1
(21)4886443/11 (22)29.11.90 (46)07.09.92. Бюл. №33
(71)Могилевский городской центр научно-технического творчества молодежи Импульс
(72)Г.Л. Антипенко, A.M. Даньков, Н.И. Рогачевский, И.Л. Нетук, В.В. Ласьков и Ю.А. Подкопаев
(56)Меламед С.М. Кн. - Автоматические захваты для штучных грузов. М.: Машиностроение, 1965, с. 85, рис. 52.
(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
(57)Изобретение относится к области гпузоподъемной техники, в частности к i /.лизахватным приспособлениям. Целью изобретения является повышение безопасности работ при использовании захвата для плит и упрощение его обслуживания при
работе. Устройство состоит из рамы, шар- нирно закрепленных на ней жестких тяг, концы которых имеют поджимные элементы, а противоположные связаны между собой осями с закрепленными на них трисами, подвешенными к крюку грузоподъемного устройства. На раме также шарнирно закреплены валы, на которых расположены страховочные крюки, нажимной рычаг и ручка. В центре рамы, во втулке шарнирно закреплена скоба, на пальце которой установлен поворотный дмск, охваченный /ибкой тягой, концы которой закреплены на раме. Кроме того, для фиксации скобы в плоскости, параллельной осям, к скобе крепится один конец пружины, а другой цепляется за раму, при этом другими гибкими тягами ручки связаны с осями жестких тяг. 5 ил.
со
С
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 2015 |
|
RU2595204C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ СТРАХОВКИ АЛЬПИНИСТОВ | 2000 |
|
RU2193431C2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Захват для грузов с проушинами | 1990 |
|
SU1730002A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| Грузозахватное устройство | 1977 |
|
SU901230A1 |
| Захват для пакетированных грузов на поддонах | 1980 |
|
SU1030295A1 |
| Грузозахватное устройство | 1979 |
|
SU885138A1 |
| Захват для контейнеров | 1980 |
|
SU956410A1 |
| Захватное устройство для пакетагРузОВ | 1979 |
|
SU796157A1 |
Изобретение относится к грузоподъемной технике, в частности к грузозахватным устройствам преимущественно для пакетов плит.
Известны устройства для укладки плит в штабеля и для разборки штабелей, в которых используются пневматические при- сосы.
В этом устройстве на монорельсовом пути при помощи тяговой цепи перемещается каретка, к которой жестко подвешены пневмоцилиндры, на нижних концах штоков которых укреплены резиновые чашки- присосы. На каретке также подвешены компрессор и вакуум-насос. Последний необходим для удержания плиты присосками, а компрессор - для управления пневмоци- линдрами подъема и опускания плиты. Как
видно, это устройство достаточно сложное и с ограниченными возможностями.
Для захвата пакета плит можно использовать рычажный клещевой захват. Однако он не может обеспечить безопасность работ, поскольку равномерного прижатия под- жимных элементов к торцам плит не обеспечивает, а элементы для страховки груза отсутствуют.
Известно также грузозахватное устройство, содержащее раму, жесткие тяги, одни концы которых посредством осей прикреплены к элементу подвеса, а другие снабжены поджимными элементами с механизмом их фиксации. Для страховки груза оно имеет крюки, выполненные заодно с ручками.
Недостатком такого устройства является сложность в обслуживании, т.к. при заXI
сл о V
vJ СЛ
с- ii освобождении фуза необходимо
( уитвие стропальщика. При захвате
и/ил из высокого штябелй или укладке их в
такой штабель это вызывает определенные
неудобства.
Целью изобретения является повышение удобства эксплуатации грузозахватного устройства.
Указанная цель достигается тем, что грузозахватное устройство, содержащее раму, жесткие тяги, одни концы которых посредством осей прикреплены к элементу подвеса, крюки для страховки груза, выполненные с ручками, поджимные элементы и механизм фиксации поджимных элементов, выполнено таким образом, что жесткие тяги шарнирно присоединены к концам рамы и связаны вторыми концами с поджимными элементами, а механизм фиксации последних включает в себя закрепленный в центре рамы поворотный диск, прикрепленный к диску перпендикулярно его плоскости палец, присоединенную к пальцу втулку и соединенную с втулкой, расположенную параллельно продольной оси рамы скобу, охватывающую концами упомянутые оси и пружину, прикрепленную к скобе и раме. При этом устройство снабжено также поворотно связанными с концами рамы валами, к которым прикреплены крюки для страховки груза, нажимные рычаги и ручки, гибкими тягами, одна из которых намотана средней частью на диско, огибает валы и прикреплена концами к торцам рамы с возможностью взаимодействия с нажимным рычагом, а другие присоединены одними концами к валам у основании ручки, а другими к упомянутым осям.
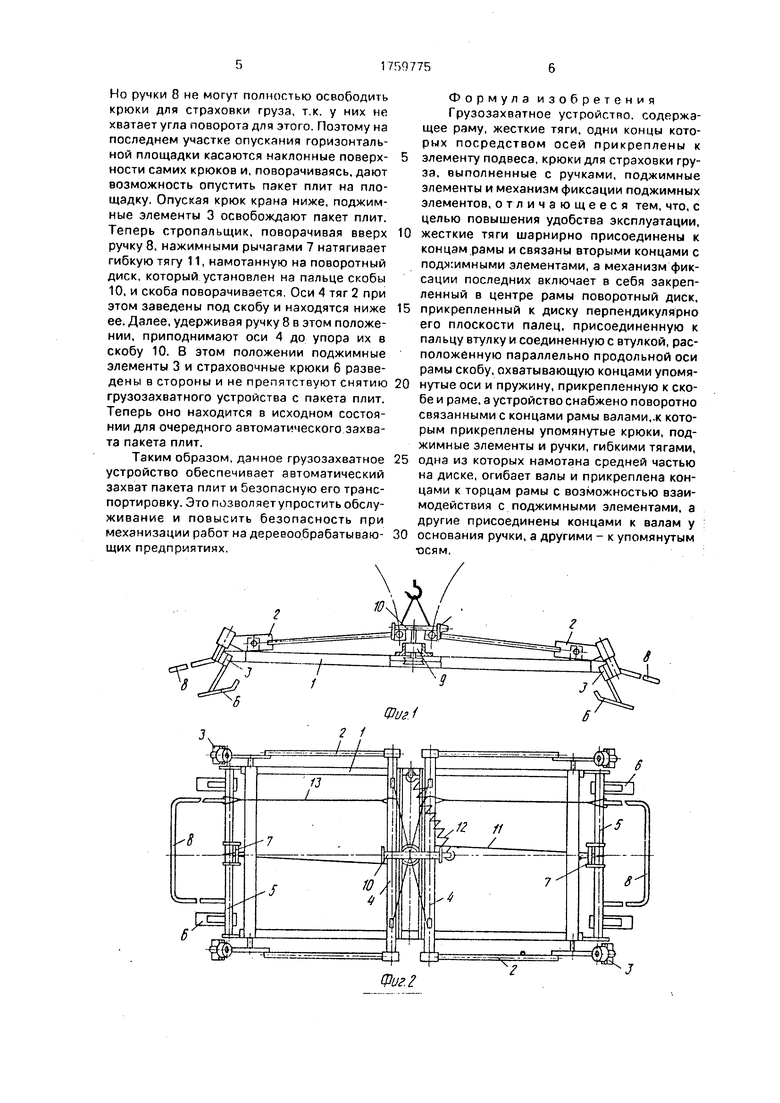
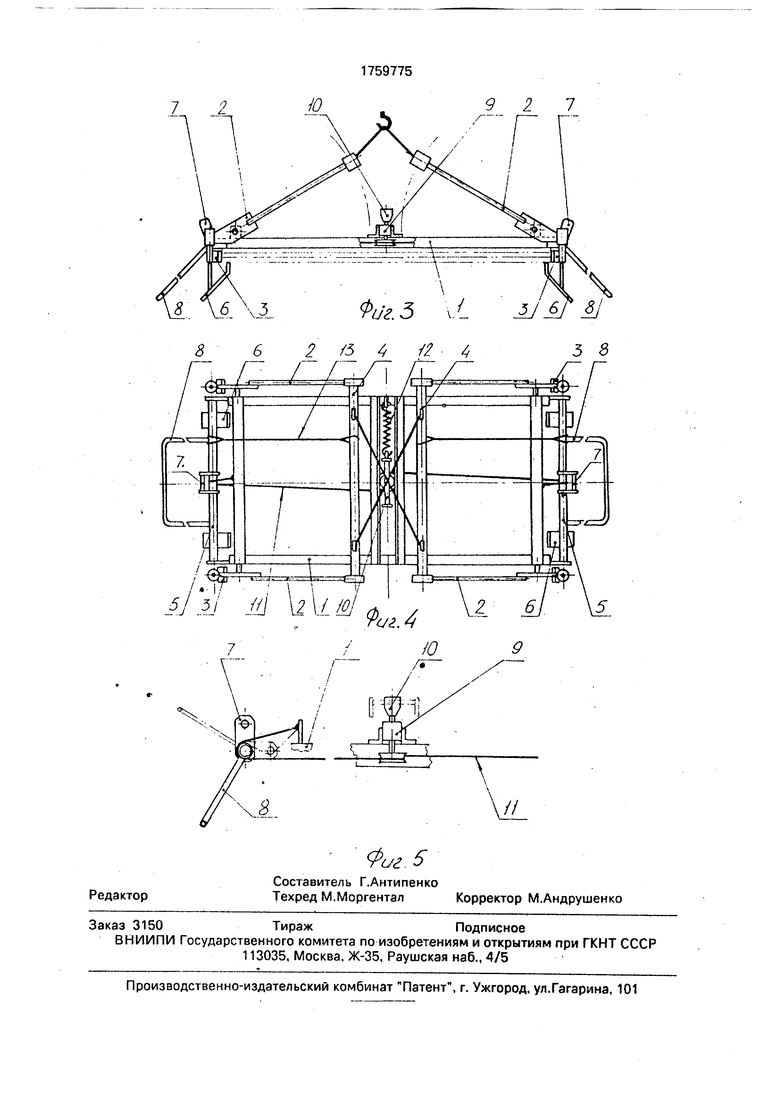
На фиг. 1 изображено устройство в положении готовности к автоматическому захвату груза; на фиг. 2 - то же, вид сверху; на фиг, 3 - грузозахватное устройство в положении транспортировки груза; на фиг. 4 -то же, вид сверху; на фиг. 5 - схема управления положением скобы с помощью нажимного рычага.
Грузозахватное устройство состоит из рамы 1, шарнирно закрепленных на ней жестких тяг 2, концы которых имеют поджимные элементы 3, а противоположные связаны между собой осями 4 с закрепленными на них тросами, подвешиваемыми к кпюку грузоподъемного устройства, На раме 1 также шарнирно закреплены валы 5, на которых расположены крюки для страховки i рузз б, иммь с: рычаги 7 и ручки 8. В цен грг рами %п 9 шарнирно закреп- .чгна r, 10 H I цлл1,це которой закреплен r;(.F,opfiH .ii ,., сличенный гибкой тягой 11 ,i i ic 4 скреплены на раме 1.
Кроме того, для фиксации скобы 10 в плоскости, параллельной осям 4, к скобе крепится один конец пружины 12, а другой цепляется за раму. А гибкие тяги 13 связывают ручки 8
с осями 4 тяг 2.
Работает грузозахватное устройство следующим образом.
Грузозахватное устройство тросами, закрепленными на осях 4, подвешено на крю0 ке крана (кран-балки и др.). Поджимные элементы 3 тяг 2 разведены в стороны, а оси 4 находятся под скобой 10, которая позволяет удерживать поджимные элементы 3 в разведенном состоянии при перемещении
5 захвата до штабеля плит. Крюки для страховки груза 6 также разведены в стороны, поскольку при таком положении тяг2 закрепленные на оси 4 гибкие тяги 13 натягиваются и поворачивают вал 5, а следовательно, и
0 крюки б относительно вала 5 вверх.
Захват пакета плит осуществляется следующим образом.
Грузозахватное устройство краном опускается на штабель плит до касания его ра5 мы верхней плиты. Поскольку страховочные крюки б и поджимные элементы 3 разведены, то они не препятствуют укладке грузозахватного устройства на штабель. После касания рамой верхней плиты крюк крана
0 опускают еще ниже, чтобы оси 4, опускаясь под собственным весом, вышли из под скобы 10. Поскольку скоба 10 подпружинена, то как только оси 4 выйдут за пределы скобы, она п, ернется и станет в положение, при
5 котором не будет мешать тягам 2 захватывать груз. Теперь, поднимая крюк, тяги 2 поворачиваются на шарнирах рамы, подвижные элементы 3 зажимают пакет из не- ско льких плит, гибкие тяги 13 ослабевают и
0 страховочные крюки 6 опускаются на торцы плит. Количество захватываемых плит регулируется специальными винтами, которые регулируют расстояние между рамой и верхней плитой. Как только пакет плит припод5 нимается на небольшую высоту под нижнюю плиту заходят страховочные крюки 6 и препятствуют спаданию груза при транспортировке. После этого осуществляется безопасная транспортировка пакета плит,
0 например, к распиловочному станку.
Освобождение плит осуществляется в следующей последовательности.
Пакет плит, удерживаемых грузозахватным устройством, опускают на горизонталь5 ную площадку (стол распиловочного станка). Первыми горизонтальной площадки касаются ручки 8. При опускании они, скользя по этой площадке, поворачивают валы 5 и связанные с ними страховочные крюки 6, выводят их из-под нижней плиты.
Но ручки 8 не могут полностью освободить крюки для страховки груза, т.к. у них не хватает угла поворота для этого. Поэтому на последнем участке опускания горизонтальной площадки касаются наклонные поверх- ности самих крюков и, поворачиваясь, дают возможность опустить пакет плит на площадку. Опуская крюк крана ниже, поджимные элементы 3 освобождают пакет плит. Теперь стропальщик, поворачивая вверх ручку 8. нажимными рычагами 7 натягивает гибкую тягу 11, намотанную на поворотный диск, который установлен на пальце скобы 10, и скоба поворачивается, Оси 4 тяг 2 при этом заведены под скобу и находятся ниже ее. Далее, удерживая ручку 8 в этом положении, приподнимают оси 4 до упора их в скобу 10. В этом положении поджимные элементы 3 и страховочные крюки 6 разведены в стороны и не препятствуют снятию грузозахватного устройства с пакета плит. Теперь оно находится в исходном состоянии для очередного автоматического захвата пакета плит.
Таким образом, данное грузозахватное устройство обеспечивает автоматический захват пакета плит и безопасную его транспортировку. Это позволяет упростить обслуживание и повысить безопасность при механизации работ на дерееообрэбатываю- щих предприятиях.
Формула изобретения Грузозахватное устройство, содержащее раму, жесткие тяги, одни концы которых посредством осей прикреплены к элементу подвеса, крюки для страховки груза, выполненные с ручками, поджимные элементы и механизм фиксации поджимных элементов, отличающееся тем, что, с целью повышения удобства эксплуатации, жесткие тяги шарнирно присоединены к концам рамы и связаны вторыми концами с поджимными элементами, а механизм фиксации последних включает в себя закрепленный в центре рамы поворотный диск, прикрепленный к диску перпендикулярно его плоскости палец, присоединенную к пальцу втулку и соединенную с втулкой, расположенную параллельно продольной оси рамы скобу, охватывающую концами упомянутые оси и пружину, прикрепленную к скобе и раме, а устройство снабжено поворотно связанными с концами рамы валами,-к которым прикреплены упомянутые крюки, поджимные элементы и ручки, гибкими тягами, одна из которых намотана средней частью на диске, огибает валы и прикреплена концами к торцам рамы с возможностью взаимодействия с поджимными элементами, а другие присоединены концами к валам у основания ручки, а другими - к упомянутым осям,
Фиг. 2
8
2 /5 4 /24
Л
Jj.LI M
Редактор
Составитель Г.Антипенко
Техред М.МоргенталКорректор М.Андрушенко
3 8
$«г.4
Фиг 5
