осям X, Y и Z соответственно ТД-Х, ТД-У и
тд-z.
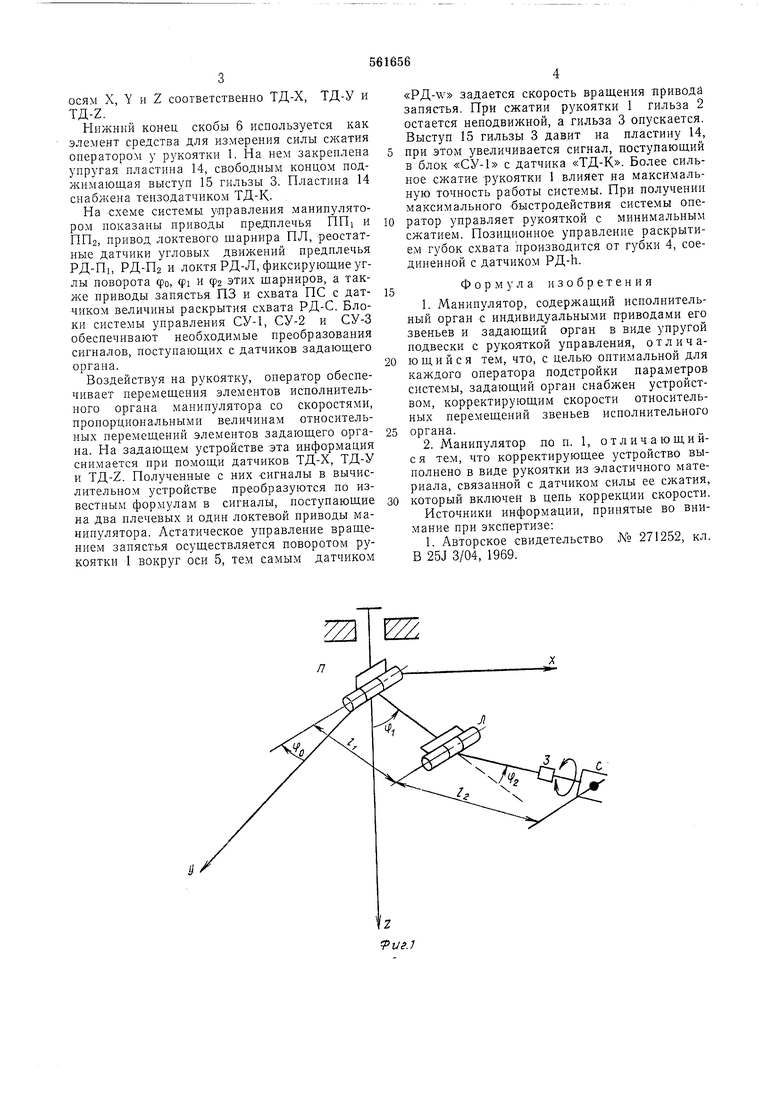
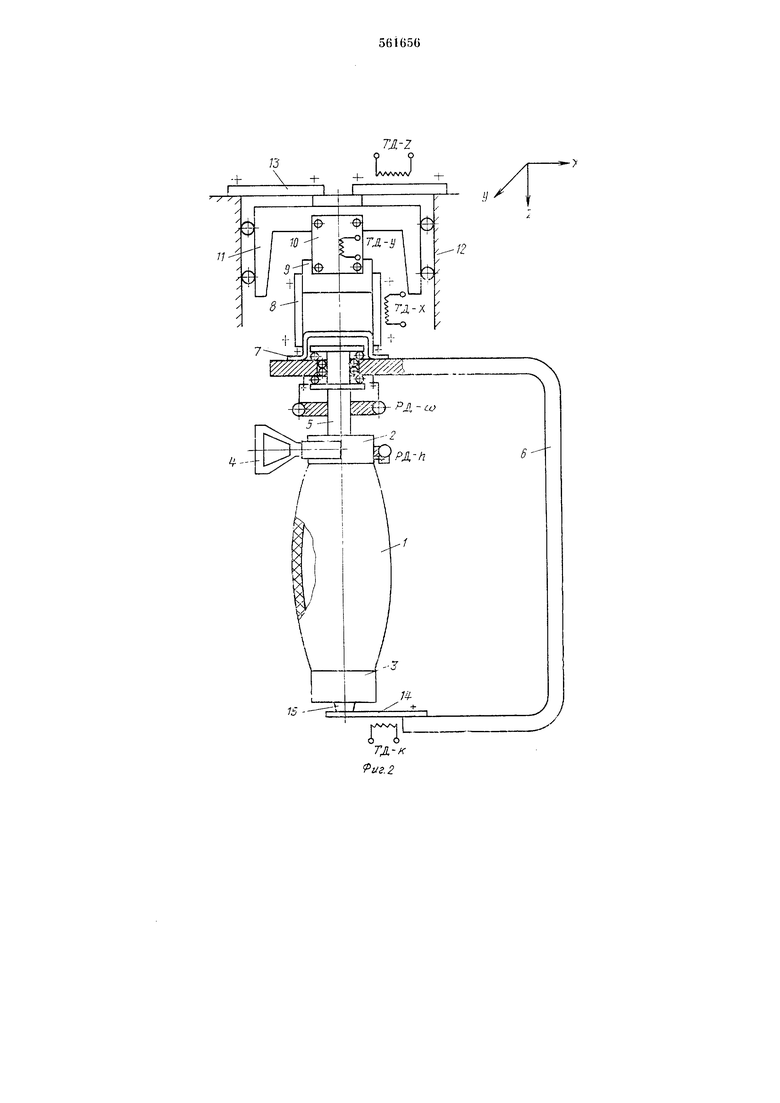
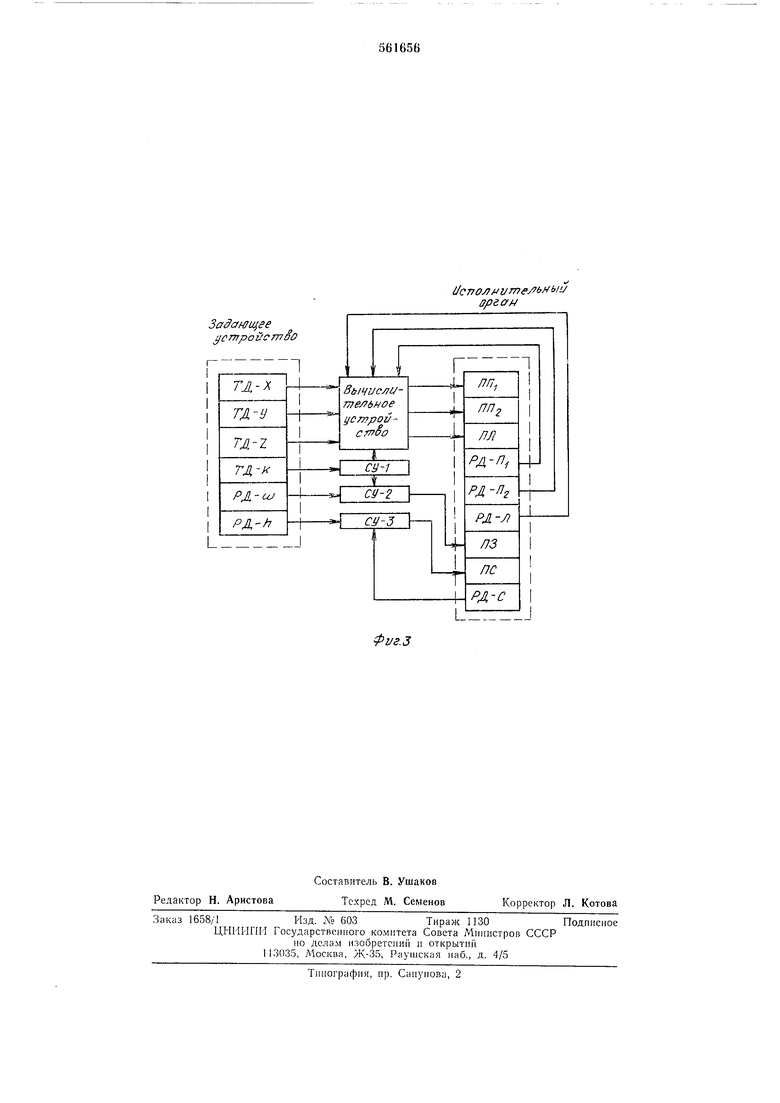
Нижний конец скобы 6 используется как элемент средства для измерения силы оператором у рукоятки 1. На нем закреилена упругая пластина 14, свободным концом поджимающая выступ 15 гильзы 3. Пластина 14 снабжена тепзодатчиком ТД-КНа схеме системы управления манипулятором иоказаны приводы предплечья ПН; и ПП2, привод локтевого шарнира НЛ, реостатные датчики угловых движений предплечья РД-Пь РД-П2 и локтя РД-Л, фиксирующие углы поворота фо, ф1 и ф2 этих шарниров, а также приводы запястья ПЗ и схвата ПС с датчиком величины раскрытия схвата РД-С. Блоки системы управления СУ-1, СУ-2 и СУ-3 обеспечивают необходимые преобразования сигналов, поступающих с датчиков задающего органа.
Воздействуя на рукоятку, оператор обеспечивает перемещения элементов исполнительного органа манипулятора со скоростями, пропорциональными величинам относительных перемещений элементов задающего органа. На задающем устройстве эта информация снимается при помощи датчиков ТД-Х, ТД-У и ТД-Z. Полученные с них сигналы в вычислительном устройстве преобразуются по известным формулам в сигналы, поступающие на два плечевых и один локтевой приводы манипулятора. Астатическое управление вращением запястья осуществляется поворотом рукоятки 1 вокруг оси 5, тем самым датчиком
«РД-w задается скорость вращения привода запястья. При сжатии рукоятки 1 гильза 2 остается неподвижной, а гильза 3 опускается. Выступ 15 гильзы 3 давит на пластину 14, при этом увеличивается сигнал, поступающий в блок «СУ-1 с датчика «ТД-К. Более сильное сжатие рукоятки 1 влияет на максимальную точность работы системы. При получении максимального быстродействия системы оператор управляет рукояткой с минимальным сжатием. Позиционное управление раскрытием губок схвата производится от губки 4, соединенной с датчиком РД-h.
Формула изобретения
1.Манипулятор, содержащий исполнительный орган € индивидуальными приводами его звеньев и задающий орган в виде упругой подвески с рукояткой управления, отличающийся тем, что, с целью оптимальной для каждого оператора подстройки параметров системы, задающий орган снабжен устройством, корректирующим скорости относительных перемещений звеньев исполнительного органа.
2.Манипулятор по п. 1, отличающийся тем, что корректирующее устройство выполнено в виде рукоятки из эластичного материала, связанной с датчиком силы ее сжатия, который включен в цепь коррекции скорости.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство N° 271252, кл. В 25J 3/04, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Система управления дистанционным манипулятором | 1975 |
|
SU582090A1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
гт
TJI-K .2
Sff cffffu ee j c poucmoo
i/CTJO vmeyfbHbuj зрган
