Изобретение относится к приборостроению и может найти применение при создании систем автоматического контроля и управления подвижными технологическими объектами, в индукционном поле токонесущего проводника. Наибольшее применение оно может найти при автоматизации управления угледобывающими комплексами и агрегатами, а именно в устройствах автоматического контроля положения секций крепи относительно базы (конвейера) комплекса.
Известен способ контроля положения секций крепи относительно конвейера, основанный на определении с помощью тех или иных датчиков ее крайних положений. Этот способ заключается в установке герко- нов на элементах, жестко связанных с конвейером комплекса и магнитов на подвижных элементах секции определении положения секции по срабпыванию герко- нов.
Недостатком этого способа является низкая информативность, так как контроль осуществляется только в крайних точках.
Известен также способ контроля положения секций крепи, заключающийся в установке в гидродомкрат винтовой, пары, связанной с потенциометром, регистрации информации о положении секции по положению вала потенциометра, передаче данных на центральный пульт управления
Недостатком этого способа является низкая точность контроля вследствие механических связей, вращающихся пар и т д
Наиболее близким по технической сущности к предлагаемому является способ автоматического контроля положения раздвижности секций механизированной крепи, заключающийся в том, что излучают электромагнитное поле в секциях крепи, неподвижно фиксируя излучатель на каждой секции относительно элементов, жестко связанных с одной из ее поверхностей, а на элементах секций изменяющих свое поло(Л
С
ел
о ел
жение относительно этой поверхности, измеряют напряженность поля и по ее величине определяют раздвижность.
Недостатком такого способа является низкая точность вследствие зависимости результатов измерения от величины свободного объема, в котором распространяется электромагнитное поле, ограниченного ферромагнитными массами комплекса.
Цель изобретения - повышение точности контроля положения секций крепи относительно базы (конвейера) комплекса.
Поставленная цель достигается тем, что магнитную составляющую электромагнитного поля измеряют в двух точках, расположенных на линии перемещения секции на заданном расстоянии одна от другой, вычитают результат измерения в дальней точке от источника поля из результата измерения в ближайшей точке, делят результат измерения о дальней точке на полученную разницу, умножают полученное значение на величину, пропорциональную расстоянию между точками измерения и по полученному произведению судят о положении секции механизированной крепи относительно базы комплекса.
Благодаря операции измерения магнитной составляющей в двух точках, расположенных на линии перемещения секции на заданном расстоянии одна от другой, вычитания результата измерения в дальней точке от источника поля из результата измерения в ближней точке, деления результата измерения в дальней точке на полученную разницу, умножения полученного значения на величину, пропорциональную расстоянию между точками измерения, происходит повышение точности контроля, так как полученный сигнал, несущий информацию о положении секции относительно базы комплекса, не зависит от изменения величины свободного объема внутри комплекса, ограниченного большими ферромагнитными массами (например, величины раздвижности секции).
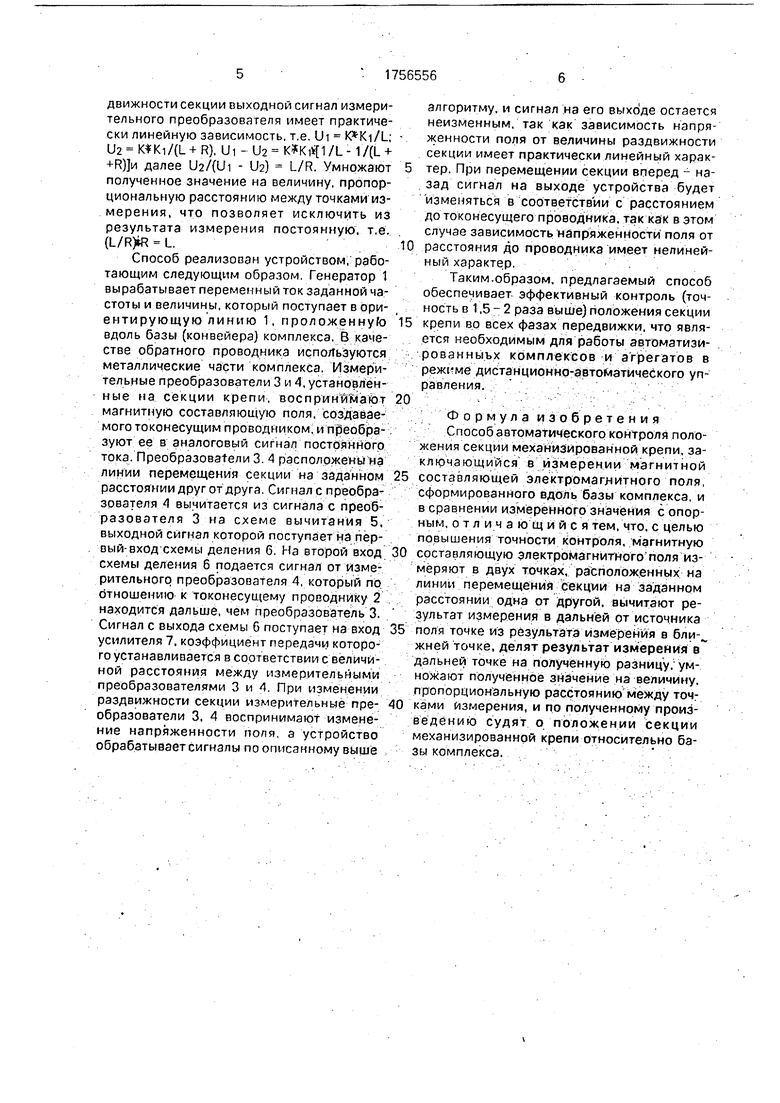
На чертеже представлена блок-схема устройства, реализующего предлагаемый способ.
Устройство содержит генератор 1, токонесущий проводник 2, измерительные преобразователи 3 и 4, схему вычитания 5, схему деления 6, масштабирующий усилитель 7, секцию 8 механизированной крепи, конвейер 9 комплекса.
Сущность способа заключается в следующем,
Известно, что напряженность магнитной составляющей поля в точке на расстоянии L от токонесущего проводника
определяется как Н l/2;rL. где I - величина тока в проводнике. Так как в качестве обратной ветви токонесущего проводника используют металлические части комплекса, то в первом приближении можно считать, что поле в пространстве между токонесущим проводником и частями комплекса, включая элементы крепи, аналогично полю коаксиального кабеля. Таким
0 образом, например, уменьшение расстояния между прямым и обратным проводниками вызывает увеличение напряженности поля в точке измерения, находящейся на фиксированном расстоянии от прямого про5 водника. Причем, как было установлено экспериментально, эта зависимость имеет вид, близкий к линейной. Измеряя напряженность поля в двух точках и обрабатывая полученные сигналы по следующему алго0 ритму, можно исключить указанное выше изменение величины поля из результата контроля положения секции относительно конвейера, где проложен прямой токонесущий проводник, а именно
5L RMJ2/(Ui-U2),
где L - контролируемое расстояние;
R - расстояние между измерительными преобразователями;
Ui, U2 - сигналы измерительных иреоб0 разовзтелей, расположенных в ближней и дальней от проводника точках соответственно.
Предлагаемый способ осуществляется следующим образом.
5 Формируют электромагнитное поле заданной частоты и величины тока в проводнике, который прокладывается вдоль базы (конвейера) комплекса. Измеряют магнитную составляющую электромагнитного по0 ля в двух точках, расположенных на линии перемещения секции на заданном расстоянии одна от другой. Величину расстояния между преобразователями выбирают исходя из их конструкционных особенностей,
5 а также контролируемого расстояния. Вычитают результат измерения в дальней точке от источника поля из результата измерения в ближайшей точке. Делят результат измерения в дальней точке на полученную раз0 ницу. Посредством этой операции исключается влияние изменения магнитной составляющей поля вследствие регулировки раздвижности секции. Пусть Ui K/L, Us K/(L + R) - сигналы с измерительных
5 преобразователей, где К - коэффициент, учитывающий конструкцию преобразователя, проводимость среды, величину тока и т.д . После регулировки раскрыва секции сигналы UIH U2 изменяются в Ki раз, так как было установлено, что при изменении раздвижности секции выходной сигнал измерительного преобразователя имеет практически линейную зависимость, т.е. Ui K Ki/L; U2 (L + R), Ui- U2 K Ki 1/L-1/(L + +R)n далее U2/(Ui - U2) L/R. Умножают полученное значение на величину, пропорциональную расстоянию между точками измерения, что позволяет исключить из результата измерения постоянную, т.е. ( L
Способ реализован устройством, работающим следующим образом. Генератор 1 вырабатывает переменный ток заданной частоты и величины, который поступает в ориентирующую линию 1, проложенную вдоль базы (конвейера) комплекса. В качестве обратного проводника используются металлические части комплекса. Измерительные преобразователи 3 и 4, установлен- ные на секции крепи, воспринимают магнитную составляющую поля, создаваемого токонесущим проводником, и преобразуют ее в аналоговый сигнал постоянного тока. Преобразователи 3. 4 расположены на линии перемещения секции на заданном расстоянии друг от друга. Сигнал с преобразователя 4 вычитается из сигнала с преобразователя 3 на вычитания 5, выходной сигнал которой поступает на первый-вход схемы деления G. На второй вход схемы деления 6 подается сигнал от измерительного преобразователя 4, который по отношению к токонесущему проводнику 2 находится дальше, чем преобразователь 3. Сигнал с выхода схемы б поступает на вход усилителя 7. коэффициент передачи которого устанавливается в соответствии с величиной расстояния между измерительными преобразователями 3 и 4. При изменении раздвижности секции измерительные пре- образователи 3, 4 воспринимают изменение напряженности поля, а устройство обрабатывает сигналы по описанному выше
алгоритму, и сигнал на его выходе остается неизменным, так как зависимость напряженности поля от величины раздвижности секции имеет практически линейный характер. При перемещении секции вперед - назад сигнал на выходе устройства будет изменяться в соответствии с расстоянием до токонесущего проводника, так как в этом случае зависимость напряженности поля от расстояния до проводника имеет нелинейный характер.
Таким.образом, предлагаемый способ обеспечивает эффективный контроль (точность в 1,5 - 2 раза выше) положения секции крепи во всех фазах передвижки, что является необходимым для работы автоматизи- рованныъх комплексов и агрегатов в режсме дистанционно-автоматического управления.
Формула изобретения Способ автоматического контроля положения секции механизированной крепи, заключающийся в измерении магнитной составляющей электромагнитного поля, сформированного вдоль базы комплекса, и в сравнении измеренного значения с опорным, отличающийся тем, что. с целью повышения точности контроля, магнитную составляющую электромагнитного поля измеряют в двух точках, расположенных на линии перемещения секции на заданном расстоянии одна от другой, вычитают результат измерения в дальней от источника поля точке из результата измерения в бли- жней точке, делят результат измерения в дальней точке на полученную разницу, умножают полученное значение на величину. пропорциональную расстоянию между точками измерения, и по полученному произведению судят о положении секции механизированной крепи относительно базы комплекса.
8
J4 DO
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического контроля и регулирования прямолинейности траектории движения горнодобывающего комплекса и устройство для его осуществления | 1985 |
|
SU1325168A1 |
| Способ автоматического контроля горно-технических параметров очистного забоя | 1986 |
|
SU1564343A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ МЕДНОЙ КАТАНКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2542624C1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1777682A1 |
| Способ вихретоковой дефектометрии | 1988 |
|
SU1627970A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2252422C1 |
| Способ управления очистным механизированным комплексом | 1986 |
|
SU1446296A1 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ НАПРЯЖЕНИЯ И ТОКА В КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННОЙ ЖЕЛЕЗНОЙ ДОРОГИ | 2009 |
|
RU2399920C1 |
| Способ вихретокового контроля углепластиковых объектов | 2019 |
|
RU2729457C1 |
Изобретение относится к приборостроению и позволяет повысить точность контроля положения секции механизированной крепи относительно базы комплекса Способ заключается в том, что с помощью генератора 1 и токонесущего проводника 2 формируют вдоль базы комплекса электромагнитное поле. На каждой секции устанавливают измерительные преобразователи (П) 3 и 4, которыми измеряют магнитную составляющую поля. Сигнал П 4 вычитают из сигнала П 3. Делят сигнал П 4 на полученную разницу. Умножают результат на величину, пропорциональную расстоянию между П 3 и 4. По полученному произведению судят о положении секции относительно базы комплекса, ил
| Способ автоматического контроля горно-технических параметров очистного забоя | 1986 |
|
SU1564343A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
