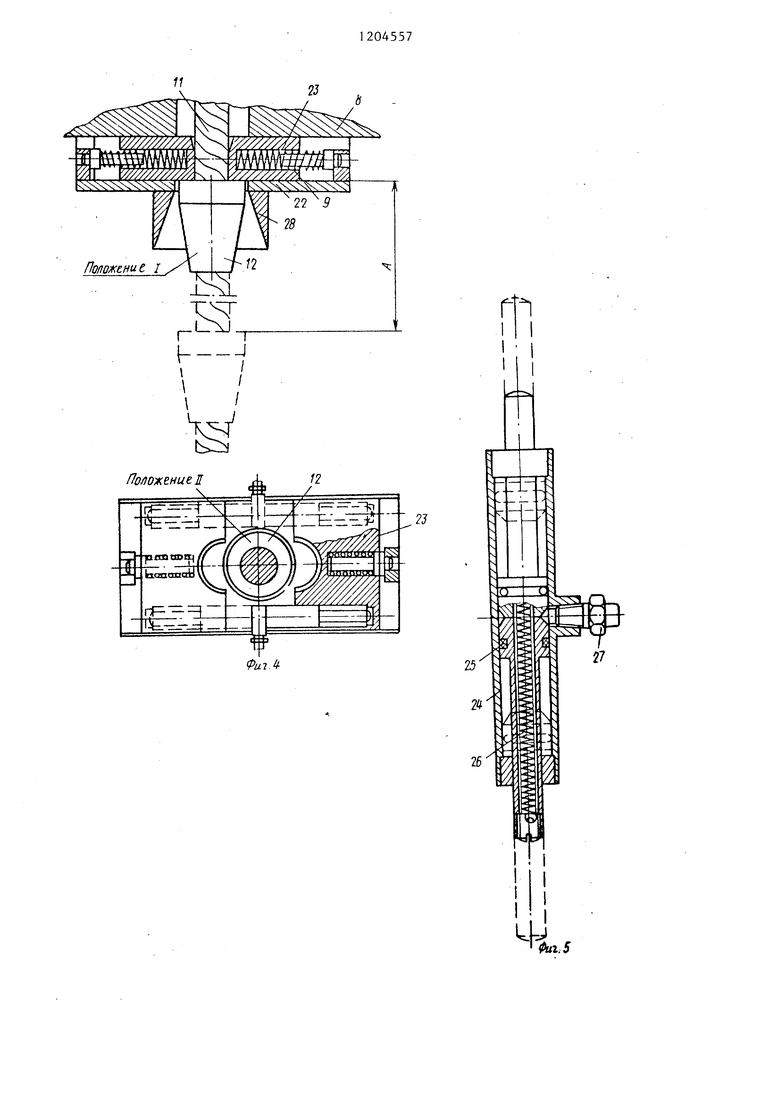
На рабочей площадке 4 размещена тросовая подвеска 11 , /41меющая захваты 1 2.
Для обеспечения поворота рабочей площадки вокруг вертикальной оси последняя установлена на горизонтально-упорный 13 и вертикально-упорный 14 подшипники. Устойчивость подъемника обеспечивается опиранием неподвижной секции 2 на башмаки 15 крон- штейнами 16 посредством винта 17 с
шаровой пятой 18, I
Управляемые кулачки 10 встроены в грузовую площадку 8 и под действи- ем пружины 19 постоянно выдвинуты При подъеме грузовой площадки 8 кулачки автоматически устанавлив,аются при прохождении упоров 7. При опускании они принудительно убираются соленоидом 20 посредством траверсы 21
Грузовая площадка 8 также взаимодействует с захватами 12 тросовой подвески П. На грузовой площадке 8 закреплен корпус 22 подйружиненных кулачков 9, перемещающихся под деист вием пружины 23.
В кулачки 9 вмонтированы корпуса гидроцилиндров 24, в которых переме
3
5
0
0
5 (1
0
щаются по две пары поршней 25, стягиваемых пружиной 26. В корпусы гидроцилиндров жидкость подается через ,штуцер 27. Для взаимодействия с захватами 12 предусмотрена направляющая 28..Неподвижная секция 2 выполнена наборной из вставок длиной не более хода выдвижной секции 3,
При подъеме вьщвижной 3 и прохождении кулачков 10 через упоры 7 они работают в автоматическом режиме. Захваты 12 при прохождении вниз автоматически раздвигают от центра кулачки 9 при взаимодействии с их скошенными поверхностями под действием собственной массы и массы подвески 11. Кулачки 9 возвращаются в исходное положение пружинами 23 и 26. При опускании выдвижной секции и прохождении через упоры 7 кулачки 10 управляются соленоидом 20. Кулачки 9 раздв-игаются от центра при прохождении захватов 12 вверх путем подачи жидкости в корпуса гидроцилиндров 22 и возвращаются в исходное положение пружинами 23 и 26 при прекращении подачи жидкости.
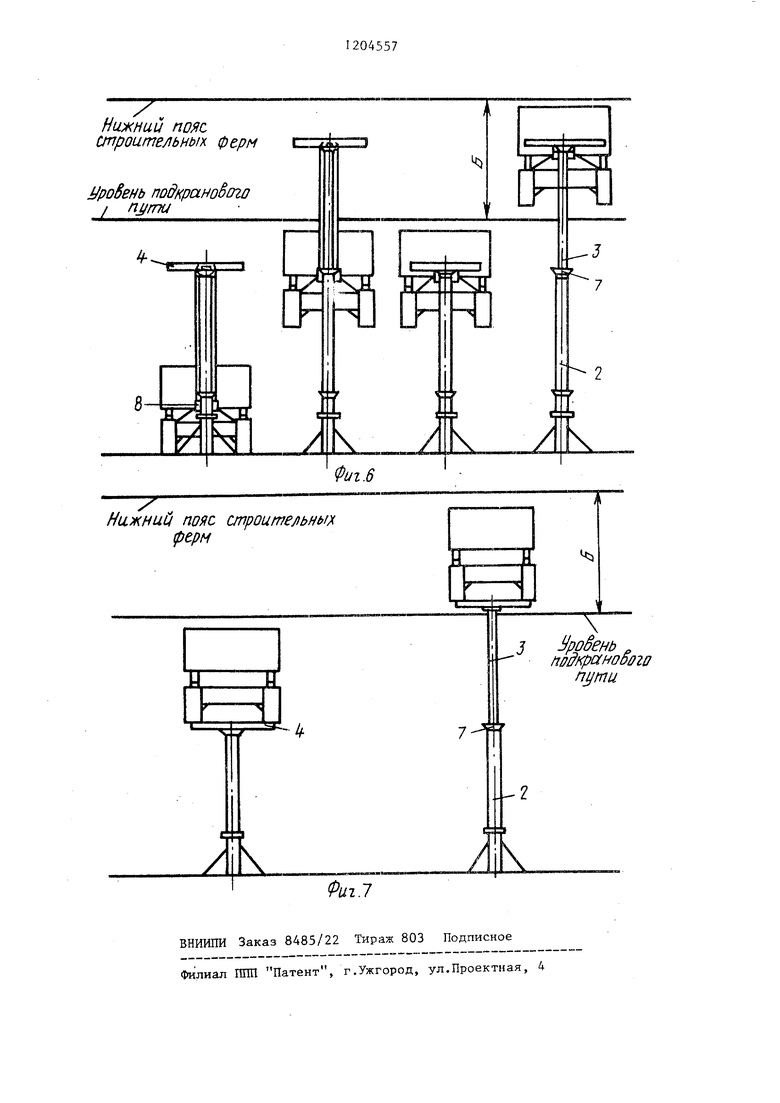
Ход Л выдвижной секции 3 при использовании подъемника для монтажа мостовых кранов выбирается примерно равным расстоянию от подкранового пути до нижнего пояса стропильных ферм,. Высоту подъемника выбирают менее расстояния от пола цеха до отметки подкранового пути с учетом возможности строповки монтируемого крана к грузовой площадке 8, не препятствуя работе зксплуатируемых в месте расположения подъемника мостовых кранов , что позволяет использовать краны на сборке и строповке.
Расстояние Б промышленных цехов меньше расстояния от пола до подкрановых путей. Поэтому монтируемый кран с уровня пола нельзя одним ходом секции 3 поднять над подкрановыми путями. Для обеспечения подъема монтируемого крана с пола цеха при удлиненной секции 2 соответственно удлиняются и подвески 11, При этом число захватов 12 и места их размещения на подвесках 1 1 соответствовать числу упоров 7 и местам их размещения на секции 2.
Подъемник работает по одной из следующих схем.
Схема монтажа крана с пола здания ( фиг, 6) .
3
Рассмоч рим случай, когда на секции 2 размещено два упора 7.
В монтируемую конструкцию (мостовой кран), установленную на полу цеха, заводят подъемник, развернув на Шарнирах кронштейны 16 таким образом, чтобы основание подъемника прошло между элементами рамы конструкции. Затем кронштейны 16 разводят для обеспечения необходимого размера опорного контура.Подъемник уста навливают на пол и вращением винтов 17 добиваются вертикальности положения его оси и прилегания башмаков 15 к полу цеха.
Монтируемую конструкцию закрепляют на грузовой площадке 8, которая зависит на захватах 12. Гидроцилиндром 5 выдвигают секцию 3 телескопического стержня с тросовой подвеской 11. В этом положении кулачки 9 сдвинуты к центру и удерживаются пружинами 23 и 26.
Соленоид 20 выключен, оба кулачка 10 выдвинуты пружинами 19 и скользят по секции 2. Подъем продолжается до достижения грузовой площадкой 8 с застропленным краном уровня нижнего упора 7. Кулачки 10 своими скосами проскальзывают пО упору 7 и располагаются над ним. Опускают выдвижную
секцию 3 до упора нижних кулачков 10 в упор.
При дальнейшем опускании секции 3 захваты 12 раздвигают кулачки 9 и проходят между ними, пружины 23 и 26 возвращают кулачки 9 в исходное положение.
Затем секция 3 вновь выдвигается. Захваты 12 упираются в грузовую площадку 8 и поднимают ее вместе с грузом (положение 1 фиг.4). Кулачки 10 выдвинуты и скользят по секции 2.
Выдвижение секции 3 продолжается до подъема грузовой площадки В с кулачками 10 над следующим упором 7 . Секция 3 снова опускается до сцепления верхних кулачков 10 с упором на рабочей площадке 4. При этом упор проскальзывает по скосу кулачков, а пружина 19 вдвигает кулачки в отверстия, расположенные на этом упоре (положение 1 фиг.З).
Очередным ходом секция 3 поднимает грузовую площадку В с монтируемым краном над подкрановыми путями; разворачивают кран и устанавливают его в проектное положение. В случае необходимости, для попадания крано04557
вых колес на рельсы, наклон подъемника осуществляют вращением винтов 17..
Приведение подъемника в исходное
г состояние или демонтаж мостового крана осуществляют следующим образом.
После отстроповки смонтированного крана или строповки демонтируе- Q мого крана, расположенного на под- |крановых путях, грузовая площадка 8 опускается до упора нижних кулачков 10 в верхний упор 7, расцепляется с упором площадки 4, для чего включаt5 ют соленоид 20, верхний кулачок 10 втягивается положение И гЬиг.З), секция 2 выдвигается, приподнимаясь над упором 7 до упора захватов 12 в грузовую площадку 8 и освобожде20 НИН нижних кулачков 10 от нагрузки. Эти кулачки соленоидом 20 втягиваются (положение 1П фиг.З) и при опускании секции 3. грузовая плоп1адка 8 на подвеске II опускается.
25 После прохождения кулачков 10 через упор 7 соленоиды 20 включают и кулачки пружинами 19 возвращаются в исходное положение 1.
При дальнейшем опускании грузовой
,р площадки она фиксируется нижними кулачками 10 на нижнем упоре 7, освобождая тем,самым захват 12 от нагрузки.
Подается жидкость в корпус гидроцилиндра 24 и при подъеме секции 3
захват 12 проходит через отверстие между ползунами, после чего подача жидкости прекращается и поднявщий- ся к этому моменту захват упирается в кулачки. Цикл опускания повторяет О ся, приводя подъемник в исходное состояние для подъема (опускания) следующего монтируемого (демонтируемого крана).
5 Схема монтажа крана при установке его на рабочую площадку 4 (фиг. 7). Конструкцию мостовой кран) устанавливают действующим мостовым кра-. ном ( или другим грузоподъемным меха50 низмом) на рабочую площадку 4 подъемника. Мостовой кран с помощью гидроцилиндра 5 поднимают над подкрановыми рельсами, выдвт{гая секцию 3 телескопического стержня, развора55 чивают на опорно-поворотном устройстве и опускают на подкрановые рельсы. Грузовая площадка и подвеска в этом случае в подъеме не участвуют.
Демонтаж конструкции (мостового крана} осуществляют в обратной последовательности.
При монтаже-демонтаже нескольких мостовых кранов в одном пролете цикл повторяется беэ переустановки подъемника.
Использование изобретения позво- ляет производить монтаж (демонтаж) тяжеловесных конструкций, в частности мостоаьпс кранов, в стесненных у:- ловиях под прекрытиями промьштенных зданий.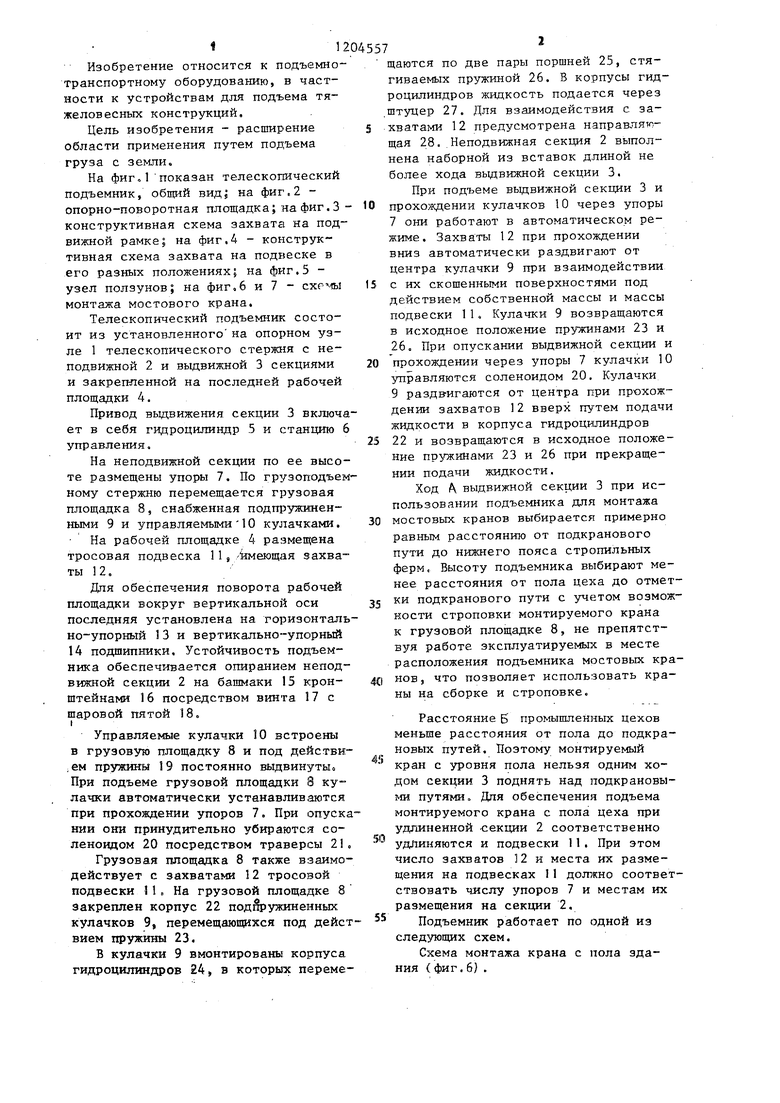
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический подъемник | 1990 |
|
SU1754641A1 |
| МОБИЛЬНЫЙ ПОДЪЕМНИК ДЛЯ МОНТАЖА, ДЕМОНТАЖА И ПЕРЕСТАНОВКИ МОСТОВЫХ КРАНОВ | 2013 |
|
RU2561177C2 |
| УСТРОЙСТВО для ПОДЪЕМА И МОНТАЖА ТЯЖЕЛОВЕСНЫХ | 1968 |
|
SU213320A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Подъемник для монтажа тяжеловесного оборудования | 1980 |
|
SU945043A1 |
| Установка для выполнения отделочных работ | 1990 |
|
SU1768730A1 |
| Поточная механизированная линия сборки и монтажа мостовых кранов | 1981 |
|
SU1066111A1 |
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU977335A1 |
| Консольный кран | 1982 |
|
SU1068376A1 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
и.г.2
А
Полож.Е
10
.Попо. Л
Фиг.З
J
Попоже. Xn
ФигЛ
L,
| Телескопический подъемник | 1971 |
|
SU494340A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
