Изобретение относится к устройствам, автоматизирующим технологические процессы в горно-добывающей промышленности, в строительстве и металлообработке, а также на погрузочно-раз- грузочных работах.
Цель изобретения - расширение зоны манипулирования и снижение энергозатрат за счет уменьшения мощности привода, а 1 акже повышение надежности.
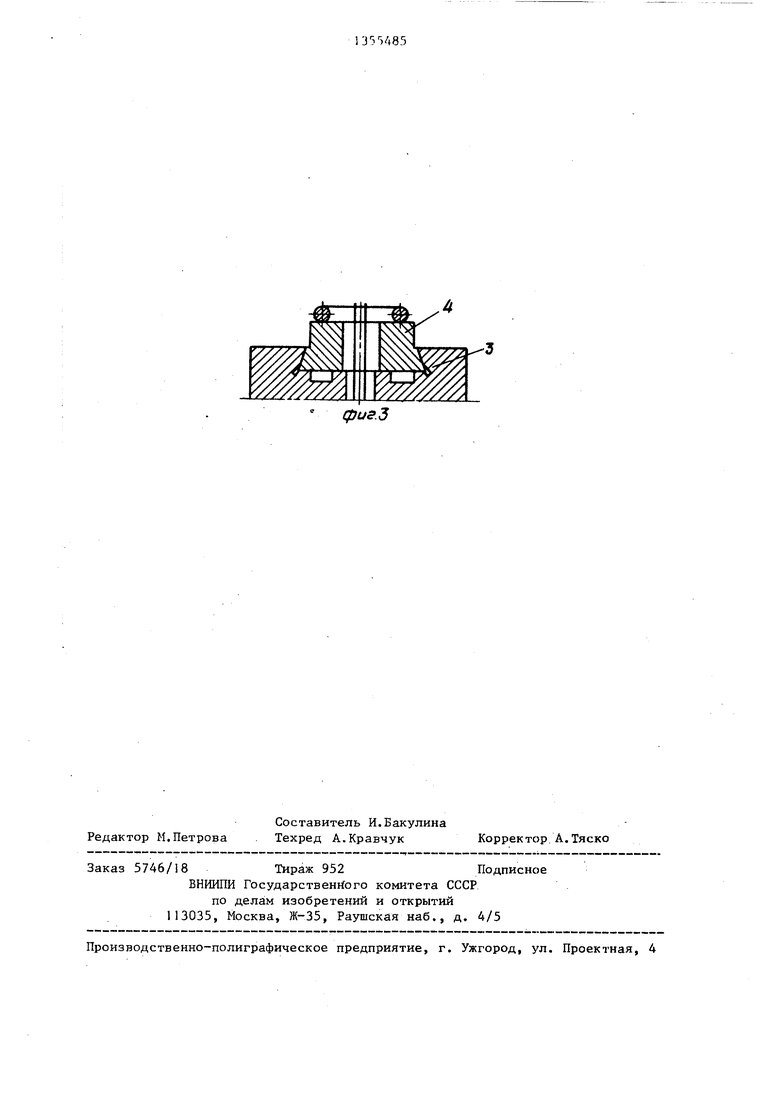
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - схват;на фиг.З платформа исполнительного органа,сечение по оси.
Манипулятор содержит поворотный (вращающийся) корпус 1 опорно-поворотного устройства (нижняя часть , i опорно-поворотного устройства не показана), втулку 2, установленную в корпусе I с возможностью возвратно- поступательного перемещения в нем с помощью индивидуального привода (не показан), платформу 3, закрепленную в верхней части втулки 2, фланец 4, установленньй на платформе и образующий с ней кинематическзто поступательную пару в виде ласточкина хвоста. Исполнительный орган установлен на фланце 4 и выполнен в виде каркаса 5, например цилиндрической пружины растяжения (или сжатия), схвата 6 с приводом механизма схвата, привода ротации 7 схвата, на корпусе этого привода закреплено ушко 8, в отверстии которого шарнирно установлен выходной элемент 9 основного привода 10 исполнительного органа. Основной привод 10 исполнительного органа выполнен в виде телескопического силового цилиндра с независимым выдвижением его частей, и -его корпус шарнирно установлен с отверстием ушка 11, расположенного на фланце 4. Гибкий элемент 12, например гибкий рукав, расположен внутри каркаса 5. На платформе 3 закреплен дополнительньш привод 13 исполнительного органа, и его выходной элемент связан с фланцем 4.
Манипулятор снабжен аппаратурой и средствами управления, следящими приводами, зрительным сенсором и может работать по программе с дистанционно-автоматическим управлением.
Манипулятор работает следующим образом.
После перемещения ходовой части манипулятора (не показана) непосред- -ствеино в зону работы с помощью зри
тельного сенсора определяется местонахождение детали, изделия, или груза, подлежаш,их перемещению (на пример,боковой стойки арочной крепи), и ее координаты. С помощью аппаратуры управления задаются рабочие перемещения исполнительного органа манипулятора.
Телескопический силовой цилиндр 10 при этом с помощью выходного элемента 9, перемещающегося вниз, изгибает исполнительный орган, поворачивая привод ротаций 7 схвата и схват за ушко 8з преодолевая при этом силу
g растяжения пружинного каркаса (или попросту пружины растяжения (сжатия). После перемещения выходного элемента 9 в крайнее нижнее положение дальнейшее перемещение схвата 6 при даль0 нейшем изгибе каркаса осуществляется за счет перемещения в нижнее положение выдвижных частей телескопического силового цилиндра 10. Схват 6 при этом перемещается из положения I че5 рез положение Г1 в положение ГТТ, с помощью схвата 6 захватывает перемещаемую деталь и перемещают снова в положеьгие Г Г с помощью цилиндра 10. Подвод рабочей жидкости к приводу схвата 6 и привод ротации 7 схвата осуществляется гибким рукавом 12, расположеннькм внутри каркаса 5. После этого деталь (боковая стойка крепи) поддается в положение IV с помощью поворота на 180 вокруг вертикальной оси вращающегося корпуса 1 опорно-поворотного устройства, разворачивается на 90° с помощью привода ротации 7 схвата и устанавливается в заданное положение с помощью возвратно-поступательного перемещения втулки 2 с платформой 3 и дополнительного привода 13, перемещающего фланец 4 исполнительного органа 5 по пазу типа ласточкина хвоста, выполненному в плат0
5
0
5
0
5
форме 3.
После этого боковая стойка крепи захватывается и удерживается с помо- щь ю приспособления (не показано).
Аналогичным образом устанавливается другая боковая стойка крепи. Схват 6 при этом перемещается в положение Т Т, манипуляции исполнительного органа аналогичны (кроме вращения вокруг оси опорно-поворотного устройства на 180 ).
При подъеме груза кпи детали пружинный каркас 5 стремится занять положение 1 (исходное), помогая.при
этом основному приводу Исполнительного органа - телескопическому силовому- цилиндру 10. С учетом этого обстоятельства мощность привода может быть соответственно уменьшена.
Формула изобретения
1. Манипулятор, содержащий поворотный корпус, фланец, несущий испол- нительньй орган, выполненный в виде гибкого элемента, армированного винтообразным каркасом, жестко связанным одним концом с фланцем, а другим концом - с приводом ротации схвата, и основной привбд исполнительного органа, отличающийся тем, что, с целью расширения зоны манипулирования и снижения энергозатрат,он снабжен втулкой, установленной в корпусе с возможностью возвратно-посту
пательного перемещения относительно него от индивидуального привода,платформой, закрепленной в верхней части втулки, и дополнительным приводом исполнительного органа, расположенным на платформе, причем фланец установлен на платформе и образует с ней кинематическую поступательную пару, а выходной элемент дополнительного привода связан с фланцем, при этом основной привод исполнительного органа выполнен в виде телескопического силового цилинидра, шарнирно связанного соответственно с фланцем И корпусом привода ротации схвата.
2. Манипулятор по п.1, отличающийся тем, что, с Целью повышения надежности, винтообразный каркас выполнен в виде цилиндрической пружины растяжения или сжатия.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1991 |
|
SU1757876A1 |
| Манипулятор | 1989 |
|
SU1720853A1 |
| Манипулятор | 1988 |
|
SU1565686A2 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2011 |
|
RU2476372C1 |
| Манипулятор | 1987 |
|
SU1495109A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Исполнительный орган манипулятора | 1985 |
|
SU1268398A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
Изобретение относится к устройствам, автоматизирующим технологические процессы в горно-добывающей про- мьшшенности, в строительстве и металлообработке, а также на погрузочно- разгрузочных работах. Целью изобретения является расширение зоны манипулирования и снижение энергозатрат за счет уменьшения мощности привода, а также повышение надежности. Для этого в корпусе 1 установлена втулка 2 с возможностью возвратно-поступательного перемещения в нем. На втулке 2 закреплена платформа 3, а на платформе 3 - фланец 4, образующий с последней поступательную кинематическую пару. Исполнительный орган вьшолнен в виде каркаса 5, например цилиндрической пружины растяжения (или сжатия), внутри которого размещен гибкий рукав 12, схвата 6, привод ротации 7 схвата. Исполнительньй орган закреплен на фланце 4 и перемещается в пространстве под действием основного 10 и дополнительного I3 приводов исполнительного органа. Основной привод 10 выполнен в виде телескопического си- лового цилиндра. 1 з.п. ф-лы, 3 ил. е S (Л СА5 СД Сл 4 00 ел . 1
фиг.2
фиг.З
Редактор М.Петрова
Составитель И.Бакулина Техред А.Кравчук
Заказ 5746/18 Тираж 952Подписное
ВНИИПИ ГосударственгСого комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А.Тяско
| Манипулятор | 1979 |
|
SU814721A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
